
Conception de pièces de liaisons adaptables sur pièces LEGO®
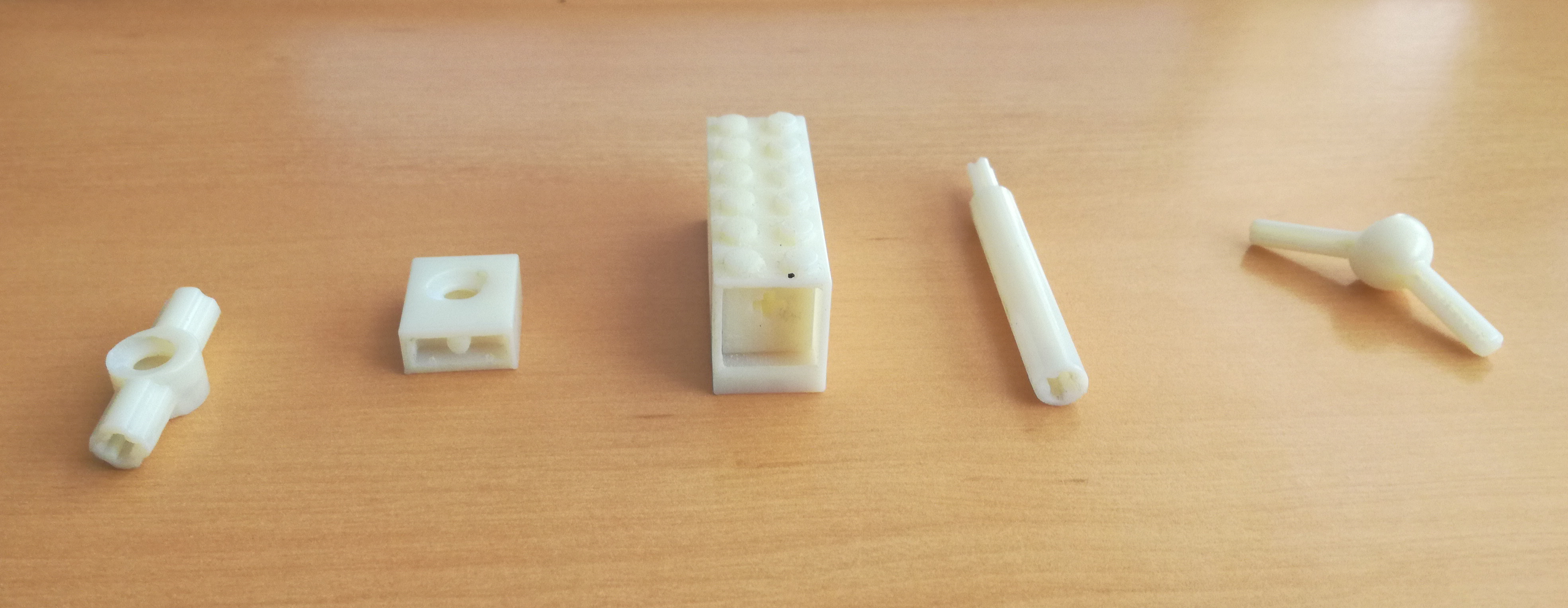
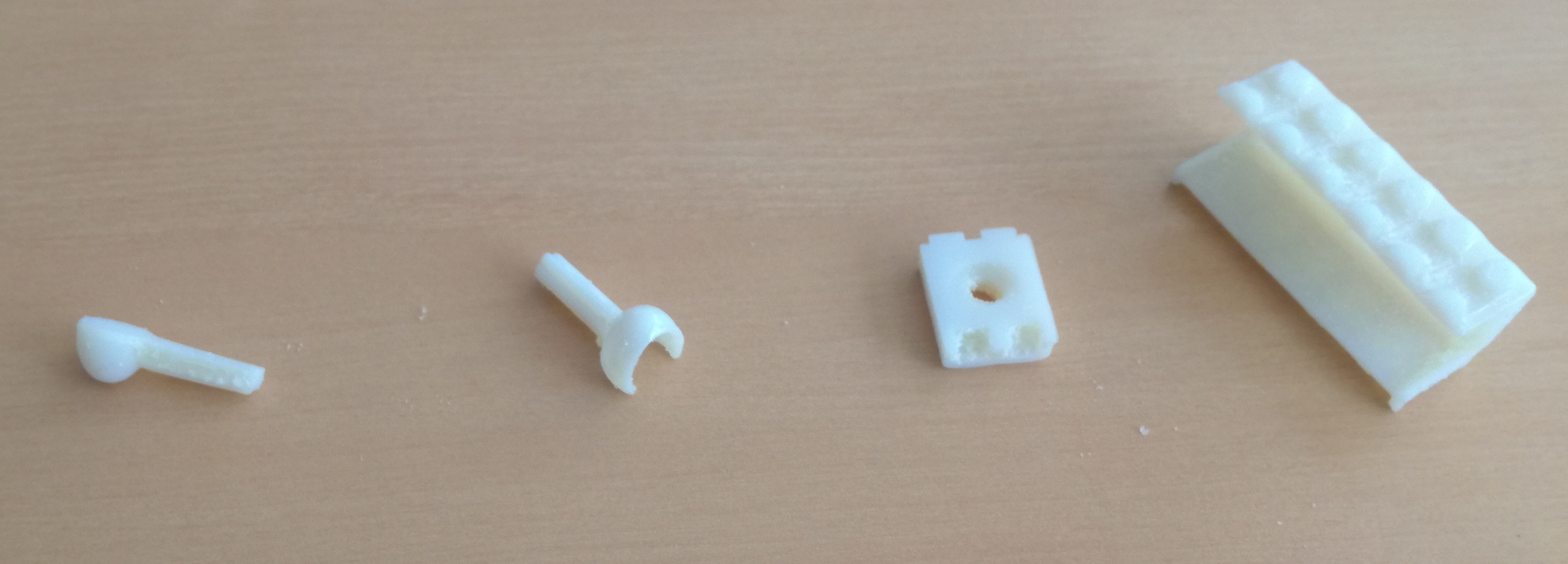
Rendu final des pièces
Ce projet Ei2 sur les liaisons mécaniques LEGO® s’inscrit dans le cadre de notre 4ème semestre, dans l’unité d’étude n°5 : Projets de conception.
Il fait suite aux difficultés rencontrées lors des cours de Génie Mécanique de 3ème année qui utilisaient les LEGO® afin de faciliter la compréhension des schémas cinématiques : en effet certaines liaisons n’étaient pas réalisables de façon simple.
Il s’agit là donc de travailler sur des LEGO® : quoi de plus amusant que ça ?
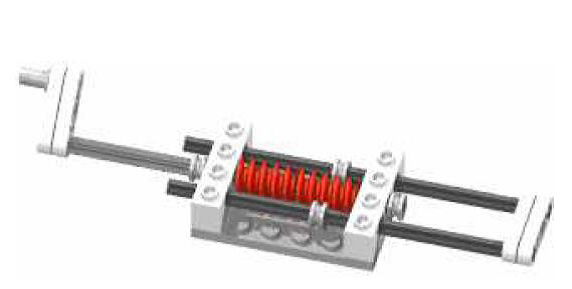
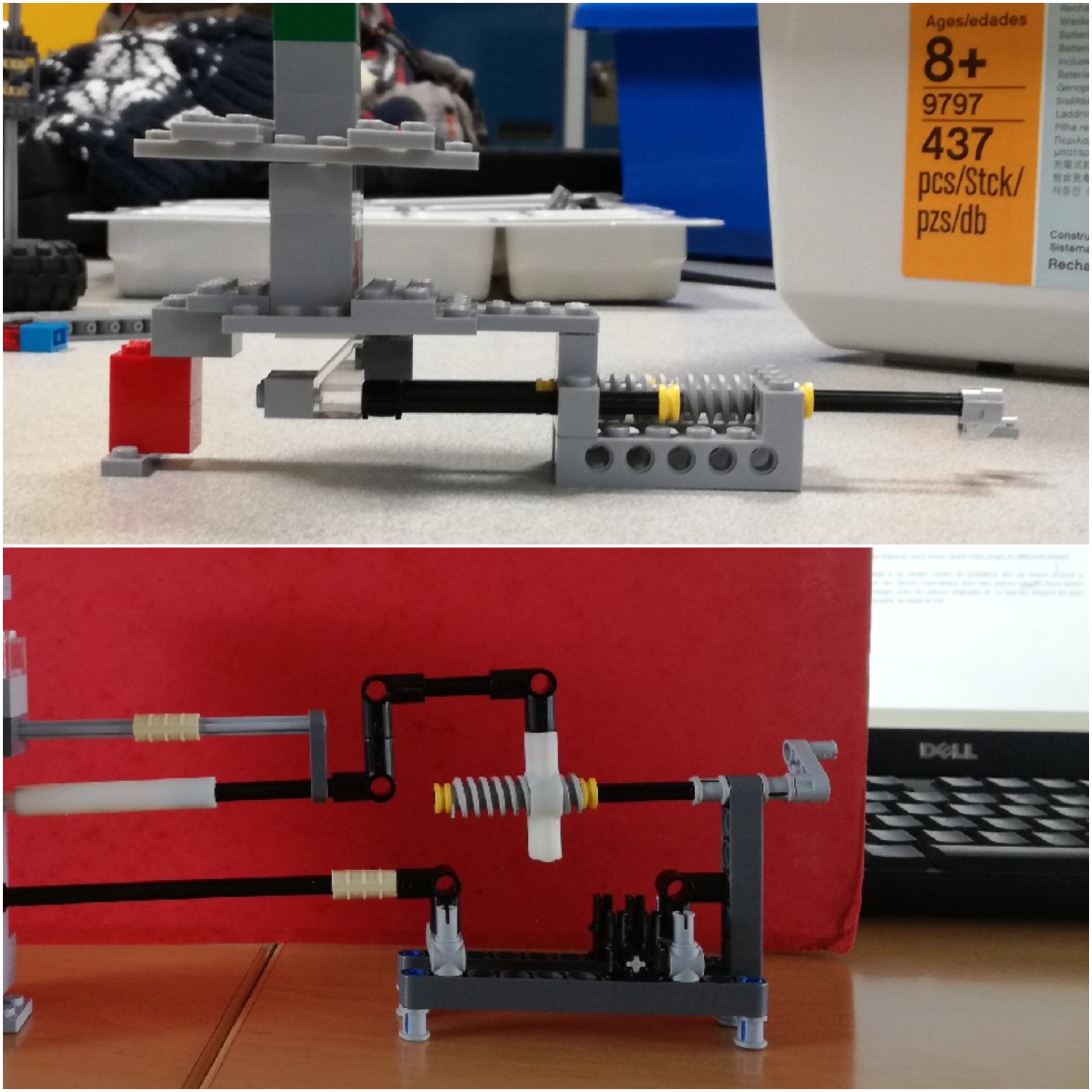
Modélisation complexe d’une liaison hélicoïdale en LEGO
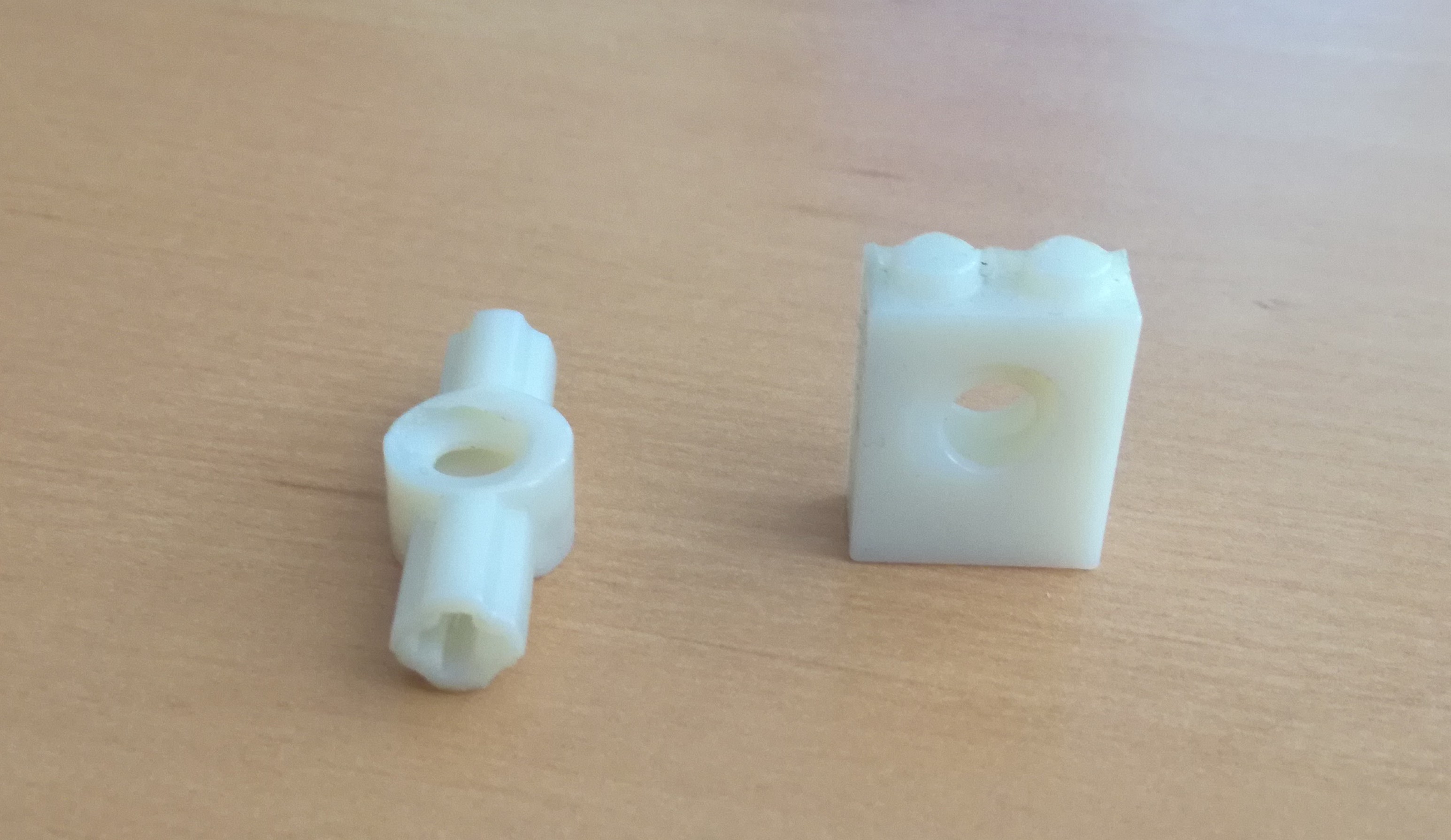
La liaison glissière :
Liaisons glissières (à droite la pièce finale)
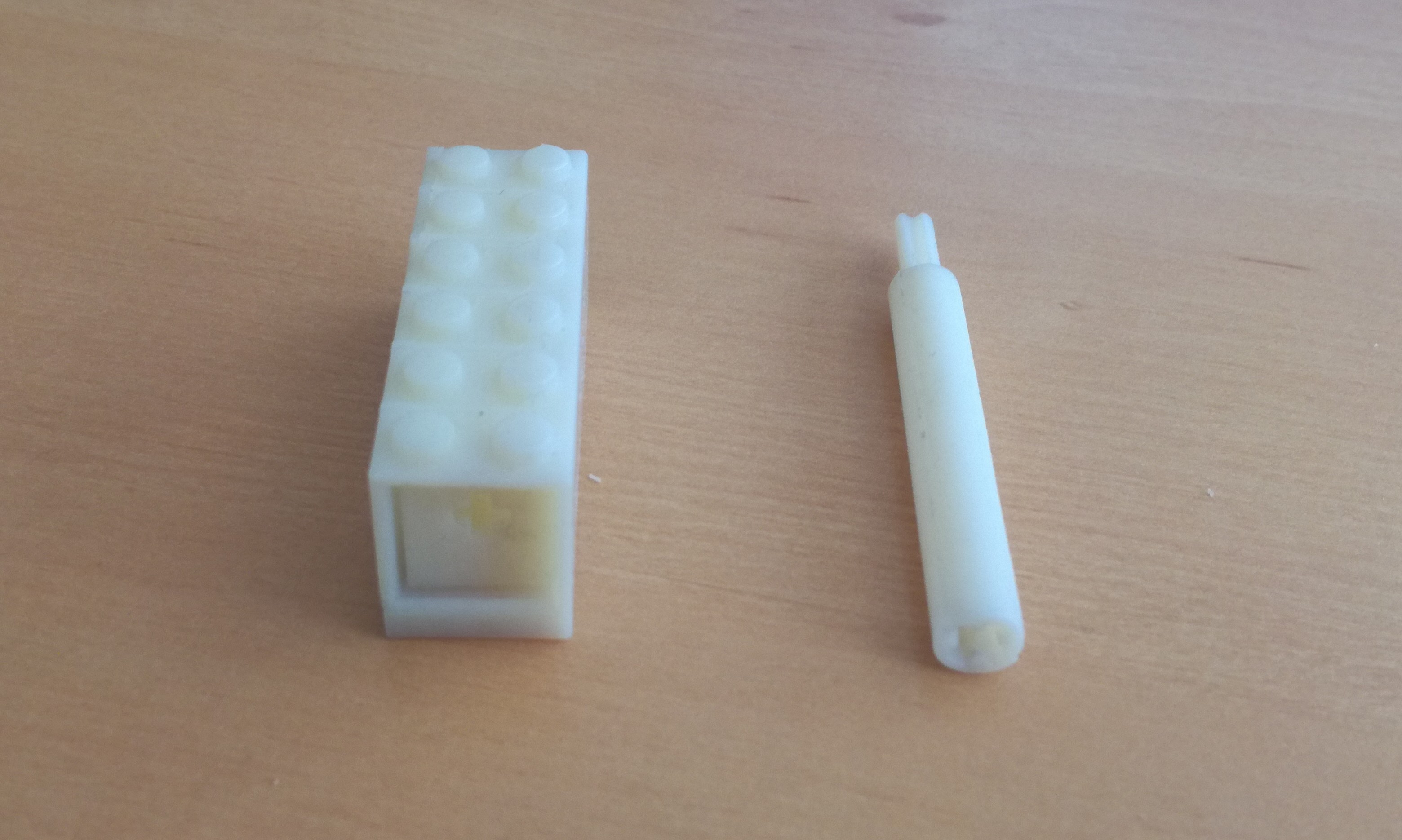
La liaison hélicoïdale :
Pour cela nous avons opté pour 2 prises femelles cruciforme de chaque côté du perçage, ce qui est beaucoup plus économique niveau matière, et plus stable dans un montage.
Liaisons hélicoïdales (à gauche la pièce finale)
La liaison rotule :
Pour la création de cette liaison, notre idée fut de créer une sphère et un socle emboîtés l’une dans l’autre. Nous savions que l’imprimante 3D permettait l’impression d’une pièce dans une autre, nous en avons donc profité. Pour l’adaptabilité de cette pièce nous avons choisis des embouts cruciformes mâles pour la sphère et le socle. Nous avions trouvé les dimensions Lego® des pièces cruciformes mâles sur internet, nous les avons donc reportées sur Solidworks. La difficulté principale était la détermination du jeu entre la sphère et son socle, celui-ci devait être assez grand pour que la matière friable de l’imprimante 3D puisse être retirée mais assez petit pour empêcher les deux pièces de se séparer l’une de l’autre trop aisément.

Liaison rotule
Difficultés et problèmes rencontrées :
Nous avons aussi eu quelques difficultés : notamment la complexité des pièces à concevoir sur SolidWorks (perçage de la pièce hélicoïdale).
Nous avons également eu des soucis au niveau de l’impression, comme une coupure de courant, ou encore une erreur d’impression inexpliquée, que vous pouvez voir ci dessous:
Pièces mal imprimées
(quasiment coupées en deux)
Les différents montages réalisés :
Nous avons passé quelques heures à réaliser ces schémas afin d’étudier quelles liaisons allions-nous devoir concevoir. C’est ainsi que nous avons remarqué que la glissière et la rotule étaient difficiles à modéliser sur le sinusmatic par exemple.
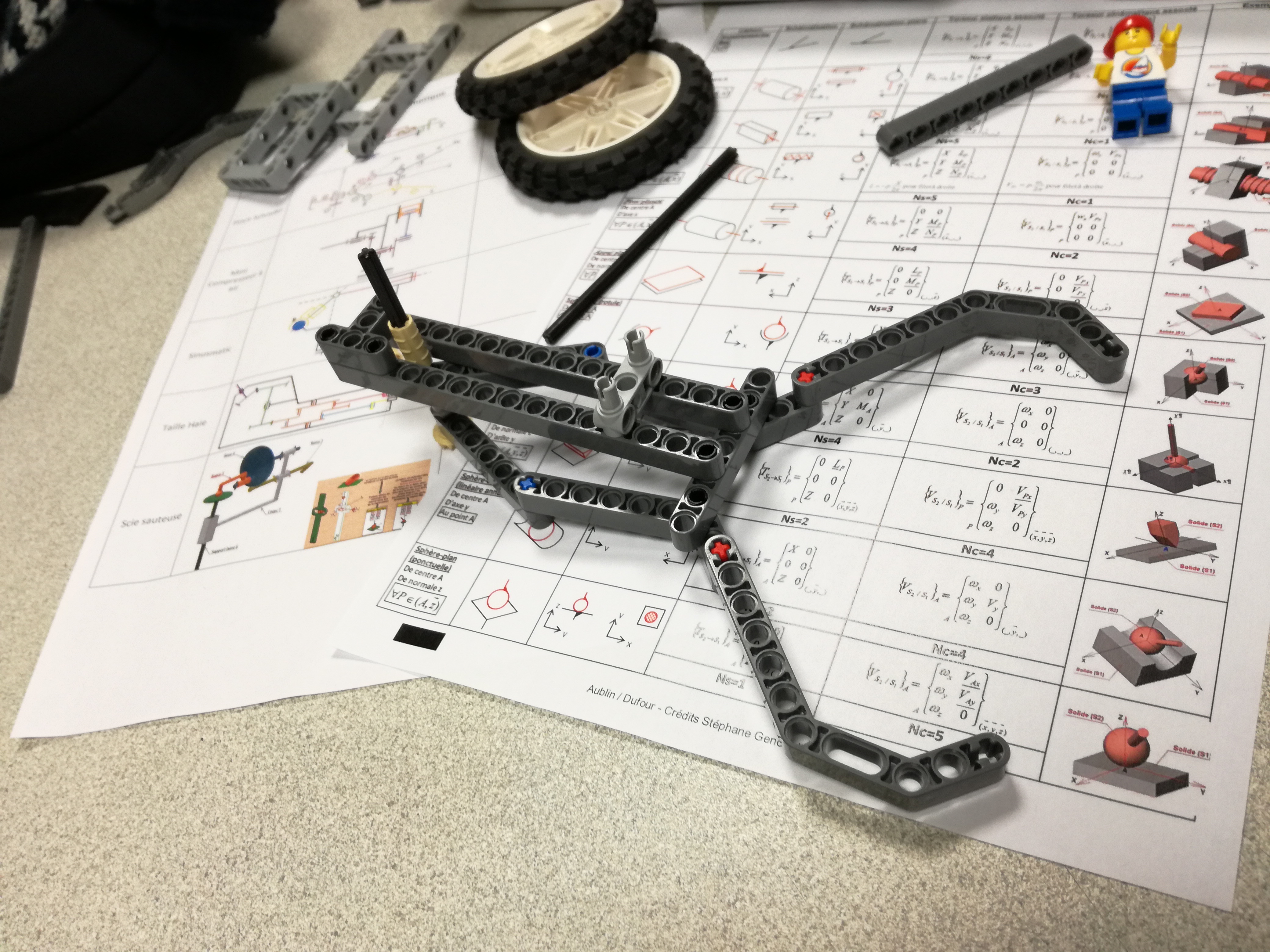
Exemple du montage :
Pince Schrader
Complexité visible de la rotule & glissière

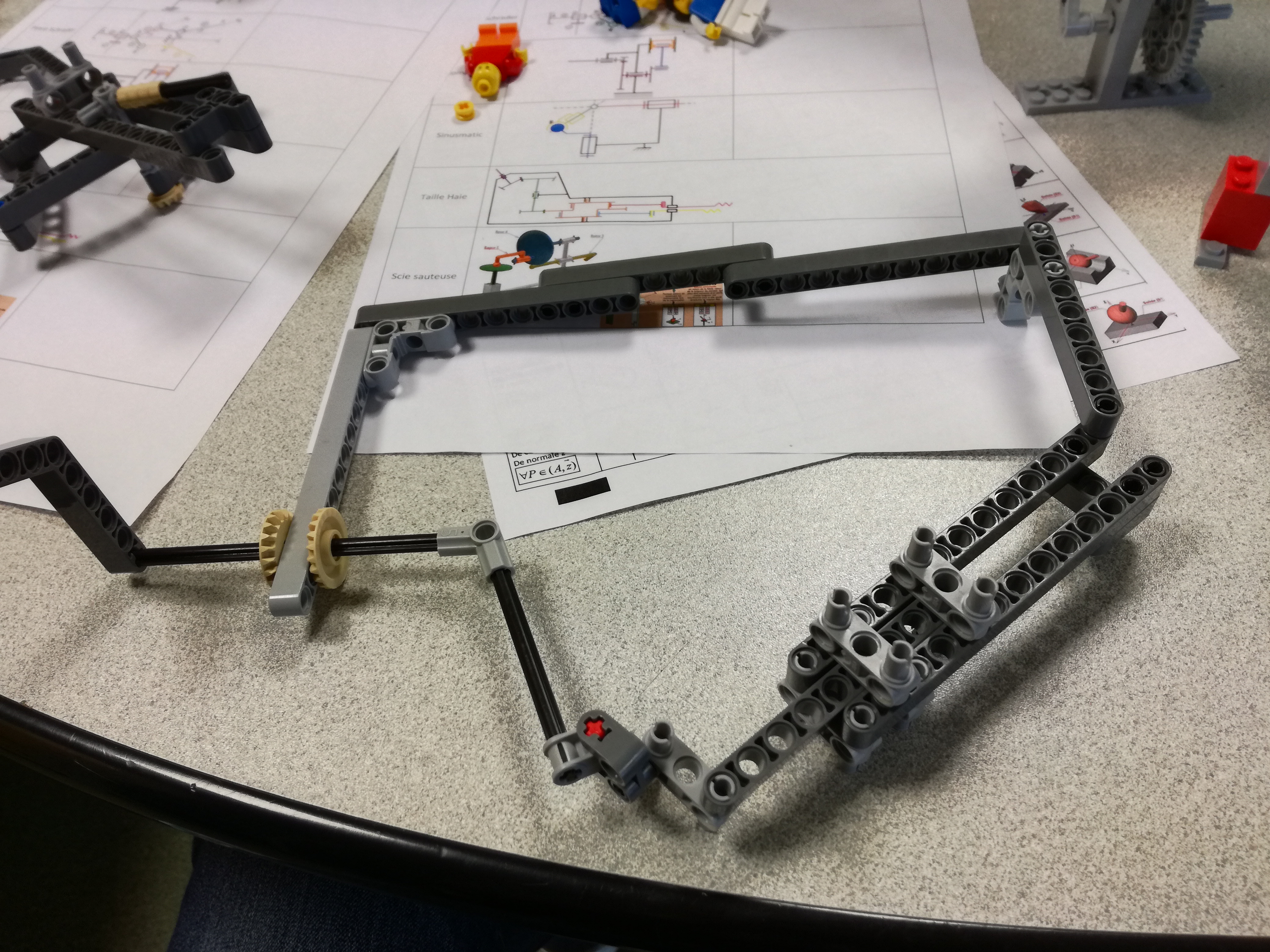
Sinusmatic :
Montage initial
Montage final
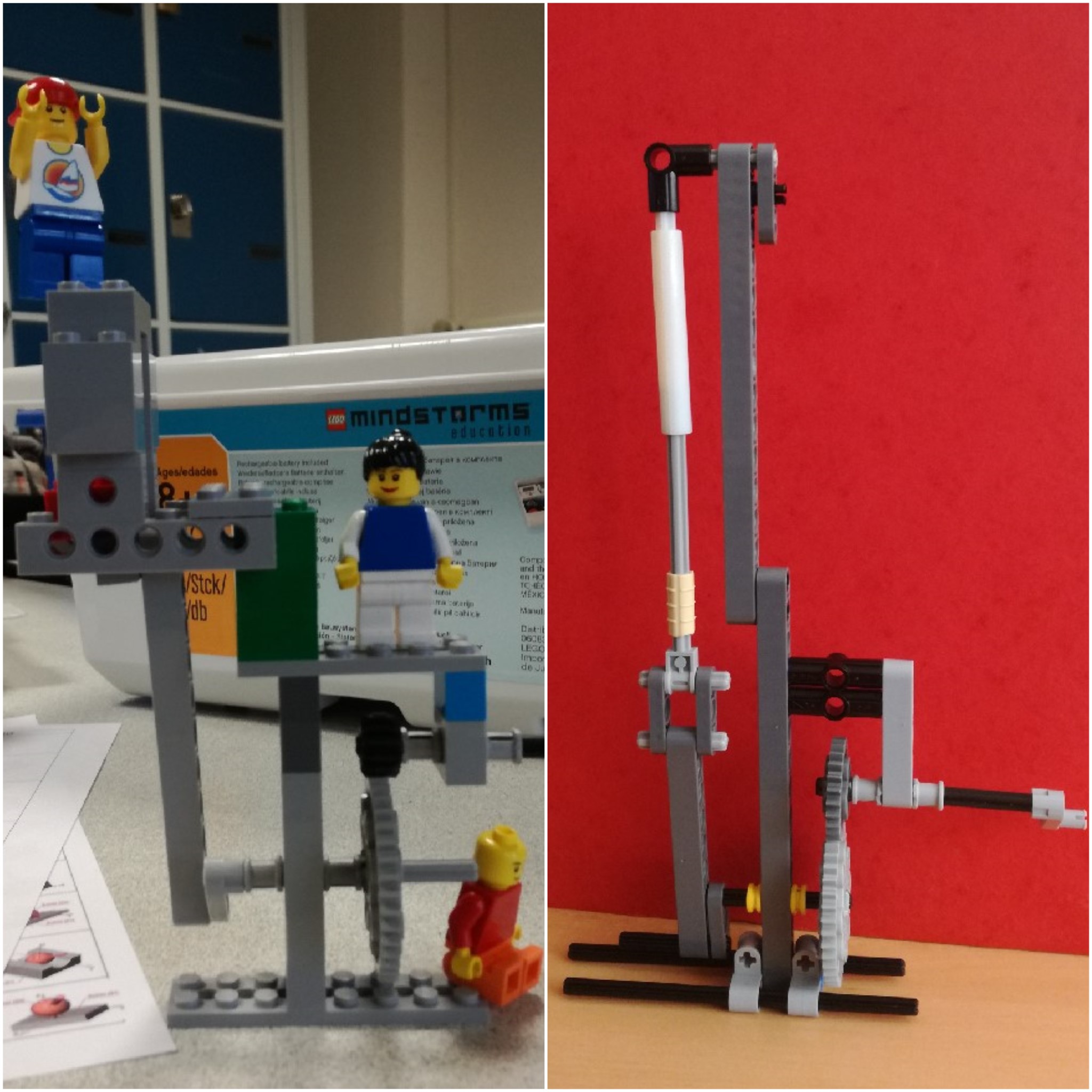
Pompe avec piston :
Montage initial (gauche)
Montage final (droite)
Cale réglable :
Montage initial
Montage final
Pour conclure sur ce projet, nous pouvons dire que nous l’avons beaucoup apprécié pour les nouvelles méthodes que cela impliquait : notamment le travail en quasi-totale autonomie.
Nous remercions aussi M.Verron qui a toujours été très agréable et très pédagogue !