Chers lecteurs,
Nous regrettons fort de devoir vous le dire, mais l’article suivant n’est pas des plus joyeux.
Il raconte la triste aventure de quatre étudiants en deuxième année de classe préparatoire à Polytech’Angers qui ont toutes les malchances et collectionnent les angoisses.
Dans cet unique article, ils vont affronter les standards de la DGAC, les regards d’une centaine d’élèves en classe de quatrième, un système GPS défaillant, et des interviews incessantes. Pour notre part, il est dans notre devoir de raconter ces funestes épisodes, mais rien ne vous interdit, chers lecteurs, de passer votre chemin et de cliquer sur un autre article.
Avec nos sentiments respectueux.
Rosanne Biotteau, Ersin Duman, Juliette Trahan, Emmy Teillet.
Bonjour à tous !
Nous sommes quatre étudiants en EI2 et pour le semestre 4, nous avons décidé de travailler ensemble sur le projet d’un ballon stratosphérique.
L’enjeu de ce projet était d’envoyer un ballon gonflé à l’hélium dans la stratosphère, de filmer le voyage et de récolter certaines données telles que la température, la pression, l’altitude, l’humidité et la quantité de CO2. De plus, nous devions nous rendre auprès des classes de quatrième du collège Clément Janequin, à Avrillé, afin de leur expliquer notre travail et de leur donner envie d’étudier les sciences.

Notre ballon et de notre chaîne de vol lors du lancer
Ce projet est un projet complexe, qui nécessite des compétences dans de nombreux domaines. Avant de commencer à travailler dessus, nous ne savions notamment pas qu’il fallait demander des autorisations, parfois plus de trois mois avant le lancer. Voici les différentes autorisations que nous avons dû demander :
-
DGAC (Direction Générale de l’Aviation Civile) !! Vous ne pouvez pas envoyer un objet traversant les voies aériennes quand vous voulez, où vous voulez !!
-
L’autorisation du Maire d’Avrillé pour lui demander son accord pour lancer notre ballon depuis le Stade Delaune d’Avrillé
-
Autorisation d’occupation du domaine public avec l’accord de la DGAC et du Maire, auprès de la Police Municipale d’Avrillé.
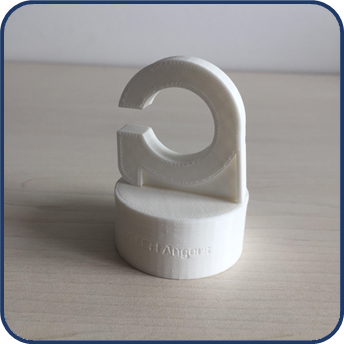
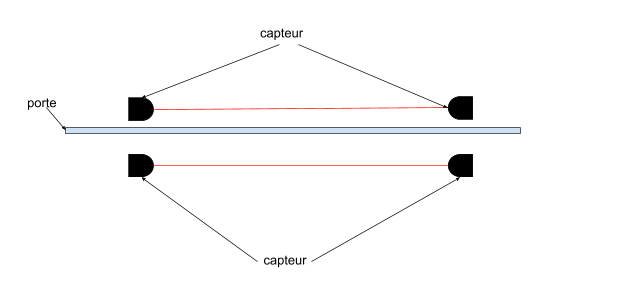
Dans notre nacelle, nous avions décidé de mettre deux GoPro afin de filmer le vol de la nacelle, deux capteurs de température (intérieur/extérieur), un capteur dit Baromètre mesurant la pression, l’altitude, l’humidité, un capteur GPS pour enregistrer la trajectoire de notre matériel, et un capteur de CO2.
De plus, pour retrouver tout cela une fois retombé sur terre, nous avions placé un traceur GPS ainsi qu’un téléphone connecté à un compte Google. Tous deux devaient nous communiquer leur position.

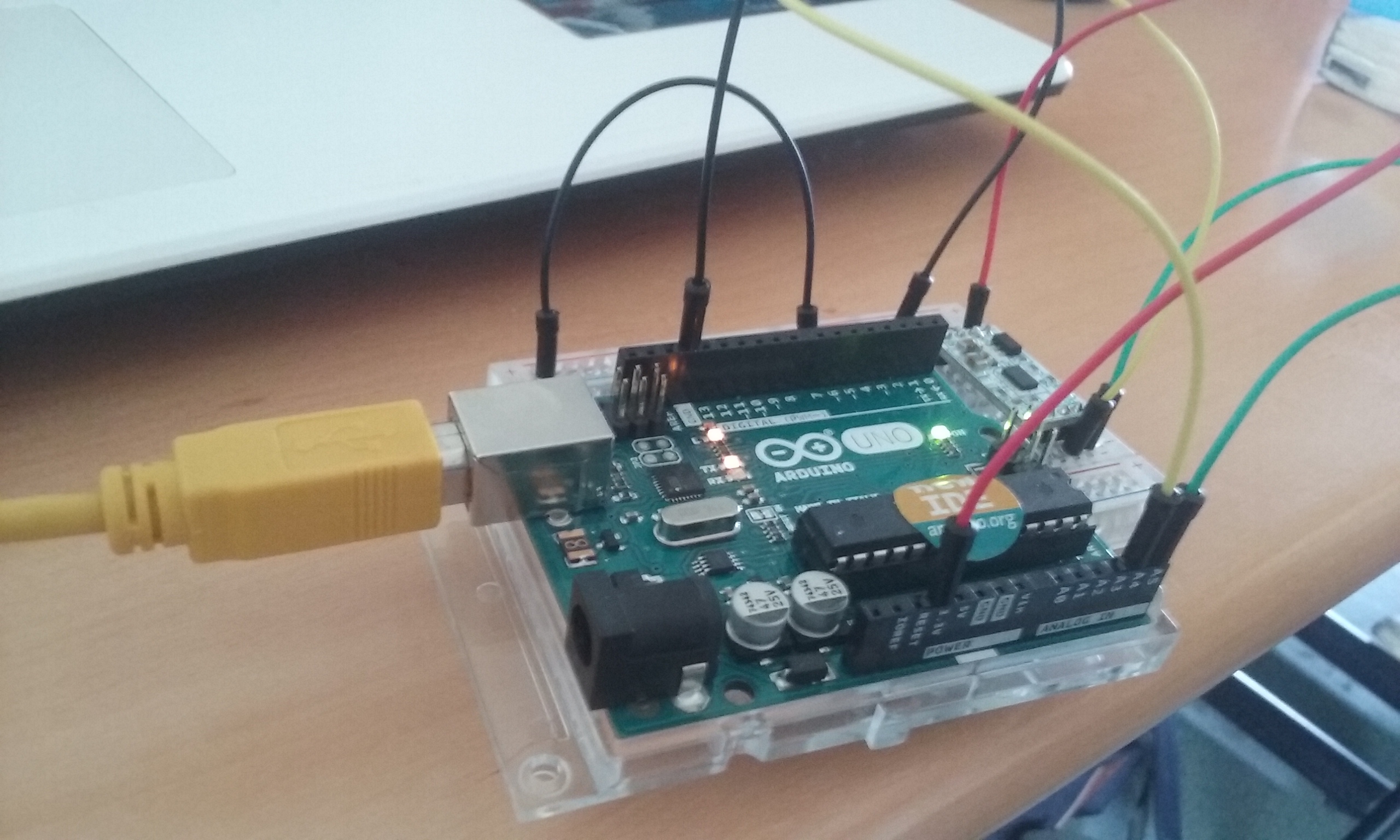
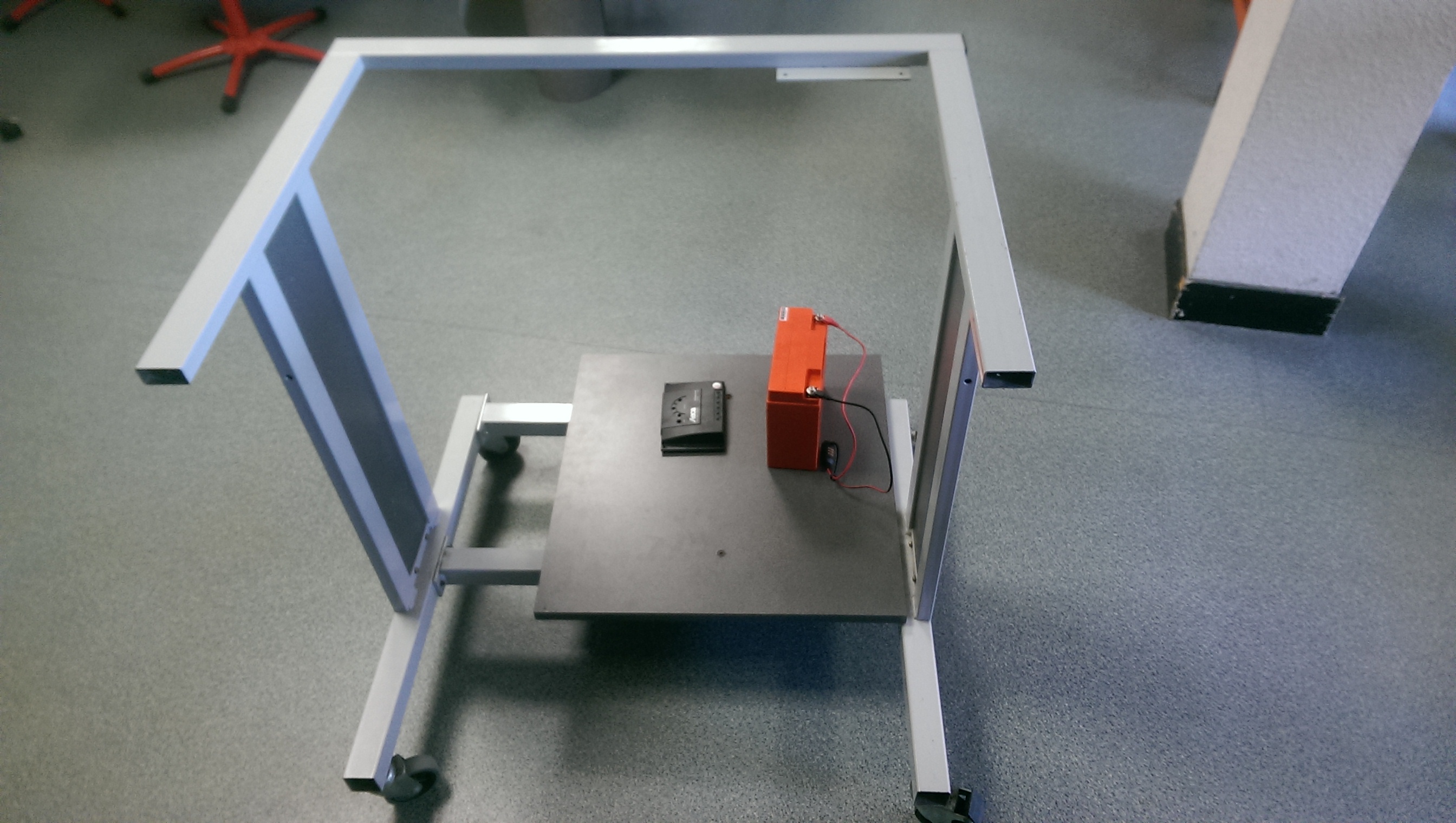
Ici vous pouvez voir l’intérieur de notre nacelle, comprenant les systèmes GPS ainsi qu’Arduino et son alimentation.
Nous avons fait un exposé le lundi 13 mai 2019 auprès des classes de quatrième du collège Clément Janequin d’Avrillé, afin de leur expliquer notre projet en sachant qu’ils allaient assister au lancement de notre ballon. Cet exercice était assez intéressant puisqu’il nous a permis de pouvoir nous exprimer devant des groupes d’une cinquantaine de personnes, de devoir apprendre à expliquer simplement des concepts pouvant être compliqués à comprendre pour un niveau de quatrième (la notion de forces par exemple).
La date du jeudi 6 juin 2019 pour le lancement était prévue depuis le début du projet. Après avoir installé tout notre matériel au stade Delaune, nous avons appelé les collégiens pour qu’ils assistent à ce moment mémorable. Tout s’est bien passé, et notre ballon a décollé bien plus rapidement que ce à quoi nous nous attendions.

Lundi 6 juin, Stade Delaune, Avrillé
Nous étions en train d’installer tout le matériel nécessaire, ici en train de gonfler le ballon. Il fallait le maintenir avec un drap afin qu’il ne s’envole pas de suite.
A l’aide d’une simulation réalisée sur Internet, nous savions que notre matériel devait se rendre dans la Mayenne, et atterrir aux alentours de Vaiges, mais plein de critères étaient pris en compte et la précision de cette simulation n’était pas optimale.

Itinéraire entre le Stade Delaune d’Avrillé et Vaiges

A la recherche de notre matériel, Vaiges
Lancer ce ballon présentait certains risques. :
-
Traverser des voies aériennes nécessitait l’autorisation de la DGAC !
-
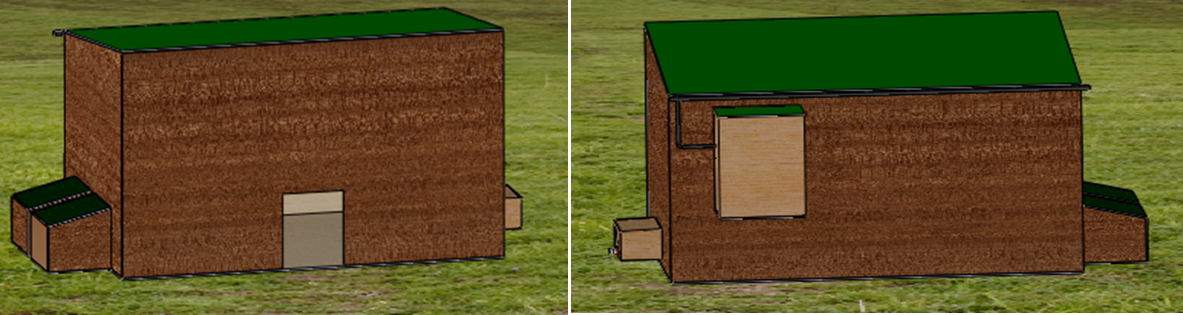
Il faut également savoir qu’en prenant de l’altitude, les températures peuvent descendre jusqu’à -60°C, ce qui est mauvais pour les batteries ! Pour cela notre nacelle était fabriquée en polystyrène extrudé, recouverte d’une couverture de survie. De plus, nous avions mis des chaufferettes à l’intérieur.
-
La chute du matériel n’est pas contrôlée. La nacelle peut très bien retomber sur une route et causer un accident, tomber dans l’eau, ou pire… en zone blanche, tout en sachant que nos deux systèmes GPS requièrent du réseau mobile afin de nous envoyer leur position. Le téléphone nécessite également des données mobiles afin de communiquer sa position sur une carte.
Malheureusement, 24 heures après le décollage… toujours aucune nouvelle…
C’est alors que commence notre longue et triste histoire… Sans nouvelle de notre nacelle, nous avons commencé par contacter les journaux. Quelques jours plus tard, nous retrouvions déjà notre avis de recherche sur plusieurs journaux (ici Ouest France) et même à la radio (ici Hit West) ! (une petite erreur de prénom, mais on n’a pas tout ce qu’on veut dans la vie…)
C’est alors que les témoignages fusent, mais aucun ne correspond à notre matériel…
C’est dans l’attente d’un signe de vie de notre nacelle que nous vous quittons.
Nous vous avions prévenu, bien que nous ayons acquis de nombreuses compétences, cette histoire n’est pas des plus joyeuses.