

Le projet « Art Cinétique » nous a permis de penser et réaliser plusieurs œuvres dynamiques en Lego. Pour chaque création, nous avons effectué des recherches en amont afin de rendre possible l’animation du mobile à l’aide du mécanisme adapté. Pour permettre cette mise en mouvement, nous avions à notre disposition différents types de moteurs Lego permettant de faire varier rotation et puissance. Nous avons aussi créé un boitier de type « brique intelligente » sur le modèle de celles créées par Lego en programmant différentes fonctionnalités comme le sens de rotation.
Nous allons donc vous présentez les principaux axes de notre projets…
- Reproduction d’une structure
- Création d’un boîtier d’alimentation-commande
- Réflexion sur la motorisation des structures
- Création de structures différemment motorisées
Reproduction d’une structure
Nous avons tenté de mettre en mouvement un petit mobile pour comprendre à quel types de problématiques nous aurions à faire face. Cela nous a permis de nous faire une idée de la puissance dont nous aurions besoin et des différentes fonctionnalités qui pourraient être intéressantes à intégrer aux œuvres finales. Ainsi, nous avons décidé de faire un avion sur lequel se trouvait un personnage et qui tournait autour d’un arbre. Nous avons utilisé une vis sans fin reliée à une roue afin de changer l’orientation initiale de la rotation du moteur. Une fois la base permettant à la structure de tenir droite créée, nous avons lancé le moteur pour s’assurer que le mouvement correspondait bien à nos attentes. La réalisation de cette première structure nous a donné une idée des différentes parties à intégrer aux prochaines créations : une tige permettant d’assembler le moteur, des engrenages et des vis pour changer les caractéristiques de la rotation et enfin la figure que nous souhaitons mettre en mouvement.

Création d’un boîtier d’alimentation-commandé
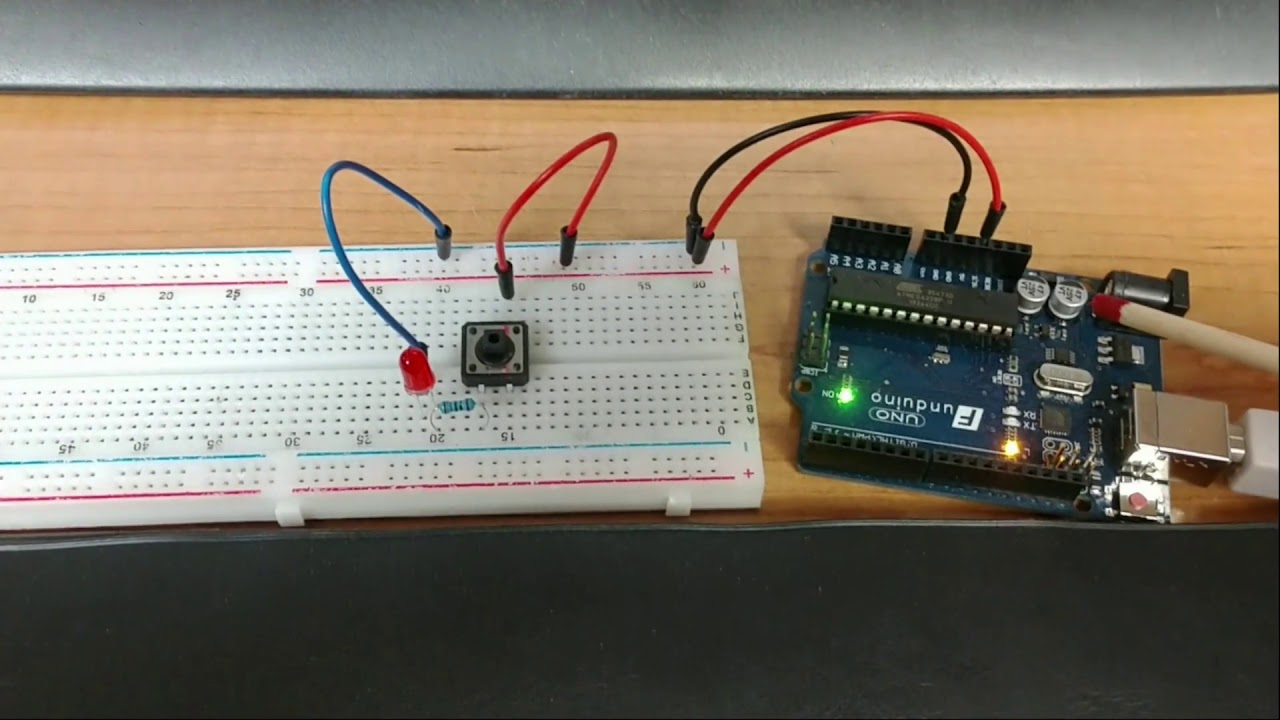
Cette partie du projet fût sans doute la partie qui se rapproche le plus du milieu de l’ingénierie, car nous avons dû créer un boitier qui permet d’alimenter un moteur en 9 volts ainsi que de changer sa direction et sa vitesse. Pour ce faire nous étions épaulé par M. Verron, qui nous a lancé sur plusieurs pistes. L’une de ces pistes a été notre point de départ ; l’obtention d’une plaque Arduino Uno qui permet de contrôler des composants électroniques. Nous avons donc ensuite acheté et trouvé les autres pièces nécessaires (potentiomètre, bouton, câble, boitier 6 piles) et nous avons pu commencer le montage. Avant de tester notre circuit électronique et d’estimer sa taille pour de construire la structure du boitier, nous avons utilisé une breadboard où nous avons pu tester tous ces branchements ainsi que notre code. Cette plaque Arduino permet de contrôler des composants électroniques mais pour ce faire il faut bien sûr écrire un code qui lui dise quoi faire !

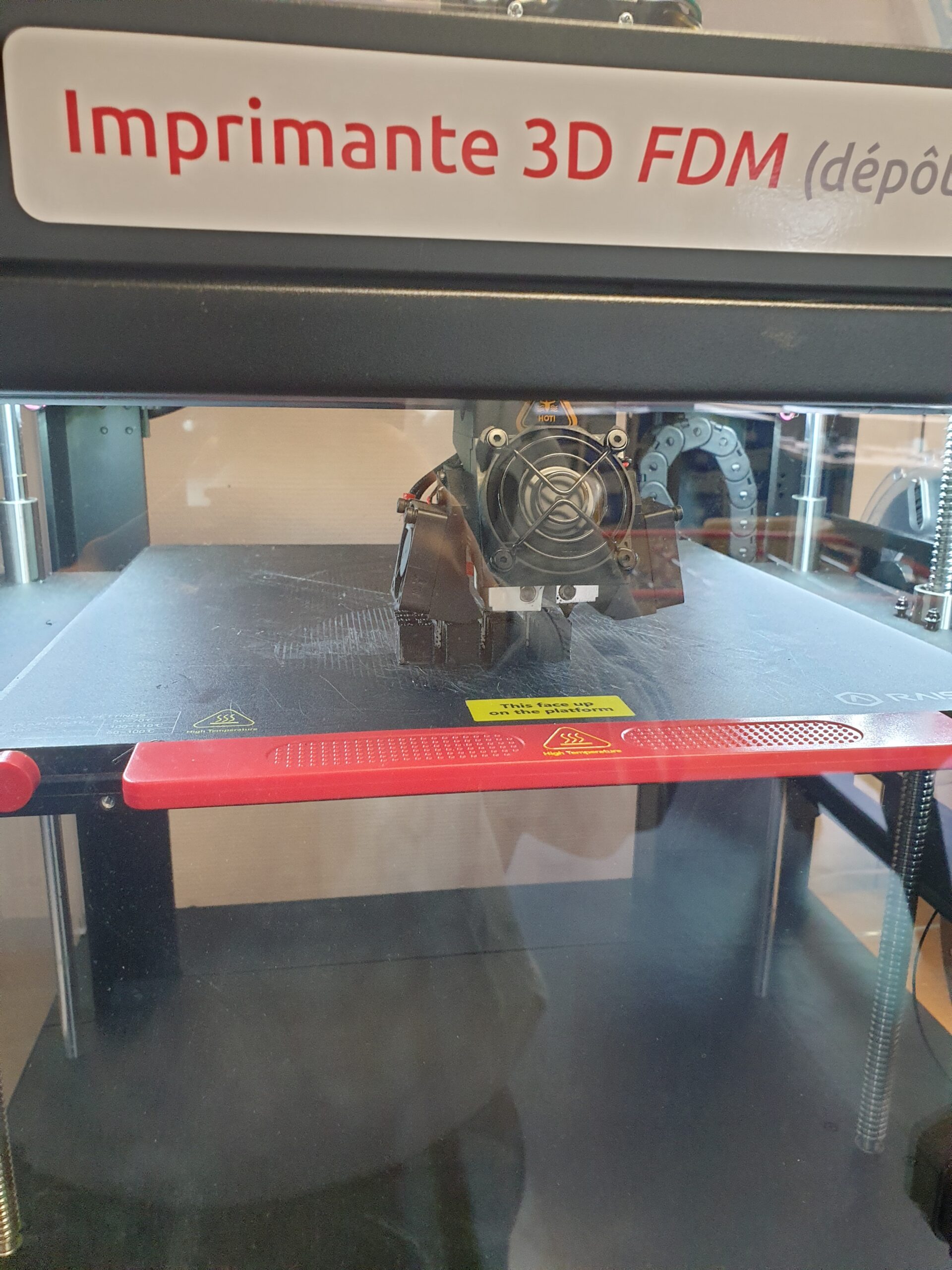
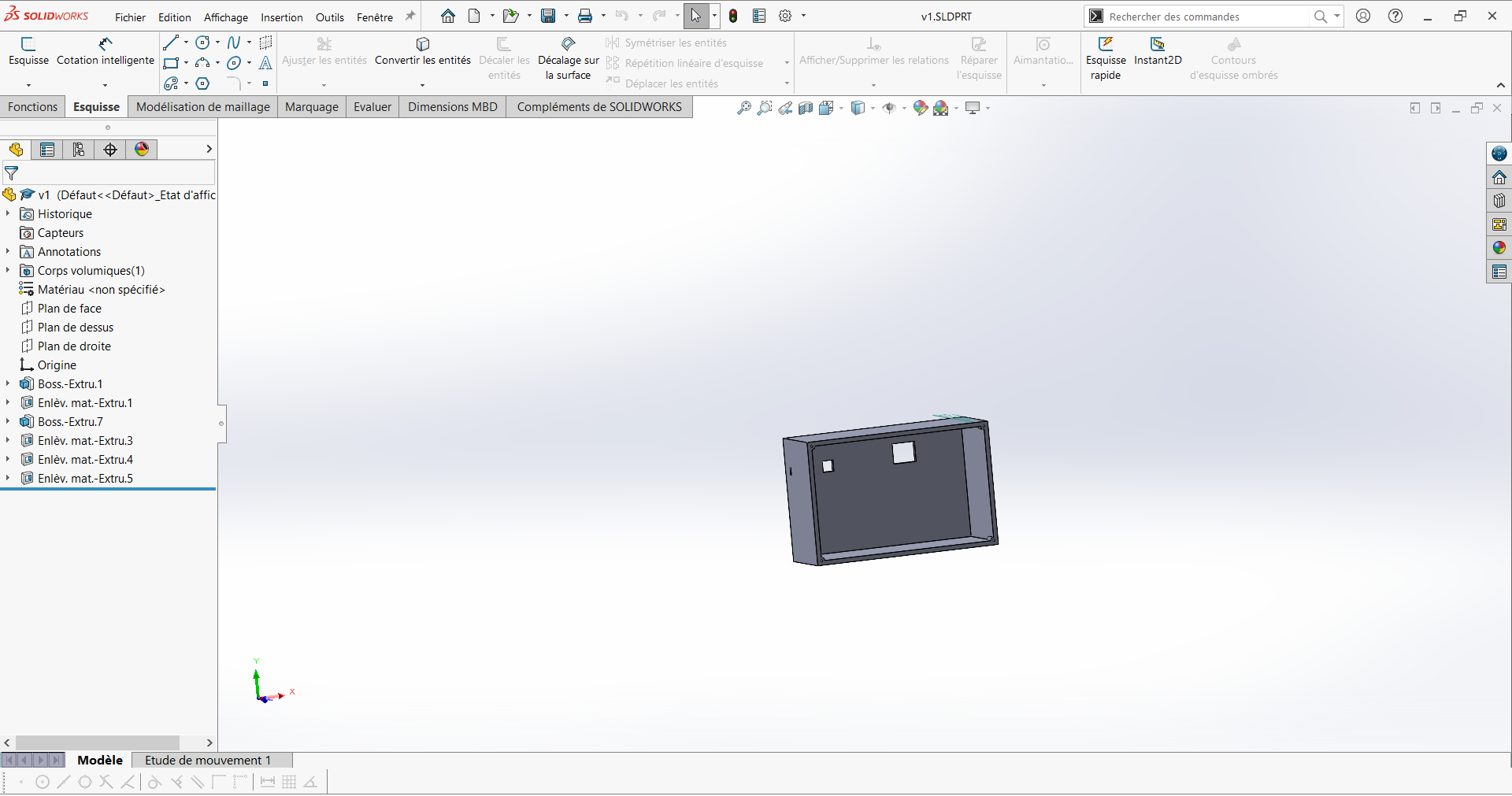
Lorsque nous avons fini tous ces tests nous nous sommes lancés dans la création de la structure du boitier, pour ce faire nous avons décidé de modéliser notre pièce sur SolidWorks, un logiciel de CAO. Une fois les pièces définies sur ce logiciel nous les avons imprimées grâce à une imprimante 3D. Cela à pris environ 15 h !
A ce stade il ne nous restait plus qu’une étape, mettre le circuit électronique dans le boitier vide et assembler tout le circuit de manière définitive en soudant fils et composants avec de l’étain. Cette méthode de soudage à l’étain est très pratique et très répandue, elle nous a permis de souder tout nos composants ente eux par l’intérim de fils conducteurs.


Le boitier est donc maintenant fini et nous allons pouvoir l’utiliser pour alimenter le moteur qui animera nos figures.

Réflexion sur la motorisation des structures
En ce qui concerne la motorisation, nous avons réaliser différentes structures animées par un moteur électrique, qui s’est révélé être le plus pratique en raison de sa rotation régulière et constante. De plus, ce type de moteur offre une puissance suffisante mais aussi variable, grâce au boitier que nous avons réalisé, pour faire fonctionner une grande diversité de figures.
En ce qui concerne un nouveau mode de motorisation, nous avons trouvé la solution du moteur à friction. Ce moteur est alimenté manuellement en compressant un ressort pour le charger. Cette action comprime donc un ressort qui, une fois relâché, produit un mouvement de rotation. Ce mouvement généré par ce moteur est similaire à celui du moteur électrique, mais il est beaucoup moins pratique en raison de son manque de puissance. De plus ce mouvement n’est pas fluide, au contraire il est explosif et rapide car le ressort se décompresse rapidement et brusquement.
Ensuite, nous avons envisagé une troisième solution de motorisation, mais après plusieurs recherches infructueuses, nous avons conclu que la solution résidait dans l’énergie manuelle. Nous avons donc simplement ajouté une poignée à la figure “Hoberman Mechanism 2” que nous n’arrivions pas à faire tourner avec un moteur. Nous avons adapté la figure en lui ajoutant une poignée pour la tenir à la main et la faire tourner manuellement.

Création de structures différemment motorisées
Nous avons abouti à trois structures différemment motorisées.
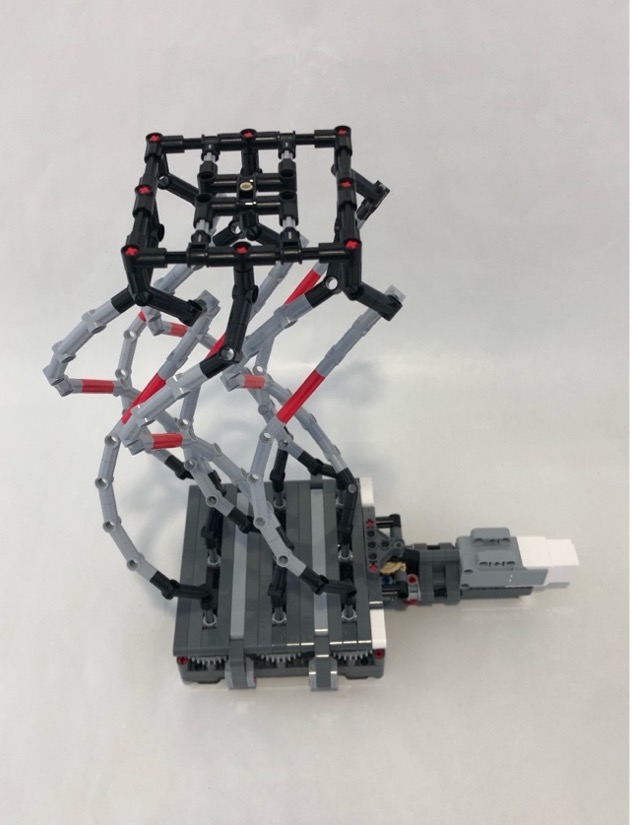
La première figure est “Slithy Toves“. Elle consiste en plusieurs branches qui se tiennent sur une base munie d’engrenages. Cette figure est assez impressionnante car les branches s’entrecroisent constamment mais ne se bloquent jamais dans leur rotation. Pour mettre en mouvement cette structure, nous avons utilisé le “Servomoteur moyen EV3 LEGO Mindstorm” qui est un moteur avec une puissance moyenne permettant de faire une rotation de manière simple.
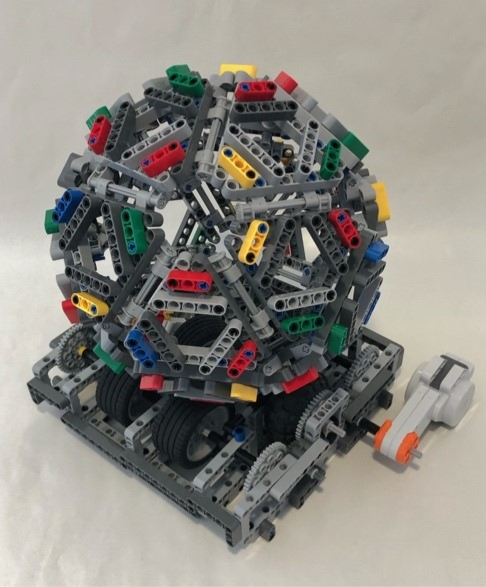
La seconde figure réalisée est le “Regular Isocahedron“. Nous avons choisi de faire une figure de plus grande ampleur afin d’utiliser le “Grand servomoteur EV3 LEGO Mindstorms” qui fournit une puissance plus importante et permet donc de soutenir une plus grosse structure. Cette figure est composée de deux éléments : la base et la balle. La base nous a demandé beaucoup de réflexion car il fallait mettre en mouvement six roues à l’aide d’engrenages et faire en sorte que la balle puisse tenir dessus sans s’échapper. Une fois cette étape et la balle finie, nous avons pu mettre en mouvement le moteur ce qui a permit à la balle de tourner sur elle-même tout en restant en place sur la base.
Enfin, la dernière figure que nous avons réalisé est le “Hoberman Mechanism 2“. Après avoir tenté de la mettre en mouvement avec différents moteurs, nous avons décidé d’utiliser l’énergie manuelle. Ainsi, nous avons placé une manivelle en dessous pour permettre aux engrenages de faire s’ouvrir et se fermer la rosasse.
Le +
Un atelier a été organisé pour les élèves de maternelle. Ils ont pu expérimenter avec nos différents moyens de motorisation, apprendre en s’amusant avec les roues et voir les structures que nous avions réalisées. Notre projet ayant pour finalité une création artistique et donc voué au partage, cela était plaisant et plein de sens de leur présenter. Le côté ludique de ce projet était un lien idéal entre une entreprise de futurs ingénieurs et un regard d’enfant !
Bilan
Ce projet a été pour nous une occasion d’exprimer notre créativité tout en apprenant de nouveaux savoirs. Notamment de mieux comprendre les enjeux derrière l’animation de structures et les problèmes qui en découlent (masse, frottement, contrainte physique…). Il nous a aussi permis d’apprendre à travailler en groupe et de nous organiser en nous répartissant les tâches en fonction des envies et des qualités des personnes. Pour conclure, ce projet riche en créativité nous a grandi intellectuellement et humainement.
Nous avons réalisé une vidéo afin que vous puissiez voir nos figures en mouvement :
Merci d’avoir lu cet article ! Nous espérons que votre projet vous a plu !