
Bonjour à toutes et à tous !
Introduction
Nous sommes Esteban Cornu, Mattéo Jupille et Alexis Maupas des élèves en deuxième année de cycle préparatoire ingénieur et nous allons vous présenter notre projet intitulé “Système de stationnement automatisé sur Arduino”. Ce projet nous a vraiment attiré lors de la sélection car il correspond au domaine dans lequel nous souhaitons évoluer dans le cycle d’ingénieur. En effet, le projet possède toute une partie basée sur la programmation qui fait écho à la filière SAGI ainsi que sur la partie qualité, innovation et fiabilité qui nous initie à la filière QIF.
Le but est dans un premier temps de découvrir l’Arduino sur laquelle aucun de nous n’avait travaillé auparavant, mais nous étions tous impatients de commencer. Dans un second temps, le projet a permis de nous faire découvrir toutes les étapes à suivre pour mener à bien un projet. Pour cela, il faut s’organiser en répartissant correctement les tâches au sein du groupe dans le but d’être plus efficace. Tout au long du projet nous avons été épaulés par Monsieur Haddad.
Objectifs du projet
- Trouver un moyen pour rendre un parking autonome
- Concevoir et Programmer un parking situé en plein cœur d’une ville
- Réaliser une maquette fonctionnelle de ce parking
Travail réalisé
1. Etude d’automatisation
Nous avons établi trois possibilités pour réaliser ce parking automatisé. La première option consiste à utiliser une carte Arduino avec deux caméras à reconnaissance de plaque d’immatriculation. La deuxième sollicite une carte Arduino avec des capteurs optiques et la dernière se compose d’une carte Raspberry Pi avec deux caméras à reconnaissance de plaque.
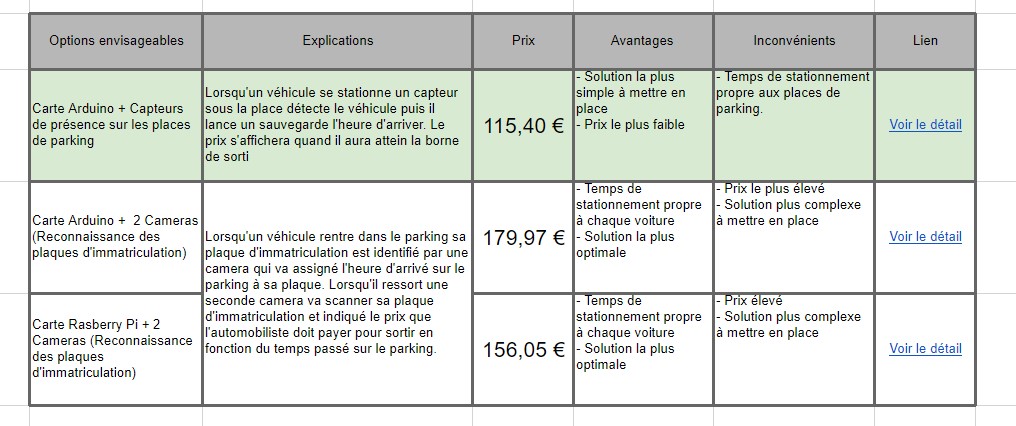
Après avoir comparé les 3 alternatives en fonction du prix, de la fiabilité, de la complexité nous avons retenu la deuxième option.
Explication du fonctionnement :
Un écran LCD indique le nombre de places restantes si le nombre de place est supérieur à 0 alors un véhicule peut rentrer. Des capteurs optiques placés sous le sol avant et après la barrière vérifient si la voiture est bien rentrée avant de refermer la barrière. La barrière s’ouvre et se ferme à l’aide d’un servomoteur. Puis la voiture peut se garer sur n’importe quelle place libre. Pour aider le conducteur nous avons placés des LED vertes et rouges au bout de chaque place. Si la LED est verte alors la place est libre, elle passera au rouge lorsque le véhicule sera bien garé au-dessus du capteur optique présent sur chaque place. A chaque fois qu’une voiture se gare un chronomètre associé à la place est lancé ce qui permet de vérifier le temps passé dans le parking. Lorsqu’un automobiliste décide de partir, l’écran affiche le prix à payer en fonction du chronomètre lié à sa place puis il peut partir par la barrière de sortie fonctionnant de la même manière que celle d’entrée.
2. Conception du parking
A. Agencement Parking
Nous devions ensuite imaginer l’agencement des places de parking ainsi que la position des barrières d’entré et de sortie mais aussi prévoir un emplacement pour cacher la carte Arduino.
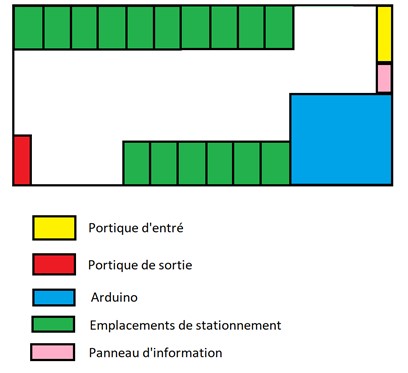
Nous avons ajouté deux places de parking pour personnes à mobilité réduite selon l’arrêté du 1er août 2006 en respectant les normes.
Le temps était maintenant venu pour nous de réaliser ce parking en 3D à l’aide du logiciel en ligne OnShape en taille réelle. Cette étape a pour but de nous aider à dimensionner le projet mais aussi de nous projeter dans le futur pour connaitre précisément l’emplacement de chaque composant.
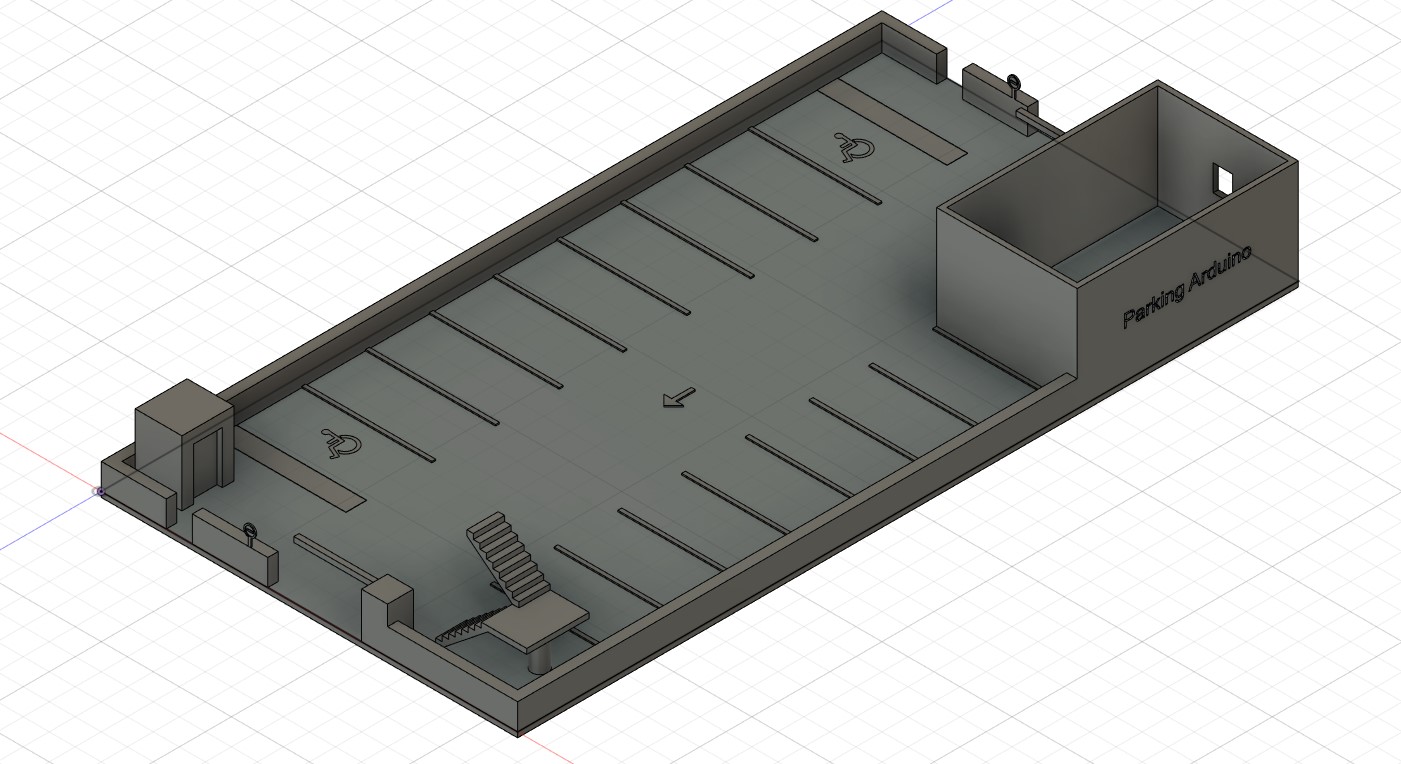
Parking de 30m x 16m
B. Programmation
Afin de pouvoir contrôler tous les composants nous avons utilisé une carte Arduino MEGA car il fallait beaucoup d’entrées analogiques pour les capteurs optiques ainsi que beaucoup de sorties digitales pour contrôler chaque LED.
Sachant que nous attendions la livraison des composants nous en avons profité pour réaliser des tests sur le logiciel en ligne TinkerCad qui permet de simuler une carte Arduino pour venir y connecter des composants eux aussi virtuels. Ces nombreux tests nous ont permis de comprendre le fonctionnement de chaque composant ainsi que la manière de le brancher à la carte. Nous avons donc utilisé les librairies ServoMoteur et LiquidCrystal pour contrôler la barrière et l’écran LCD facilement. Cette étape nous a fait gagner beaucoup de temps car dès la réception des composants nous avons pu passer à la réalisation sans trop se soucier si le parking fonctionnera une fois l’assemblage des pièces 3D et de la planche en bois terminé.
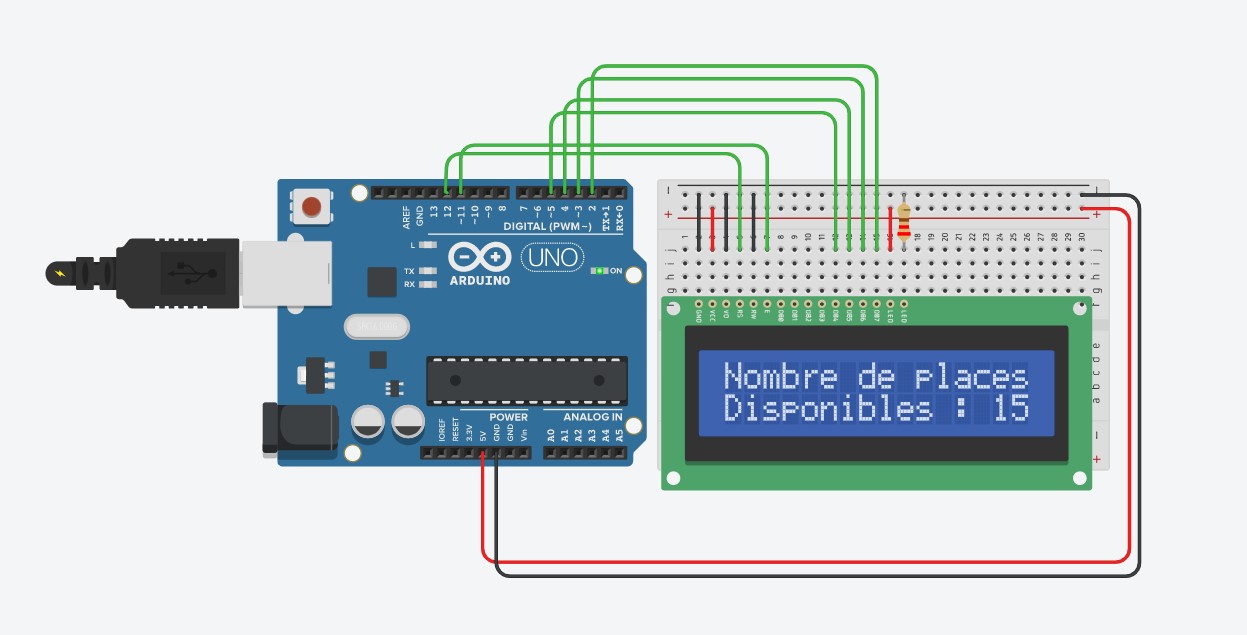
TinkerCad-LCD
3. Réalisation de la maquette
La réalisation de la maquette à commencer lorsque nous avons reçu nos composants. Nous avons d’abord tracé l’emplacement de chaque élément (places, pièces 3D, …) pour ensuite commencer à découper la planche.
 Découpage de la planche |
 Perçage de la planche |
 Soudure des composants |
Après le découpage et le percage de la planche nous avons placé tous les composants ainsi que tous les pièces 3D.
L’étape suivant était de souder tous les composants entre eux afin de les connecter à la carte Arduino ce fut très long et périlleux en raison du nombre de composants à alimenter.
Nous avons ajoutés quelques détails comme les panneaux de sens interdit et les signalisations pour les places handicapées.
Résultat final
Conclusion
Pour conclure, nous sommes très reconnaissants d’avoir participé à ce projet pour clôture notre deuxième année préparatoire. En effet, nous avons pu découvrir ou approfondir plusieurs domaines comme la programmation Arduino, la conception assistée par ordinateur, la gestion du temps, la fabrication d’une maquette fonctionnelle, … En plus des connaissances, nous avons appris à concevoir de A à Z un projet ce qui va beaucoup nous aider dans nos futures missions en tant qu’étudiant en école d’ingénieur. Nous sommes très fiers car nous considérons avoir réussi à répondre correctement au cahier des charges en essayant d’innover. Nous profitons de cette conclusion pour remercier Monsieur Haddad pour nous avoir accompagné à concevoir ce projet.
| Esteban Cornu | Mattéo Jupille | Alexis Maupas |