
- Bonjour à tous !
Nous sommes trois étudiants de Peip2, dans le cadre de nos études nous avons choisi de travailler sur les muscles via la technique de l’origami dans le but de trouver de nouvelles formes de liaisons mécaniques. Durant ce projet, nous avons été accompagné par M. Verron.
Les muscles artificiels via origami sont des objets techniques imaginés par un travail collaboratif entre l’université d’Harvard et du MIT. Créés dans l’objectif de trouver une alternative aux moteurs électriques couramment utilisés, ces muscles pourraient être une solution en terme de rendement et de masse de système.
La première étape de ce projet était de s’approprier les travaux déjà entamés du MIT afin de comprendre les principes de base de la mécanique des fluides et de la mécanique du solide. Le but étant de s’approprier les mouvements créés par les différentes formes origamiques.
Pendant ce projet, nous avons décidé de travailler sur plusieurs formes d’origami afin de créer différents mouvements pour nos prototypes. En expérimentant tout d’abord avec des matériaux de récupération, nous nous sommes ensuite aidé du logiciel solidworks pour la modélisation des embouts et des structures internes au muscle.
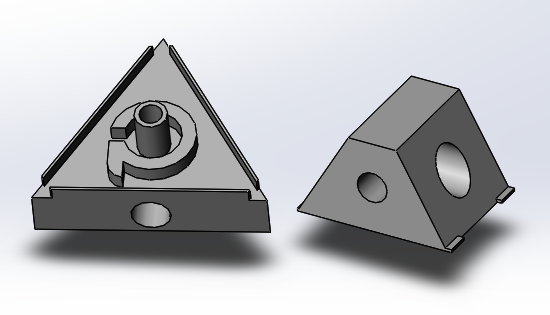
Embout Grappin triangle et trapèze pour la structure.
Les prototypes que nous avons expérimentés sont construits de la manière suivante :
- Pliage de la structure (origami)
- Scellage de la membrane autour de la structure
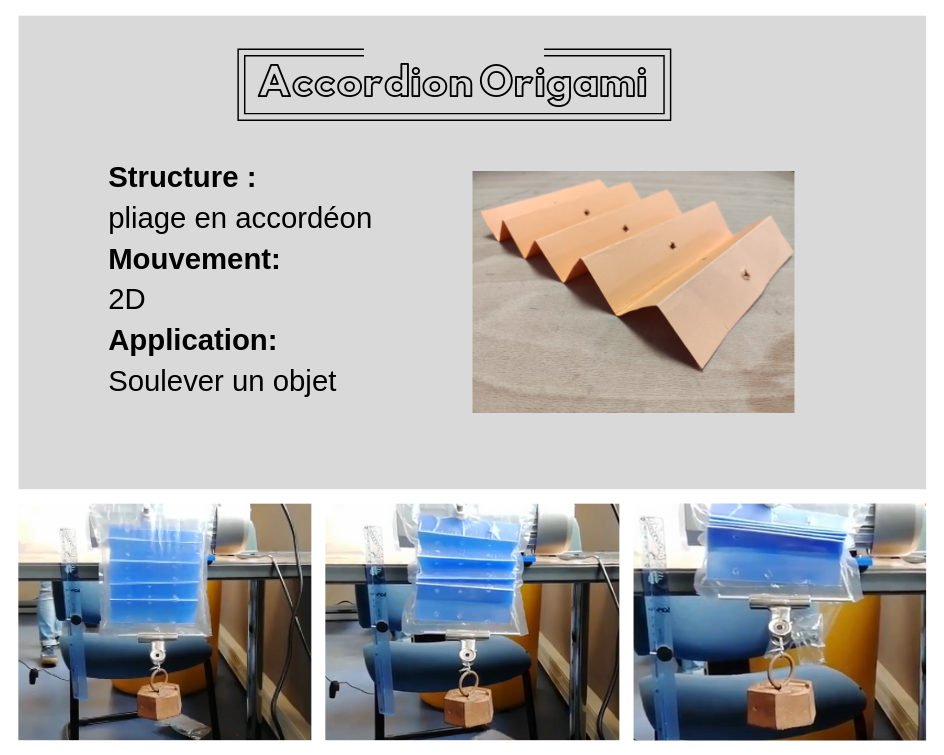
- Connexion de la structure à la pompe avec l’embout. Nous avons commencé par le muscle le plus simple qui permet de réaliser une traction dans le but de lever une masse.
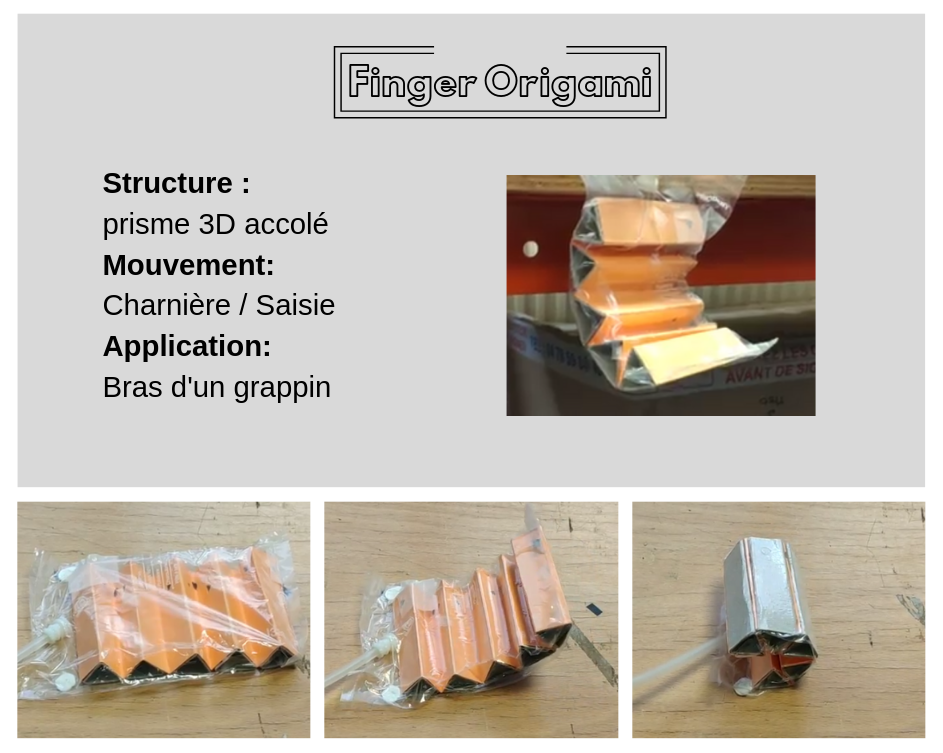
Nous avons ensuite décidé de créer un origami qui se rapprocherait plus d’un mouvement d’une main, l’ajout de triangles dans la structure nous a permis de créer une rotation pour la saisie d’objet par exemple.
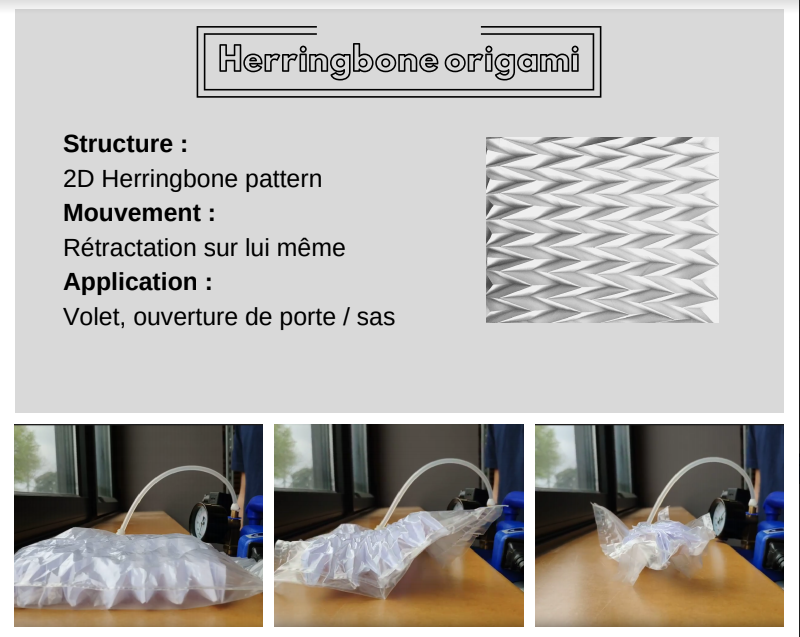
 Un autre objectif du projet était de créer un origami capable de se rétracter sur lui-même, cela nous a été possible grâce au pliage en structure 2D “herringbone”.
Un autre objectif du projet était de créer un origami capable de se rétracter sur lui-même, cela nous a été possible grâce au pliage en structure 2D “herringbone”.
 Le dernier objectif, peut être celui que nous voulions le plus développer puisqu’il permet d’attraper un objet puis de le soulever. Ce qui est intéressant c’est le fait que ce gabarit de grappin pourrait éventuellement être utilisé en industrie par exemple pour déplacer des charges et ainsi pouvoir remplacer les treuils électriques habituellement utilisés.
Le dernier objectif, peut être celui que nous voulions le plus développer puisqu’il permet d’attraper un objet puis de le soulever. Ce qui est intéressant c’est le fait que ce gabarit de grappin pourrait éventuellement être utilisé en industrie par exemple pour déplacer des charges et ainsi pouvoir remplacer les treuils électriques habituellement utilisés.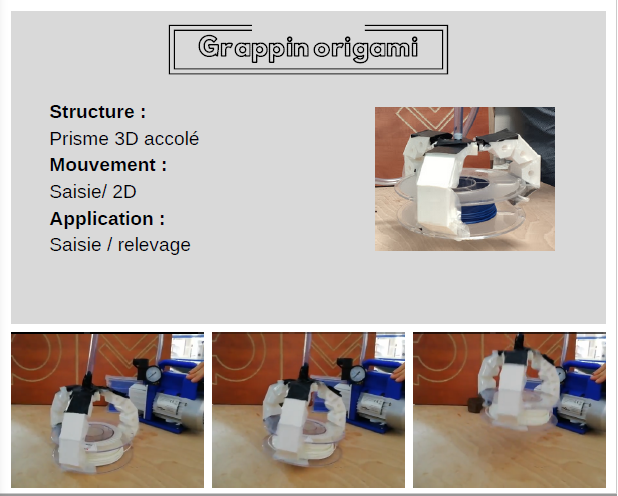
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
Vidéos :
Conclusion :
Nous avons été très satisfait de ce projet tout au long de son déroulement. Il a représenté pour nous un défi technique intéressant car nous voulions créer des muscles intéressants technologiquement mais aussi visuellement. Le coté démonstratif était important car nous pensons qu’il serait intéressant de présenter de tels objets lors des portes ouvertes de l’école pour représenter l’option QIF.