Nous sommes deux étudiants en deuxième année de cycle préparatoire d’école d’ingénieur, Alan et Romane. Nous avions pour projet d’améliorer la machine de recyclage de matériaux pour impression 3D.
Contexte
La machine de recyclage de matériaux pour impression 3D existait déjà au début de notre projet. En effet, il y a trois ans, deux élèves espagnols se sont lancés dans la création de cette machine composée de plusieurs éléments :
l’extrudeuse : permettant de chauffer les granulés et de faire sortir du fil
le système de refroidissement : constitué d’un ventilateur qui refroidit le fil dès sa sortie
le système de tirage : tire sur le fil
le système de bobinage : permettant d’obtenir une bobine de fil pour tout types d’imprimante 3D
le système d’alimentation : permettant de mettre en fonctionnement les deux moteurs
le système de mesure : permettant de mesurer le diamètre du fil instantanément
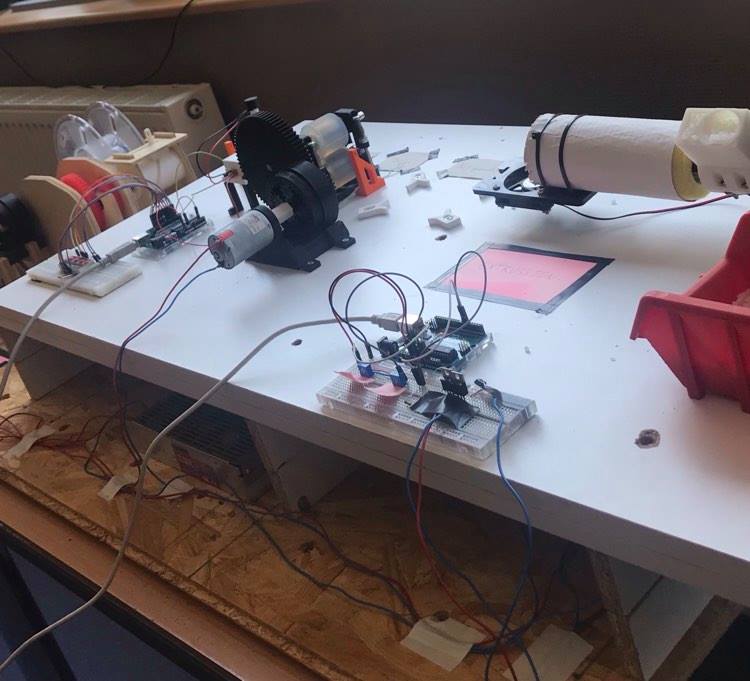
Photo de la machine de recyclage de matériaux pour impression 3D
Objectifs :
Nous avions pour objectif de vérifier le fonctionnement de la machine et de faire les réparations nécessaires dans un premier temps. Ensuite nous devions refaire le support du capteur pour avoir une meilleure précision sur les valeurs affichées. Pour finir, nous devions faire des modifications sur le code de la carte Arduino Uno afin d’obtenir un affichage plus précis et lisible.
Réparations :
La machine n’ayant pas fonctionné pendant trois ans, nous avons dû faire quelques réparations dès la première mise en route. Nous avons branché plusieurs fils ainsi que fait quelques raccordements. Nous devions coller différentes pièces qui s’étaient désolidarisées avec le temps ou encore serrer des vis. Nous avons donc dû faire attention à chaque élément de la machine dès la mise en route pour ne pas passer à côté d’une modifications ou réparations à faire.
Support Capteur :
La création d’un support pour le capteur est la partie la plus importante de notre projet. En effet, il fallait absolument créer un nouveau support car l’ancien, que nous avions en notre possession, laissait entrer beaucoup de lumières.
Il faut savoir que notre capteur fonctionne avec une LED de couleur rouge. Dès que le fil passe entre la lumière rouge et le capteur, il y a une ombre qui se forme sur le capteur. c’est grâce à cette ombre que le capteur peut récupérer une mesure.
Cependant, si le capteur est sujet à des perturbations telles que la lumière, il ne pourra pas fonctionner correctement et donner des résultats précis.
Nous nous sommes documentés sur les différentes formes que peut avoir un support capteur. Nous sommes tombés sur le site suivant :
Il nous a permis de concevoir un support de capteur qui réduit considérablement l’exposition de celui-ci à la lumière.
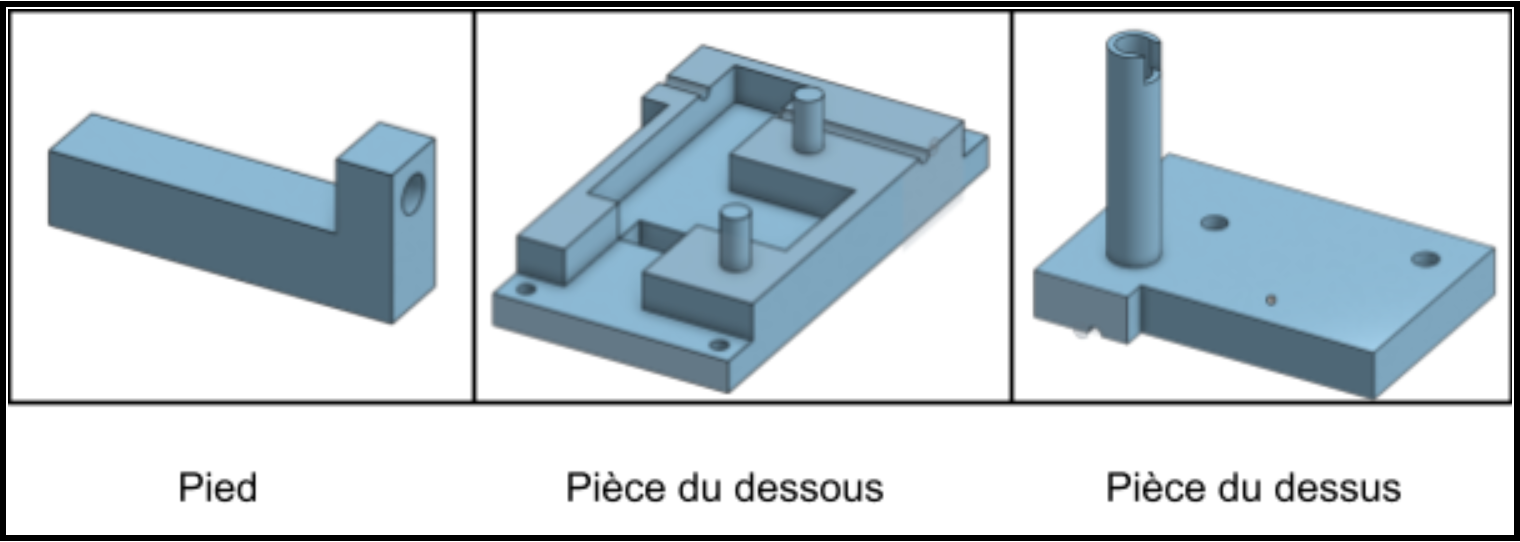
Nous avons décidé de réaliser notre support de capteur en trois parties :
4 pieds
pièce du dessous avec la place du capteur
pièce du dessus avec la place de la LED rouge
Ensemble des pièces qui constituent notre support Capteur
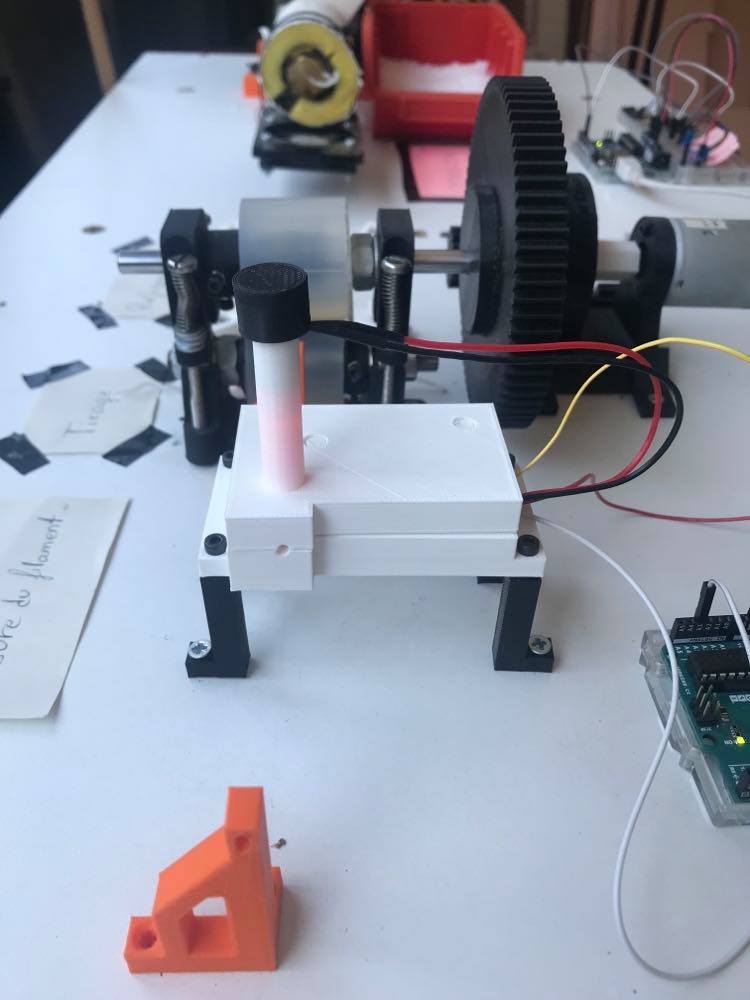
Après plusieurs impressions et réglages nous avons obtenu le support de Capteur que nous voulions.
Photo du support de Capteur final
Carte Arduino Uno :
Nous avons fini notre projet en nous occupant de la carte Arduino Uno. Notre but était d’afficher la valeur du diamètre mesuré de façon plus claire. Pour cela nous avons étudié le code de la carte Arduino Uno. Après plusieurs recherches sur le site internet Arduino et à partir de vidéos, nous avons trouvé le problème. Il fallait enlever cette ligne du code pour que l’affichage soit directement plus clair :
Conclusion :
Pour conclure nous avons réussi à refaire fonctionner cette machine de recyclage de matériaux pour impression 3D ainsi qu’à l’améliorer grâce au nouveau support de capteur et une modification du code existant afin d’obtenir un affichage du diamètre plus clair et lisible.
Bonjour, nous sommes Pierre PORTRON et Yohann CONANEC, tous les deux étudiants en PEIP2-A à Polytech Angers.
Le but de ce projet était de créer un système permettant d’accompagner un musicien en jouant une série d’accords sur un synthétiseur. Pour cela nous avions à notre disposition une carte Arduino UNO, muni de boutons poussoirs et d’un écran LCD, une pédale, un câble MIDI-USB et un câble Arduino-USB
Travail réalisé :
1-Le codage des accords :
Un accord est un ensemble de notes joué simultanément, ils sont définis par le type d’accords ainsi que la note fondamentale, qui est la première note jouée.
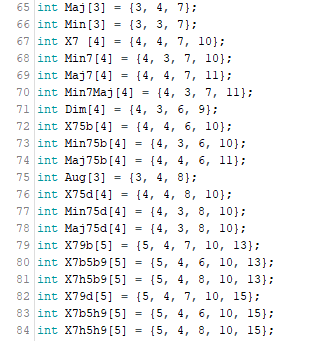
Pour coder les types d’accords nous créons un tableau pour chaque type, contenant dans l’ordre, le nombre de notes, l’écart entre les prochaines notes et la note fondamentale.
Afin de coder l’accord en lui-même nous avons numéroté chaque notes de 0 à 11 et chaque types d’accords de 0 à 19 que l’on multipliait par 12.
pour chaque accords on additionne la valeure de la note fondamentale et du type d’accord
exemple : type accord n7 : 2 * 12 = 24
note fondamentale D : 5
accords = 24 + 5 = 29
Afin de décoder l’accord lorsque l’on souhaite le jouer on trouve la note fondamentale en appliquant un modulo 12 à la valeur de l’accord et ont la divise par 12 pour trouver le type d’accord
Exemple :
Accords = 29
Note fondamentale= 29 % 12 = 5 = D
Type d’accord = 29 / 12 = 2 = n7
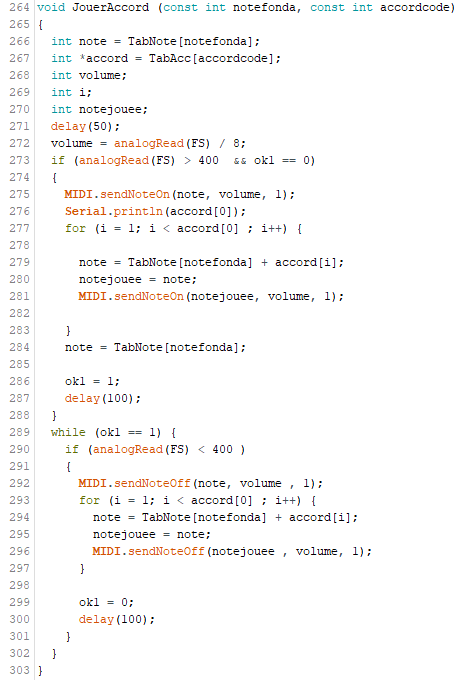
2-Jouer l’accord :
Pour jouer l’accord on le décode comme vu précédemment pour obtenir le type d’accord et la note fondamentale. Puis on utilise la fonction MIDI.sendNoteOn(note, volume) en additionnant à chaque fois la note fondamentale de la valeur noté dans le tableau du type d’accord.
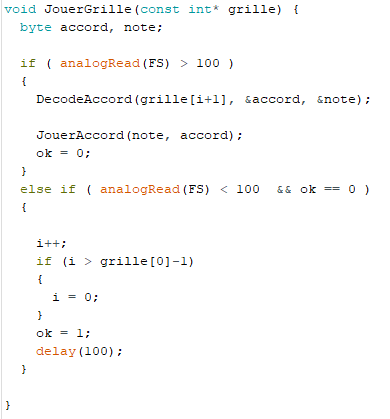
3-Les grilles d’accords
Les grilles d’accords sont des tableaux d’accords ce qui nous permet de jouer plusieurs accords à la suite.
Pour cela on regarde la valeur envoyée par la pédale (plus on appuie plus la valeur augmente)
Lorsque cette valeur dépasse 400 on joue le premier accord puis quand on la relâche on passe à l’accord suivant.
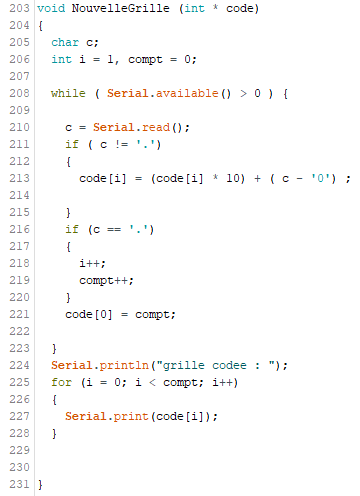
4-La liaison série
Pour entrer une grille manuellement, on utilise la liaison série Arduino présent sur l’IDE Arduino. On reçoit la nouvelle grille sous forme d’une chaîne de caractères que l’on transforme en un tableau d’entiers représentant les accords.
Bonjour à tous, nous sommes Tony Barbier, Jean Nobel et Errol Sistach, tous trois étudiants en deuxième année à Polytech Angers.
Dans le cadre de notre formation, nous sommes amenés à réaliser un projet. Le notre était la conception d’une voiture radiocommandée dont la particularité est la rotation de ses roues sur 180°.
Nous avons choisi ce projet car il est complet, il nous a permis de toucher à plusieurs domaines différents : la CAO, la mécanique, la programmation et l’électronique.
Les différentes étapes de notre projet ont été la modélisation, la programmation et finalement l’usinage de notre voiture.
Travail réalisé :
Présentation de la modélisation :
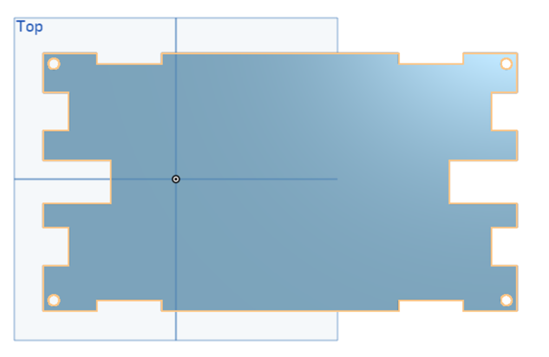
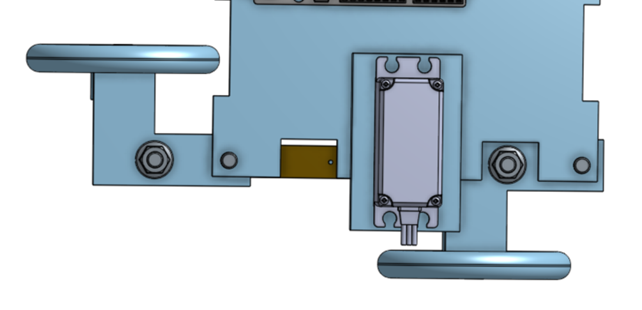
Tout d’abord le châssis. Sur les parties gauches et droites, l’enlèvement de matière sur l’axe horizontal est fait pour laisser passer les servomoteurs. Les deux renfoncements moins profonds sont prévus pour les boulons de serrage lorsque les roues seront soit à 90° à droite soit 90° à gauche.
Les trous sur les parties haute et basse sont faits pour laisser passer les roues quand elles seront complètement tournées.
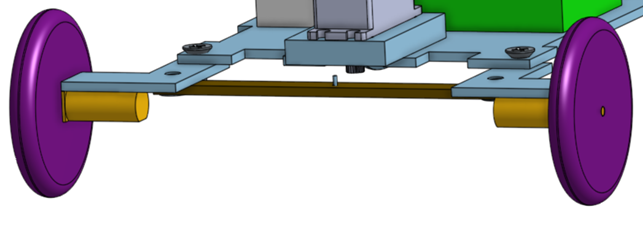
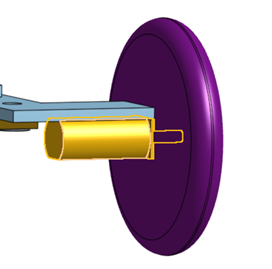
Voici l’essieu avant. Les deux essieux sont sensiblement identiques, la seule différence est qu’il n’y a pas de motoréducteurs (en jaune) à l’arrière.
Chaque essieu est composé d’une barre et de deux équerres. Pour pouvoir tourner, le palonnier (l’hélice) du servomoteur est relié à la barre, les essieux seront alors dirigés à gauche ou à droite selon la direction où l’on veut aller.
Pour finir cette partie, les roues arrières seront maintenues grâce à des carrés de fixation. Pour les roues avant, les motoréducteurs servent aussi d’arbres.
Réception et test des composants :
Après avoir réceptionné ces composants, nous avons branché les servomoteurs et les motoréducteurs à la carte Arduino, et nous avons tout alimenté avec une batterie pour vérifier leur bon état de fonctionnement.
Programmation :
Grâce aux bibliothèques AFMotor, Servo et SoftwareSerial il a été très facile de créer un programme pour piloter les moteurs. Il suffisait d’indiquer les pins sur lesquels les moteurs étaient fixés puis d’utiliser les fonctions incluses dans les bibliothèques pour les mettre en mouvement.
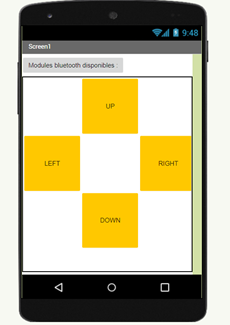
Grâce au site Mit App Inventor nous avons créé une application Bluetooth Android qui communique avec le module Bluetooth HC-06 et donc pilote la voiture. L’application est constituée d’une interface utilisateur pour se connecter au module Bluetooth puis faire avancer/reculer et tourner la voiture. La partie programmation est intuitive et se fait à l’aide de blocs. Lorsque l’utilisateur appuie sur un bouton, l’application envoie un ordre (par exemple « l » en ASCII pour « left ») et le module Bluetooth récupère cet ordre pour le transmettre à la voiture.
Mais la façon la plus simple de piloter la voiture reste celle sur ordinateur en utilisant le port USB de l’Arduino. Nous avons donc utilisé l’IDE Processing pour développer un programme permettant à l’utilisateur de communiquer avec la carte par l’intermédiaire d’un port USB.
Usinage :
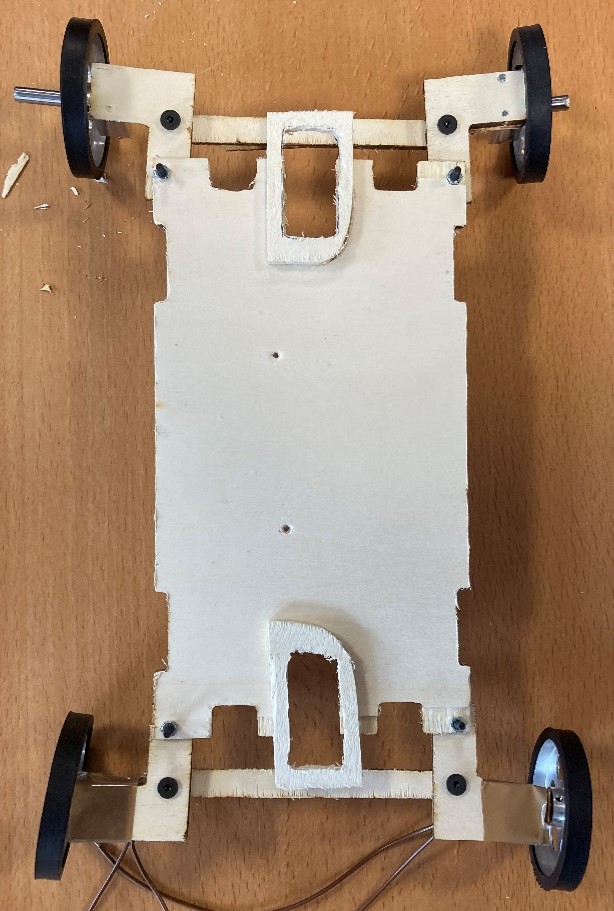
Notre voiture est faite à partir d’une plaque en bois de 5mm d’épaisseur. Nous avons utilisé la fraiseuse du Fablab de Polytech Angers pour usiner chacune des pièces nécessaires à la réalisation de la voiture.
Nous avons ensuite montés les pièces entres elles :
Puis nous avons soudé des fils électriques entre les motoréducteurs et la carte Arduino. Et pour finir, nous avons relié le palonnier de chaque servomoteur aux essieux respectifs.
Conclusion :
Ce projet nous aura été très formateur. C’était vraiment intéressant de se tourner vers quelque chose de plus concret.
C’est toujours une bonne expérience de travailler en équipe, d’autant plus lorsque c’est un projet comme cela.
Malheureusement, notre voiture était loin d’être parfaite mais nous sommes quand même fier du travail fourni et du résultat.
Nous sommes Esteban Cornu, Mattéo Jupille et Alexis Maupas des élèves en deuxième année de cycle préparatoire ingénieur et nous allons vous présenter notre projet intitulé “Système de stationnement automatisé sur Arduino”. Ce projet nous a vraiment attiré lors de la sélection car il correspond au domaine dans lequel nous souhaitons évoluer dans le cycle d’ingénieur. En effet, le projet possède toute une partie basée sur la programmation qui fait écho à la filière SAGI ainsi que sur la partie qualité, innovation et fiabilité qui nous initie à la filière QIF.
Le but est dans un premier temps de découvrir l’Arduino sur laquelle aucun de nous n’avait travaillé auparavant, mais nous étions tous impatients de commencer. Dans un second temps, le projet a permis de nous faire découvrir toutes les étapes à suivre pour mener à bien un projet. Pour cela, il faut s’organiser en répartissant correctement les tâches au sein du groupe dans le but d’être plus efficace. Tout au long du projet nous avons été épaulés par Monsieur Haddad.
Objectifs du projet
Trouver un moyen pour rendre un parking autonome
Concevoir et Programmer un parking situé en plein cœur d’une ville
Réaliser une maquette fonctionnelle de ce parking
Travail réalisé
1. Etude d’automatisation
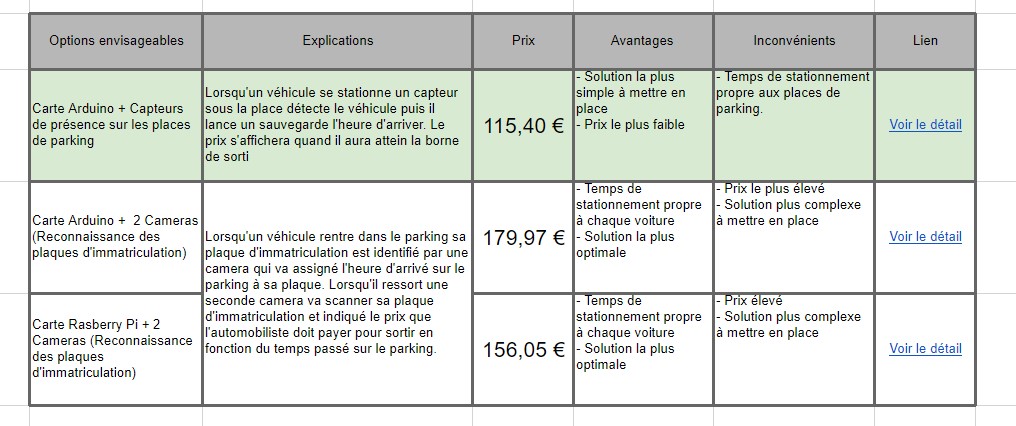
Nous avons établi trois possibilités pour réaliser ce parking automatisé. La première option consiste à utiliser une carte Arduino avec deux caméras à reconnaissance de plaque d’immatriculation. La deuxième sollicite une carte Arduino avec des capteurs optiques et la dernière se compose d’une carte Raspberry Pi avec deux caméras à reconnaissance de plaque.
Après avoir comparé les 3 alternatives en fonction du prix, de la fiabilité, de la complexité nous avons retenu la deuxième option.
Explication du fonctionnement :
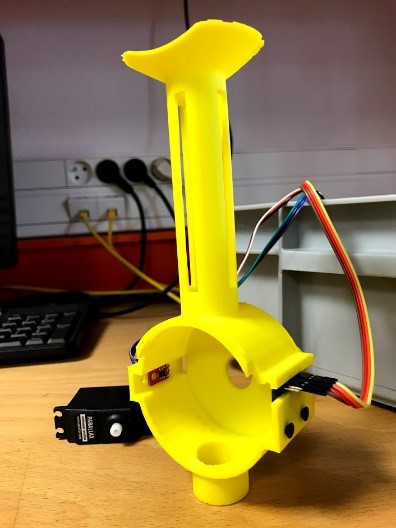
Un écran LCD indique le nombre de places restantes si le nombre de place est supérieur à 0 alors un véhicule peut rentrer. Des capteurs optiques placés sous le sol avant et après la barrière vérifient si la voiture est bien rentrée avant de refermer la barrière. La barrière s’ouvre et se ferme à l’aide d’un servomoteur. Puis la voiture peut se garer sur n’importe quelle place libre. Pour aider le conducteur nous avons placés des LED vertes et rouges au bout de chaque place. Si la LED est verte alors la place est libre, elle passera au rouge lorsque le véhicule sera bien garé au-dessus du capteur optique présent sur chaque place. A chaque fois qu’une voiture se gare un chronomètre associé à la place est lancé ce qui permet de vérifier le temps passé dans le parking. Lorsqu’un automobiliste décide de partir, l’écran affiche le prix à payer en fonction du chronomètre lié à sa place puis il peut partir par la barrière de sortie fonctionnant de la même manière que celle d’entrée.
2. Conception du parking
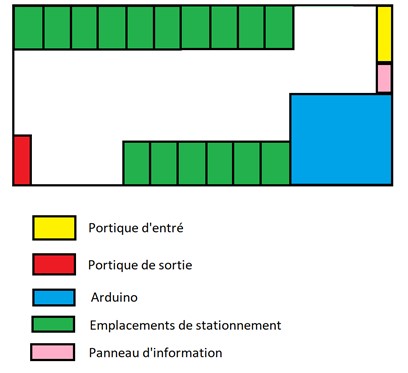
A. Agencement Parking
Nous devions ensuite imaginer l’agencement des places de parking ainsi que la position des barrières d’entré et de sortie mais aussi prévoir un emplacement pour cacher la carte Arduino.
Nous avons ajouté deux places de parking pour personnes à mobilité réduite selon l’arrêté du 1er août 2006 en respectant les normes.
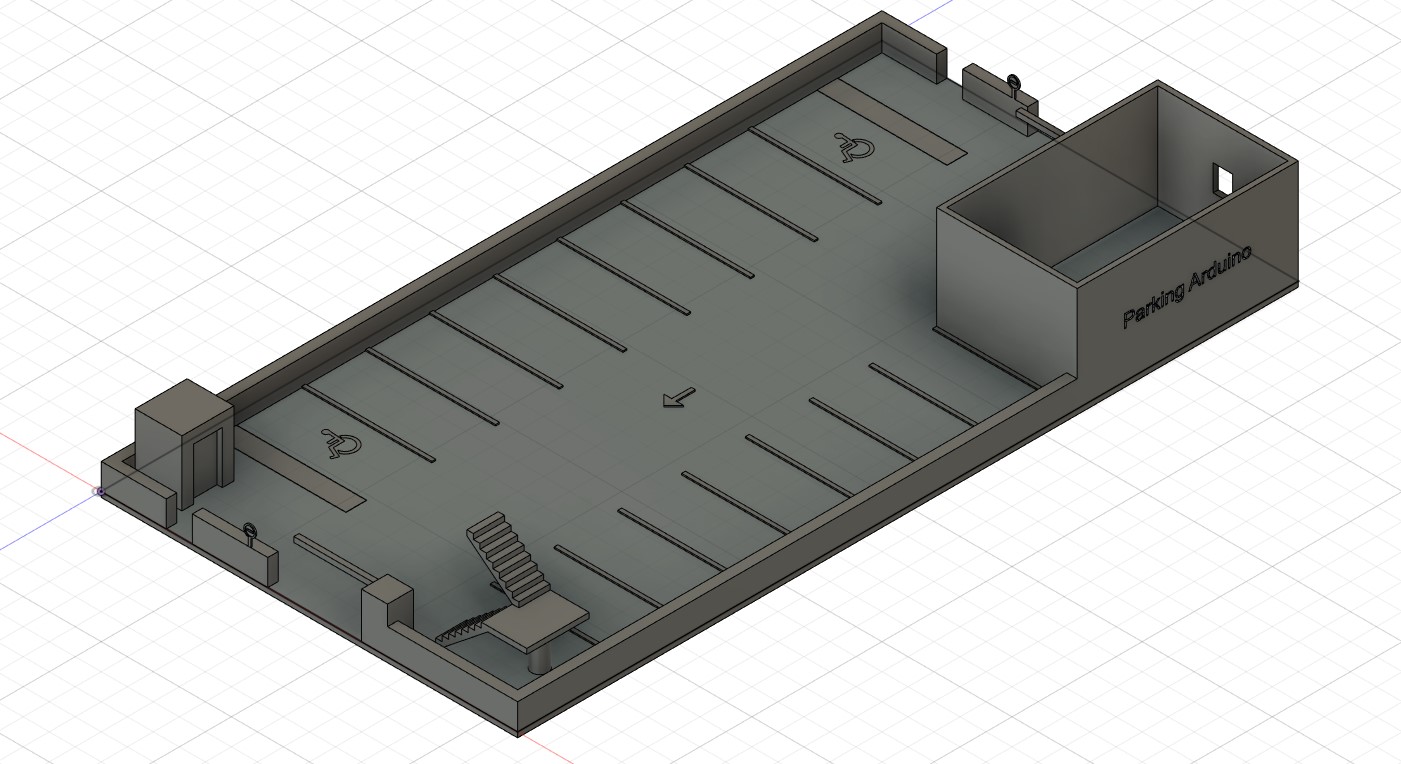
Le temps était maintenant venu pour nous de réaliser ce parking en 3D à l’aide du logiciel en ligne OnShape en taille réelle. Cette étape a pour but de nous aider à dimensionner le projet mais aussi de nous projeter dans le futur pour connaitre précisément l’emplacement de chaque composant.
Parking de 30m x 16m
B. Programmation
Afin de pouvoir contrôler tous les composants nous avons utilisé une carte Arduino MEGA car il fallait beaucoup d’entrées analogiques pour les capteurs optiques ainsi que beaucoup de sorties digitales pour contrôler chaque LED.
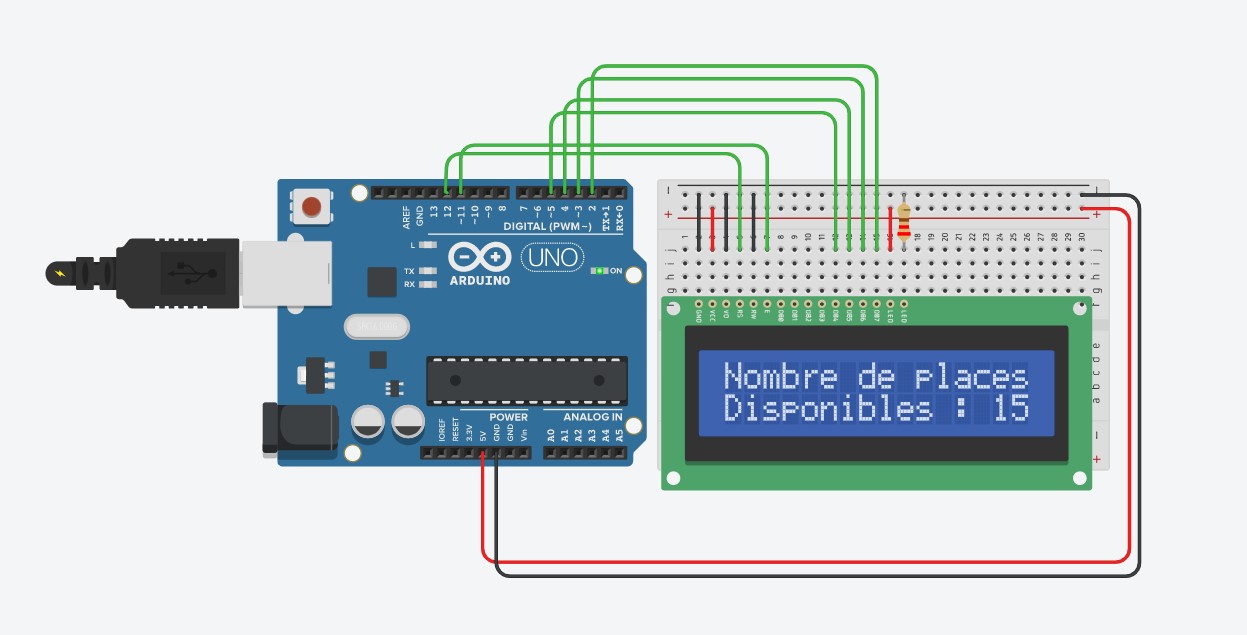
Sachant que nous attendions la livraison des composants nous en avons profité pour réaliser des tests sur le logiciel en ligne TinkerCad qui permet de simuler une carte Arduino pour venir y connecter des composants eux aussi virtuels. Ces nombreux tests nous ont permis de comprendre le fonctionnement de chaque composant ainsi que la manière de le brancher à la carte. Nous avons donc utilisé les librairies ServoMoteur et LiquidCrystal pour contrôler la barrière et l’écran LCD facilement. Cette étape nous a fait gagner beaucoup de temps car dès la réception des composants nous avons pu passer à la réalisation sans trop se soucier si le parking fonctionnera une fois l’assemblage des pièces 3D et de la planche en bois terminé.
TinkerCad-LCD
3. Réalisation de la maquette
La réalisation de la maquette à commencer lorsque nous avons reçu nos composants. Nous avons d’abord tracé l’emplacement de chaque élément (places, pièces 3D, …) pour ensuite commencer à découper la planche.
Découpage de la planche
Perçage de la planche
Soudure des composants
Après le découpage et le percage de la planche nous avons placé tous les composants ainsi que tous les pièces 3D.
L’étape suivant était de souder tous les composants entre eux afin de les connecter à la carte Arduino ce fut très long et périlleux en raison du nombre de composants à alimenter.
Nous avons ajoutés quelques détails comme les panneaux de sens interdit et les signalisations pour les places handicapées.
Résultat final
Conclusion
Pour conclure, nous sommes très reconnaissants d’avoir participé à ce projet pour clôture notre deuxième année préparatoire. En effet, nous avons pu découvrir ou approfondir plusieurs domaines comme la programmation Arduino, la conception assistée par ordinateur, la gestion du temps, la fabrication d’une maquette fonctionnelle, … En plus des connaissances, nous avons appris à concevoir de A à Z un projet ce qui va beaucoup nous aider dans nos futures missions en tant qu’étudiant en école d’ingénieur. Nous sommes très fiers car nous considérons avoir réussi à répondre correctement au cahier des charges en essayant d’innover. Nous profitons de cette conclusion pour remercier Monsieur Haddad pour nous avoir accompagné à concevoir ce projet.
Dans l’industrie il est fréquent de devoir trier des produits selon un ou plusieurs critères (forme,couleur, poids…). À l’image de ces problématiques, on propose ici de concevoir et de réaliser une trieuse de M&M’s selon leurs couleurs.
Notre équipe de 4 étudiants en EI2 est composée de Victor et Clément qui se sont chargés de la conception et la réalisation mécanique du système (réalisation des pièces sous SolidWorks , impression 3D des différents éléments, usinage avec la Charly Robot…) et 2 étudiants (Alexis et Maël) se sont chargés de la partie électronique et programmation (branchements à L’Arduino, commande des deux servomoteurs, récupération des données du capteur de couleur et infrarouge,…). Les deux sous-groupes ont travaillé en parallèle pour finalement fusionner leur travail afin de réaliser la trieuse de M&M’s.
Nous avons été accompagnés pour ce projet par deux professeurs : Mr Rémy Guyonneau et Mr Franck Mercier.
Présentation du projet :
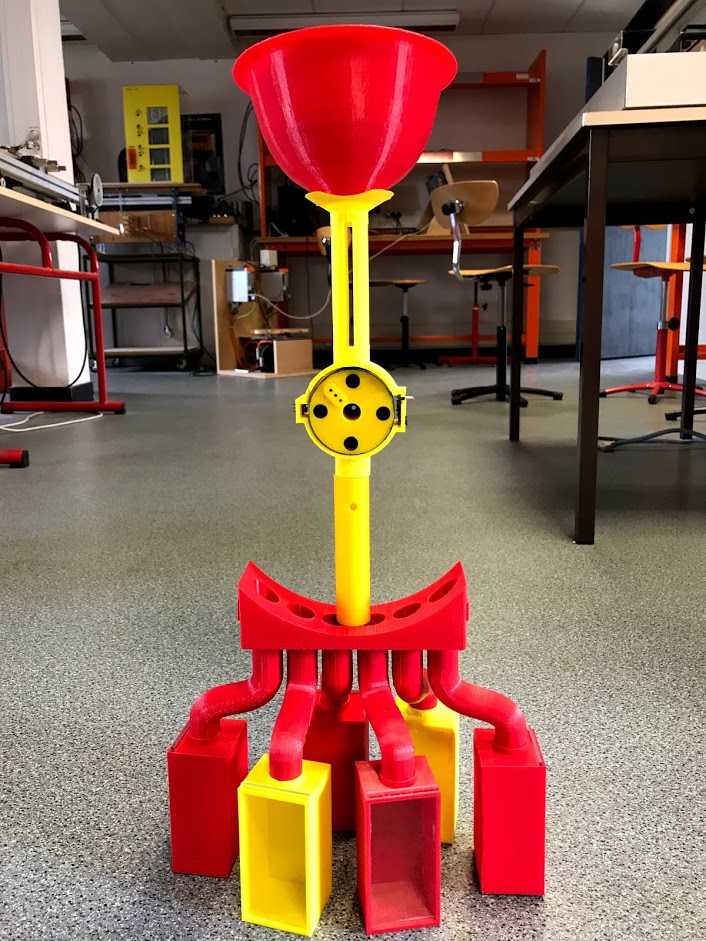
Les différentes pièces composant notre trieuse sont :
–L’Entonnoir : Présent tout en haut de la trieuse, c’est là où on intègre les M&M’s.
-Le « Porte-FeedWheel » : Pièce centrale de la trieuse, elle est composée d’un petit entonnoir sur le dessus, d’où sortent les M&M’s provenant de l’entonnoir principal, d’espaces vides pour le côté esthétique afin d’apercevoir les M&M’s qui tombent, ainsi qu’un espace en bas pour intégrer les capteurs et la pièce « FeedWheel »
-Le « FeedWheel » : Pièce ronde comprenant 4 cavités dans lesquelles un seul M&M’s peut rentrer. Un moteur à rotation continu est fixé à l’arrière du FeedWheel.
–Un capteur infrarouge : Fixé dans le « Porte-FeedWheel », il permet de détecter les erreurs d’approximations du moteur à rotation continu afin d’ajuster un angle correct.
–Un capteur de couleur : Fixé également dans le « Porte-FeedWheel », il permet de détecter la couleur du M&M’s correspondant.
-Le « Tuyau principal » : Directement relié au « Porte-FeedWheel », d’où sortent les M&M’s, collé à un servomoteur. Un angle spécial est appliqué à une couleur précédemment détectée.
-Le « Séparateur » : Pièce servant de lien entre le tuyau principal et les tuyaux secondaires. La forme du dessus est prévue pour la circulation du tuyau principal. Il comprend 6 trous, chaque trou correspond à une couleur.
-Les « Tuyaux secondaires » : Ils sont au nombre de 6 et servent de liaison entre le séparateur et les bocaux.
–Les bocaux : Ils sont également au nombre de 6 et sont les pièces de présentation des M&M’s finalement triés.
Ils sont reliés aux tuyaux secondaires correspondants et possèdent chacun une vitre transparente découpée avec le « Charly Robot ».
Au final nous avons assemblé toutes ces pièces et cela nous a donné une belle trieuse !
Les différentes étapes de notre projet :
Premièrement, nous avons établi en commun au brouillon une structure qui nous paraissait correct pour la partie mécanique et pour la partie programmation, tout en s’inspirant de même type de trieuses déjà existantes.
Une fois la structure plus ou moins établi au brouillon, nous séparons nos travaux en 2 groupes :
Après l’assemblage de ces pièces toujours sur SolidWorks, ce groupe passa aux impressions en 3D avec les imprimantes Raise3D et Makerbot.
En parallèle, pour les bocaux en bas de la structure, ce groupe réalisa un usinage grâce à la Charly Robot avec du plexiglas afin de créer une vitre transparente permettant de voir les M&M’s.
L’autre groupe se chargeait de la programmation de l’ensemble des composants électronique, à savoir : deux capteurs (RGB et Infrarouge) et deux moteurs (à rotation continu et servomoteur).
Ainsi nous avons commencé la programmation de chaque composant indépendamment pour prendre en main la programmation Arduino plus facilement.
Une fois chaque programme fini, nous les avons rassemblés en un et organisé la structure de notre programme final. De nouveaux composants se sont ensuite ajoutés comme l’écran LCD, le bouton ou l’utilisation d’un capteur IR pour positionner le moteur à rotation continue.
Problèmes rencontrés
Nous avons eu pas mal de problèmes au cours de notre projet.
Dès le départ nous ne savions pas par où commencer, comment se partager les tâches etc. Par la suite, nous avons commencé à imaginer le projet, il était difficile de mettre en commun nos idées. Lorsque nous sommes passés sous Solidworks, de nombreux bugs nous ont posé problème.
De plus, des pièces que nous avions modélisées puis imprimées se sont avérées ne pas être aux bonnes dimensions ou bien avec trop peu de jeu pour assembler les pièces. La couleur jaune de la pièce « FeedWheel » fut embêtante pour l’étalonnage des couleurs de bonbon. Cela a été résolu en aspergeant cette pièce avec une bombe de peinture noire.
Le problème majeur était surtout les pannes d’imprimante 3D qui nous ont beaucoup ralenties.
En programmation, il y a également eu quelques soucis. Par exemple, pour trouver la documentation de certains composants comme pour le capteur couleur ou l’écran LCD, la documentation était fausse.
Nous avons aussi rencontré des problèmes avec le câblage qui devenait illisible et problématique. Il était donc nécessaire de remettre des fichiers dans la racine du logiciel Arduino. Il a aussi été difficile d’étalonner chacune des couleurs des M&M’s.
Conclusion
Pour conclure, nous voulons absolument remercier nos tuteurs Mr Mercier et Mr Guyonneau pour toute l’aide apportée au cours de ce projet.
Pour nous, ce projet fut une grande expérience dans tout ce qui est du travail en groupe, de l’innovation, de la pratique…
Voir le projet grandir au fur et à mesure des séances nous a aussi motivé pour avancer et perfectionner le projet au maximum.
Merci à vous, chers lecteurs de vous être intéressés à notre projet.
Nous sommes 3 étudiants en classe préparatoire à l’ISTIA en seconde année et nous étions sur le projet InMooV.
Qu’est-ce que InMooV ?
InMooV est un projet créé par Gaël LANGEVIN, un français designer et sculpteur. C’est un projet en open-source sur Internet et vous pouvez retrouver le tout sur ce site. C’est la possibilité de créer un robot humanoïde de taille humaine grâce à une petite imprimante 3D (12*12*12cm) chez soi. De plus en plus, l’imprimante 3D se démocratise,et il a créé ce projet sur les bases du partages et de la communauté.
http://inmoov.fr/gallery-v2/
C’est quoi ce projet ?
Ce projet nous a été présenté par des professeurs de l’ISTIA, et c’est même un projet que la Mairie d’Angers finance. C’est de pouvoir fabriquer un robot humanoïde et de le faire fonctionner.
Notre projet de 2ème année était de prendre en “main” l’avant-bras et la main droite qui ont été créés auparavant, et de pouvoir créer un programme qui puisse faire bouger la main et qu’elle fasse des gestes plus ou moins simple. Par exemple, on peut lui faire faire le jeu du pierre,feuille,ciseaux, d’ouvrir et de fermer la main comme si il compressait quelque chose et d’autres gestes encore. Nous devions aussi pouvoir présenter l’avancement de notre travail à un autre public que ceux qui travaillent à l’ISTIA comme la Mairie et d’autres personnes qui s’intéressent. C’est pour cela que nous avons conçu un présentoir intéractif avec le public ainsi qu’une affiche pour présenter les grandes lignes du projet. Nous avons conçu aussi un blog où vous pouvez voir plus en détail ce que nous avons fait, et de voir la progression de notre travail.
Programmation de la main
Pour que le public puisse faire bouger la main, nous avons utilisé plusieurs moyens de communication avec la carte Arduino, micro-contrôleur. Nous avons commencé d’abord avec un clavier matriciel (keypad), puis nous avons essayé avec une télécommande infrarouge ainsi qu’une application mobile qui utilise le bluetooth. Nous avons utilisé le logiciel Qt avec comme le langage QML pour créer le programme pour l’application mobile et le langage C++ pour le clavier et la télécommande IR.
Le premier périphérique utilisé était le clavier matriciel, c’est pour cela que sur le présentoir, il y a une fente pour laisser passer les fils du clavier. On a programmé de telle sorte que quand une personne appuie sur une touche du clavier, le signal reçu par la carte Arduino soit différencié par rapport aux autres touches et qu’il soit assigné un geste précis. Il y eu un travail avant cela, qui était de matérialiser les 6 servomoteurs en un seul objet unique tel que le bras pour plus de simplicité.
Le programme est plutôt simple dans son codage mais assez encombrant dans sa réalisation.
Le deuxième système utilisé est la commande infrarouge qui permet de contrôler le bras à distance mais avec quelques inconvénients comme le fait d’être assez proche pour que cela fonctionne et être en intérieur également. Nous avons utilisé le logiciel Proteus
car le logiciel est très complet. Nous avons utilisé la librairie IR REMOTE pour la carte Arduino qui permet d’avoir les instructions pour l’utilisation de l’infrarouge avec cette carte.
Le troisième moyen de communication est l’application mobile avec un système bluetooth. Ce moyen d’intéraction est utilisé avec la carte Arduino aussi via un module Bluetooth (HC-05). La liaison entre la carte et le module est une simple liaison série qui simplifie l’utilisation avec la carte et il est donc facile de transmettre les données au bras robotique. Nous avons utilisé le logiciel Qt qui permet d’avoir un interface pour créer l’application mobile, qui facilite la création du programme. Notre application est assez simpliste mais cela fonctionne, qui est le principale avec ce que nous donnait le logiciel en version gratuite.
Présentoir, affiche et blog
Pour ce projet, nous avions une mission, pouvoir présenter ce projet à du public.
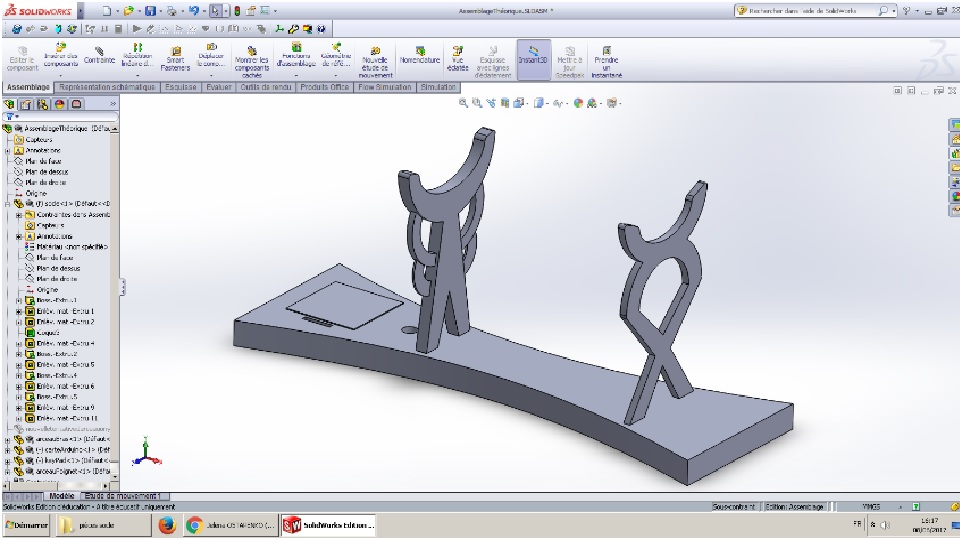
Tout d’abord pouvoir présenter le bras droit, donc nous avons conçu et fabriqué un présentoir où on y verrait le bras et on pourrait cacher les fils et la carte Arduino. Nous avons créé 2 arceaux pour soutenir le bras en plexiglas.
Le présentoir à l’état de fichier SolidWork
On voit très bien que le bras apprécie bien son présentoir
En même temps, nous devions créer une affiche à pouvoir placarder dans l’établissement pour informer un peu les étudiants ainsi que les professeurs. Nous avons commencé d’abord une affiche (haut de la page) puis nous avons compris que ce n’était pas du tout ce qui fallait donc nous en avons une autre que voici:
Puis nous nous sommes dits qu’il nous fallait de créer un blog pour qu’on puisse suivre un peu l’aventure InMooV. Ce blog est encore au niveau du commencement car le reste du travail nous prenait du temps. Vous pouvez y retrouver les programmes, tous les problèmes, toutes les étapes par lesquelles nous sommes passées, des vidéos, des photos etc … (cliquez)
Fabrication de la main gauche et son avant-bras
Nous devions aussi fabriquer la main gauche et l’avant-bras gauche du robot par impression 3D. Ce travail n’était pas le plus important si nous ne le finissions pas car le but du projet était vraiment ce qui était dit précédemment. Nous avons commencé cette fabrication car nous sommes allés assez vite sur les autres parties.
Pour fabriquer ce membre du robot, nous sommes allés sur le site où il y a toutes les parties à imprimer (vous pouvez le retrouver ici). Nous n’avons pas terminé cette partie malheureusement car l’impression des pièces est longue et n’assure pas forcément réussite à chaque coup. De plus, par rapport aux nombres d’heures consacrés pour le projet et au moment où on a commencé l’impression des pièces, le temps pour l’impression n’était pas assez. De plus, la machine a un ratio de réussite de pièce de 1/2 car nous avions souvent le même problème pendant l’impression pour la plupart des pièces : il y avait une couche dans la pièce qui ne se faisait pas ce qui fragilisait énormément la pièce, voir la cassait quand on essayait de l’enlever du support.
Voici le résultat des pièces quand l’imprimante a un problème
Et voici quand l’imprimante fait du beau travail 🙂
Mais au moment où j’écris cet article, nous avons presque totalement imprimer la main (1 pièce restante), le poignet est fini, reste plus que la moitié des pièces pour l’avant-bras. Pour l’impression, on utilisait la MakerBot qui est assez simple à utiliser mais moins précise que les 2 autres imprimantes 3D qui sont dans l’établissement. Mais cette imprimante permet d’imprimer avec plusieurs couleurs. Donc nous avons un membre très coloré avec comme couleur le bleu, le rouge, le jaune, le orange, le marron, le vert ainsi que le noir. Nous avons même testé si dans une pièce, on pouvait changer de couleur, et cela a réussi. Donc on peut carrément imprimer des pièces avec plusieurs coloris. Le seul souci est que comme l’imprimante fonctionne par couche, cela implique que les couleurs soient répartis par couche aussi.
Présentation de l’équipe
Faisons la présentation par ordre alphabétique, nous avons tout d’abord :
CANOVAS Quentin qui s’occupait de l’impression des pièces, création de l’affiche pour le projet ainsi que le blog.
En deuxième, nous avons CELLA Jérémy qui s’occupait une partie de la programmation et il s’est aussi occupé à contacter des entreprises d’impression 3D pour connaître les coûts d’impression des pièces que nous devions fabriquer.
Puis notre troisième personne, qui sans lui cela ne faisait pas un groupe de 3, RIGAL Louis qui a passé son temps dans la programmation, donc si la main fait des gestes plus ou moins compliqués, c’est énormément grâce à lui (mais n’oublions pas que nous avons tous participé).
Voici l’équipe de vainqueur qui s’occupait de ce projet. Mais ce groupe ne pouvait pas exister sans ceux qui nous ont proposé ce projet et nous ont encadré pendant tout le projet, ce sont M.Nizar CHATTI et M.Franck MERCIER. Donc un grand merci à eux.
I °) Présentation de notre groupe et de notre projet
Nous sommes un groupe de trois étudiants et dans le cadre de la 2ème année du cycle préparatoire de l’IstiA, nous avons dû choisir un projet de conception parmi les nombreux sujets proposés.
Nous avons choisi le développement d’un jeu interactif.
Le principe d’un jeu interactif est très simple; c’est un jeu vidéo classique mais durant lequel les contrôles sont assurés par l’utilisateur, non pas au moyen d’une souris, d’un clavier ou d’une manette mais grâce à ses actions physiques.
II °) Le choix du Jeu
En premier lieu nous avons dressé une liste des jeux pouvant correspondre aux jeux interactifs. En effet, il nous fallait des jeux compétitifs et avec des objectifs symétriques pour chacune des équipes. Après avoir élaboré cette liste nous avons commencé à réfléchir sur le jeu à adapter pour notre projet, Il nous fallait un jeu simple dans son déroulement et dans ses règles de façon à ne pas perdre trop de temps sur la programmation du jeu en lui même.
Nous avons rapidement pensé au jeu Pong, figure emblématique, puisque c’est l’un des premiers (1972) , des jeux vidéos.
Pong 1972
III°)Déroulement du Projet
Nous avons choisis, sur les conseils de notre tuteur de projet, Mehdi Lhommeau, de travailler avec Processing, logiciel permettant la gestion de l’Arduino de manière claire, efficace et permettant de nombreuses fonctionnalités graphiques favorisant la programmation. De plus ce dernier est accompagné d’une multitude d’exemples et de conseils disponibles gratuitement sur leur site.
Nous avons commencé par la programmation d’un Pong, relativement classique mais qui nous a permit de prendre en main le logiciel. Nous avons très rapidement poursuivi avec la création de l’interface, principalement de l’écran d’accueil ainsi que le Menu Pause.
Le jeu Pong que nous avons programmé
Après l’interface et le jeu en main, la partie la plus difficile se présentait devant notre groupe : L’intégration de l’Arduino pour rendre ce jeu vidéo, interactif.
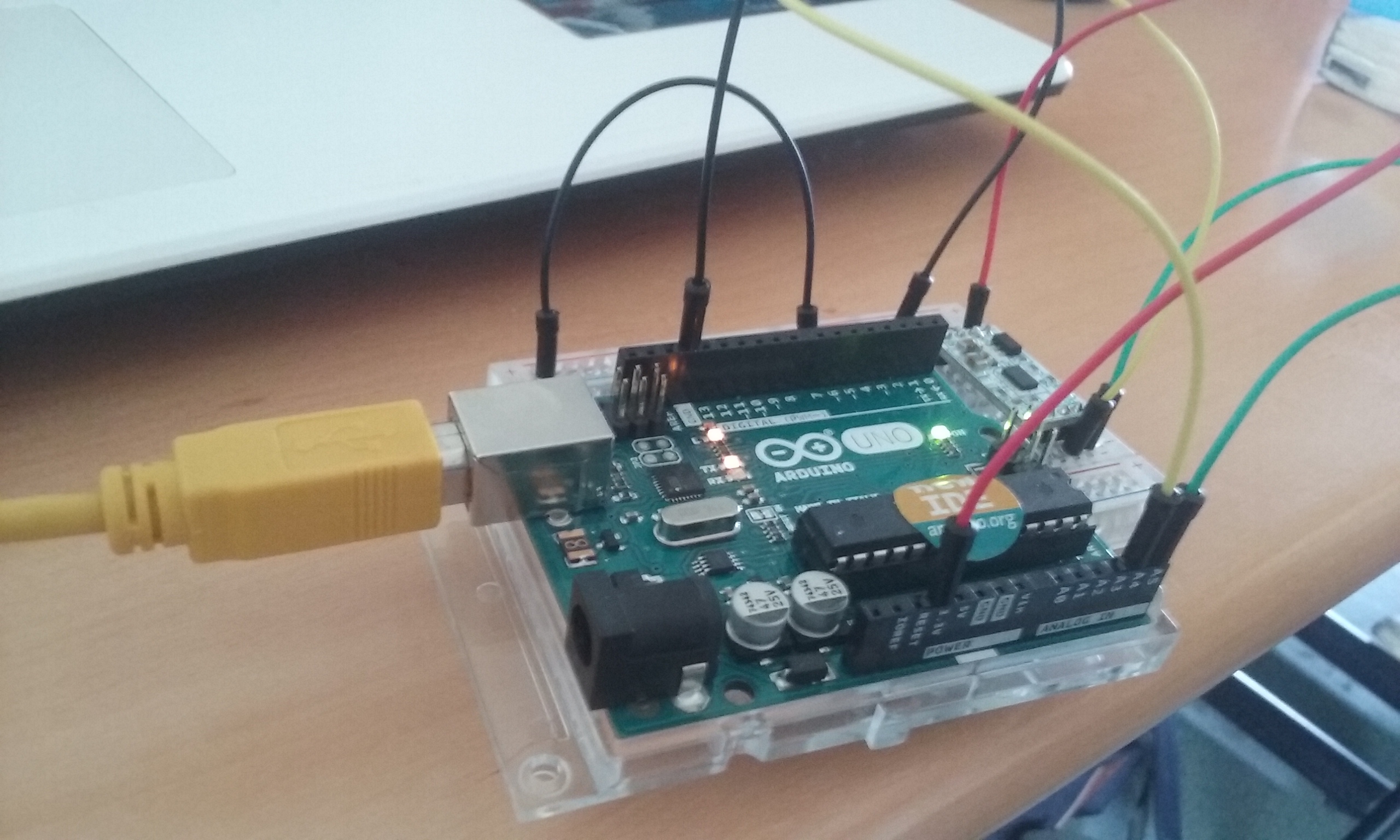
IV °) L’Arduino
Après avoir acquis les bases de l’Arduino, nous avons axé nos recherches sur les possibilités proposées par ce dernier. De nombreux périphérique sont compatibles avec l’Arduino (capteur de toucher, accéléromètre, émetteur-récepteur, buzzer) il nous fallait choisir le ou lesquels nous allions intégrer à notre Pong. Notre choix s’est très vite porté sur l’accéléromètre et sur les émetteur_récepteurs qui nous permettrait de remplir nos objectifs.
Nous avons donc commencé la recherche sur les sites de fournisseurs que notre tuteur nous avait fournis, comparé les différents avis puis notre choix s’est porté sur Conrad.fr; Nous avons passer commande puis après avoir reçu les différents composants nous nous sommes attelés a la programmation de ces derniers.
Bloc accéléromètre
Même si les différents tutoriels et aides proposés par Processing, Arduino ou d’autres sources étaient très variés et clairs, cette partie n’en resta pas moins la plus compliquée et la plus conséquente de notre projet.L’intégration des émetteurs récepteurs fut très laborieuse et nous demanda beaucoup de temps, trop pour qu’on puisse la mener à bien.
Une fois cette partie terminée, notre jeu était fonctionnel, certes reliés à un ordinateur mais fonctionnel.
V°)Création des périphériques physiques du jeu
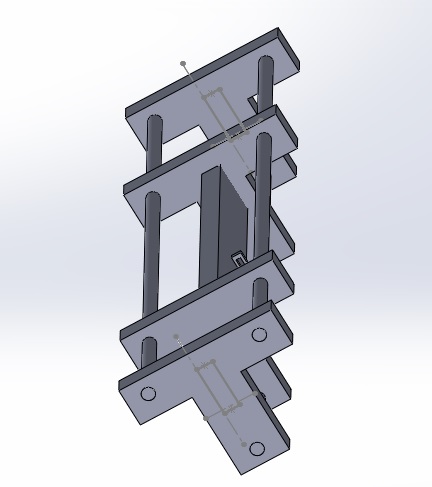
Nous avons réfléchi et crée plusieurs prototypes, ces derniers ont évolués avec les différentes contraintes lié à l’avancement et les capacités de notre projet.
Au vu des capacités de notre accéléromètre nous avons dû fixer un seul déplacement possible. Nous avons donc créé un périphérique limitant le déplacement tout en conservant l’aspect ludique.
Version Finale
Prototype 1
Nous vous remercions de votre lecture, et déposons ci-dessous le lien vers notre rapport de projet, plus complet et plus détaillé pour celles et ceux qui veulent en savoir plus.