Nous sommes, Adrien et Alexandra, 2 étudiants en deuxième année de cycle préparatoire à l’ISTIA (école d’ingénieurs de l’université d’Angers) et aujourd’hui nous allons vous présenter notre projet de conception. Tout d’abord qu’est-ce que ce le robot InMoov ?
extrait du site http://inmoov.fr/gallery-v2/
InMoov est un robot humanoïde simple que vous pouvez imprimer en 3D de chez vous ! Toutes les pièces sont téléchargeables sur son site et il ne vous reste plus qu’à le monter !
Mais pour nous le projet consistait à télécharger ces pièces, les assembler sur le logiciel Blender puis l’animer au sein de Unity 3D. Et en objectif final de notre projet de créer une banque de données pour permettre à des 4èmes du collège Rabelais de le personnaliser en changeant ses couleurs à volonté.
Assemblage des différentes pièces du Robot sous Blender
Nous avons eu la chance de pouvoir récupérer une partie de l’assemblage auprès de M.Richard notre tuteur, ce qui nous a permis de gagner un peu de temps, ainsi nous n’avons eu besoin que de lui rajouter son dos.
Animation sous Unity 3D
C’était la partie la plus importante et la plus conséquente de notre projet. En effet, après une étude rapide de son anatomie et en consultant notre tuteur, la décision a été prise de l’animer avec des forces par le biais de joints entre chaque partie de son corps. Comme Unity 3D est un logiciel qui permet de recréer un univers virtuel, l’ajout de forces sur son corps à certaines limites. Rien que le fait de le faire tenir debout et de compenser la force de gravité n’est pas une mince affaire ! Mais nous avons tout de même réussi à lui faire faire des mouvements simples,comme bouger la bouche pour simuler la parole, bouger la tête ou encore lever les bras.
Personnalisation du robot
Pour finir, nous avons mis à disposition une banque de matériaux (principalement des couleurs et des textures) pour pouvoir personnaliser l’aspect extérieur au goût de chacun !
Si vous souhaitez avoir plus d’information sur notre démarche n’hésitez pas à nous contacter (alexandra.dion@etud.univ-angers.fr ou adrien.mortreau@etud.univ-angers.fr)
Merci pour votre intérêt et bonne journée à vous !
Nous sommes 3 étudiants en classe préparatoire à l’ISTIA en seconde année et nous étions sur le projet InMooV.
Qu’est-ce que InMooV ?
InMooV est un projet créé par Gaël LANGEVIN, un français designer et sculpteur. C’est un projet en open-source sur Internet et vous pouvez retrouver le tout sur ce site. C’est la possibilité de créer un robot humanoïde de taille humaine grâce à une petite imprimante 3D (12*12*12cm) chez soi. De plus en plus, l’imprimante 3D se démocratise,et il a créé ce projet sur les bases du partages et de la communauté.
http://inmoov.fr/gallery-v2/
C’est quoi ce projet ?
Ce projet nous a été présenté par des professeurs de l’ISTIA, et c’est même un projet que la Mairie d’Angers finance. C’est de pouvoir fabriquer un robot humanoïde et de le faire fonctionner.
Notre projet de 2ème année était de prendre en “main” l’avant-bras et la main droite qui ont été créés auparavant, et de pouvoir créer un programme qui puisse faire bouger la main et qu’elle fasse des gestes plus ou moins simple. Par exemple, on peut lui faire faire le jeu du pierre,feuille,ciseaux, d’ouvrir et de fermer la main comme si il compressait quelque chose et d’autres gestes encore. Nous devions aussi pouvoir présenter l’avancement de notre travail à un autre public que ceux qui travaillent à l’ISTIA comme la Mairie et d’autres personnes qui s’intéressent. C’est pour cela que nous avons conçu un présentoir intéractif avec le public ainsi qu’une affiche pour présenter les grandes lignes du projet. Nous avons conçu aussi un blog où vous pouvez voir plus en détail ce que nous avons fait, et de voir la progression de notre travail.
Programmation de la main
Pour que le public puisse faire bouger la main, nous avons utilisé plusieurs moyens de communication avec la carte Arduino, micro-contrôleur. Nous avons commencé d’abord avec un clavier matriciel (keypad), puis nous avons essayé avec une télécommande infrarouge ainsi qu’une application mobile qui utilise le bluetooth. Nous avons utilisé le logiciel Qt avec comme le langage QML pour créer le programme pour l’application mobile et le langage C++ pour le clavier et la télécommande IR.
Le premier périphérique utilisé était le clavier matriciel, c’est pour cela que sur le présentoir, il y a une fente pour laisser passer les fils du clavier. On a programmé de telle sorte que quand une personne appuie sur une touche du clavier, le signal reçu par la carte Arduino soit différencié par rapport aux autres touches et qu’il soit assigné un geste précis. Il y eu un travail avant cela, qui était de matérialiser les 6 servomoteurs en un seul objet unique tel que le bras pour plus de simplicité.
Le programme est plutôt simple dans son codage mais assez encombrant dans sa réalisation.
Le deuxième système utilisé est la commande infrarouge qui permet de contrôler le bras à distance mais avec quelques inconvénients comme le fait d’être assez proche pour que cela fonctionne et être en intérieur également. Nous avons utilisé le logiciel Proteus
car le logiciel est très complet. Nous avons utilisé la librairie IR REMOTE pour la carte Arduino qui permet d’avoir les instructions pour l’utilisation de l’infrarouge avec cette carte.
Le troisième moyen de communication est l’application mobile avec un système bluetooth. Ce moyen d’intéraction est utilisé avec la carte Arduino aussi via un module Bluetooth (HC-05). La liaison entre la carte et le module est une simple liaison série qui simplifie l’utilisation avec la carte et il est donc facile de transmettre les données au bras robotique. Nous avons utilisé le logiciel Qt qui permet d’avoir un interface pour créer l’application mobile, qui facilite la création du programme. Notre application est assez simpliste mais cela fonctionne, qui est le principale avec ce que nous donnait le logiciel en version gratuite.
Présentoir, affiche et blog
Pour ce projet, nous avions une mission, pouvoir présenter ce projet à du public.
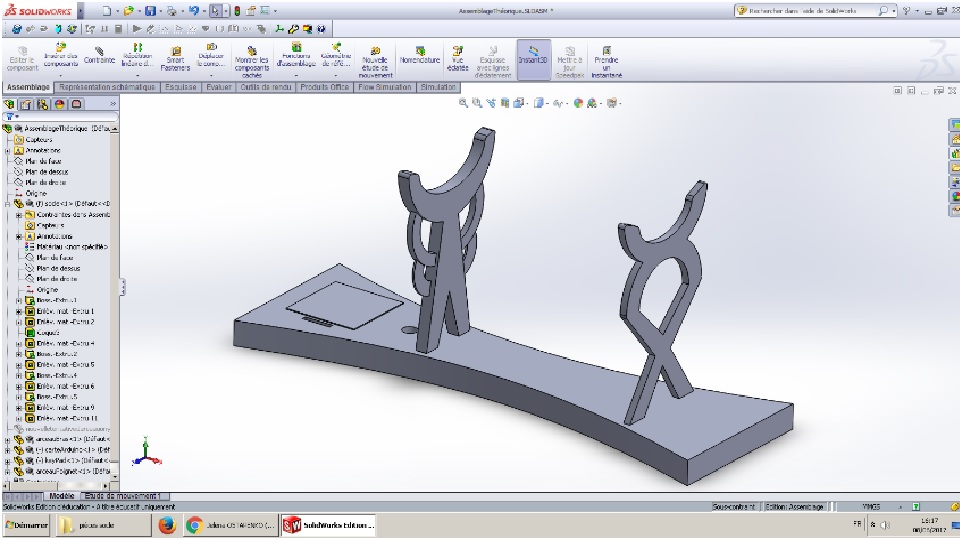
Tout d’abord pouvoir présenter le bras droit, donc nous avons conçu et fabriqué un présentoir où on y verrait le bras et on pourrait cacher les fils et la carte Arduino. Nous avons créé 2 arceaux pour soutenir le bras en plexiglas.
Le présentoir à l’état de fichier SolidWork
On voit très bien que le bras apprécie bien son présentoir
En même temps, nous devions créer une affiche à pouvoir placarder dans l’établissement pour informer un peu les étudiants ainsi que les professeurs. Nous avons commencé d’abord une affiche (haut de la page) puis nous avons compris que ce n’était pas du tout ce qui fallait donc nous en avons une autre que voici:
Puis nous nous sommes dits qu’il nous fallait de créer un blog pour qu’on puisse suivre un peu l’aventure InMooV. Ce blog est encore au niveau du commencement car le reste du travail nous prenait du temps. Vous pouvez y retrouver les programmes, tous les problèmes, toutes les étapes par lesquelles nous sommes passées, des vidéos, des photos etc … (cliquez)
Fabrication de la main gauche et son avant-bras
Nous devions aussi fabriquer la main gauche et l’avant-bras gauche du robot par impression 3D. Ce travail n’était pas le plus important si nous ne le finissions pas car le but du projet était vraiment ce qui était dit précédemment. Nous avons commencé cette fabrication car nous sommes allés assez vite sur les autres parties.
Pour fabriquer ce membre du robot, nous sommes allés sur le site où il y a toutes les parties à imprimer (vous pouvez le retrouver ici). Nous n’avons pas terminé cette partie malheureusement car l’impression des pièces est longue et n’assure pas forcément réussite à chaque coup. De plus, par rapport aux nombres d’heures consacrés pour le projet et au moment où on a commencé l’impression des pièces, le temps pour l’impression n’était pas assez. De plus, la machine a un ratio de réussite de pièce de 1/2 car nous avions souvent le même problème pendant l’impression pour la plupart des pièces : il y avait une couche dans la pièce qui ne se faisait pas ce qui fragilisait énormément la pièce, voir la cassait quand on essayait de l’enlever du support.
Voici le résultat des pièces quand l’imprimante a un problème
Et voici quand l’imprimante fait du beau travail 🙂
Mais au moment où j’écris cet article, nous avons presque totalement imprimer la main (1 pièce restante), le poignet est fini, reste plus que la moitié des pièces pour l’avant-bras. Pour l’impression, on utilisait la MakerBot qui est assez simple à utiliser mais moins précise que les 2 autres imprimantes 3D qui sont dans l’établissement. Mais cette imprimante permet d’imprimer avec plusieurs couleurs. Donc nous avons un membre très coloré avec comme couleur le bleu, le rouge, le jaune, le orange, le marron, le vert ainsi que le noir. Nous avons même testé si dans une pièce, on pouvait changer de couleur, et cela a réussi. Donc on peut carrément imprimer des pièces avec plusieurs coloris. Le seul souci est que comme l’imprimante fonctionne par couche, cela implique que les couleurs soient répartis par couche aussi.
Présentation de l’équipe
Faisons la présentation par ordre alphabétique, nous avons tout d’abord :
CANOVAS Quentin qui s’occupait de l’impression des pièces, création de l’affiche pour le projet ainsi que le blog.
En deuxième, nous avons CELLA Jérémy qui s’occupait une partie de la programmation et il s’est aussi occupé à contacter des entreprises d’impression 3D pour connaître les coûts d’impression des pièces que nous devions fabriquer.
Puis notre troisième personne, qui sans lui cela ne faisait pas un groupe de 3, RIGAL Louis qui a passé son temps dans la programmation, donc si la main fait des gestes plus ou moins compliqués, c’est énormément grâce à lui (mais n’oublions pas que nous avons tous participé).
Voici l’équipe de vainqueur qui s’occupait de ce projet. Mais ce groupe ne pouvait pas exister sans ceux qui nous ont proposé ce projet et nous ont encadré pendant tout le projet, ce sont M.Nizar CHATTI et M.Franck MERCIER. Donc un grand merci à eux.