Et si l’on facilitait la vie des gens en un clic ?
C’est l’objectif de notre projet : Proposer un site internet à une ludo-crèche qui leur permettrait de gérer toutes leurs demandes d’emprunt de jeux, en un clic. Il nous faut pour cela :
- Apprendre à coder en PHP.
- Trouver un moyen d’attribuer un ensemble de jeu à un ensemble de personnes de manière automatique.
- Gérer tout ce qui est relatif à un site internet : mise en ligne, hébergement…
Objectif : Un site web qui satisfait les utilisateurs comme les responsables et qui fait gagner du temps a tout le monde
Première étape : Apprendre à coder
C’est parti pour apprendre à coder. Entre les bases de HTML et CSS nécessaires pour comprendre PHP, la syntaxe de PHP, la structure du code… On y a passé plus d’une vingtaine d’heures.
En plus d’apprendre à coder en PHP pour réaliser l’affichage et le fonctionnement du site, on devait aussi utiliser MySQL qui est une base de données avec son propre langage ainsi qu’un solveur : un langage de programmation visant à résoudre des problèmes mathématiques.

L’apparence d’une table d’une base de donnée MySQL
Commençons la programmation du site

La phase d’apprentissage étant terminée, nous avons pu commencer à réaliser une première version du site, un peu vide puisque nous avions très peu d’informations sur le contenu et l’aspect qu’il devait avoir. C’est là qu’on se heurte à nos premiers problèmes :
Le travail en coopération : étant donné le temps que l’on avait pour créer ce site, il y allait avoir beaucoup de code réparti sur beaucoup de pages. Au bout d’un moment, on s’est rendu compte que l’on n’avait pas tous la même manière de coder et la structure du code s’est vite dégradée. Il a fallu imposer des règles strictes pour s’assurer qu’on puisse garder l’ensemble des pages de codes claires tout au long du projet.
La fonction d’attribution : sans rentrer dans les détails, pour attribuer les jeux aux emprunteurs, il faut représenter cette tâche par un problème mathématique que l’on va ensuite résoudre grâce à un solveur. Ce solveur nommé GLPK sert à résoudre des programmes linéaires, cependant, il faut apprendre à coder dans ce langage. Le problème étant que quasiment personne n’utilise GLPK, et cela se ressent dans l’absence de documentation sur ce langage. Notre seule manière d’apprendre était d’utiliser un simple PDF de quelques pages sur GLPK et de faire des essais et des erreurs.
Une quantité de travail inattendue
Ce site devait simplement permettre à des utilisateurs de faire des demandes de prêt de certains jeux et permettre aux responsables du site d’attribuer ces jeux automatiquement, mais il y avait bien plus de travail derrière que ce que l’on imaginait.
Voici une liste non exhaustive de ce qu’il faut faire pour qu’un site comme celui-là fonctionne :
- Faire un système de connexion/inscription.
- Créer différentes interfaces en fonction de qui est connecté (Simple utilisateur ou responsable).
- Stocker les données des utilisateurs et des responsables à l’aide d’une base de données.
- Gérer les flux d’information entre les pages.
- Lier plusieurs langages, PHP pour l’affichage et la gestion du site, GLPK pour le système d’attribution des jeux et MySQL pour le stockage de données.
- Créer un ensemble de fonctionnalités qui font le contenu du site (Faire et supprimer des vœux, voir les jeux disponibles et demandés, voir les informations de son compte…)
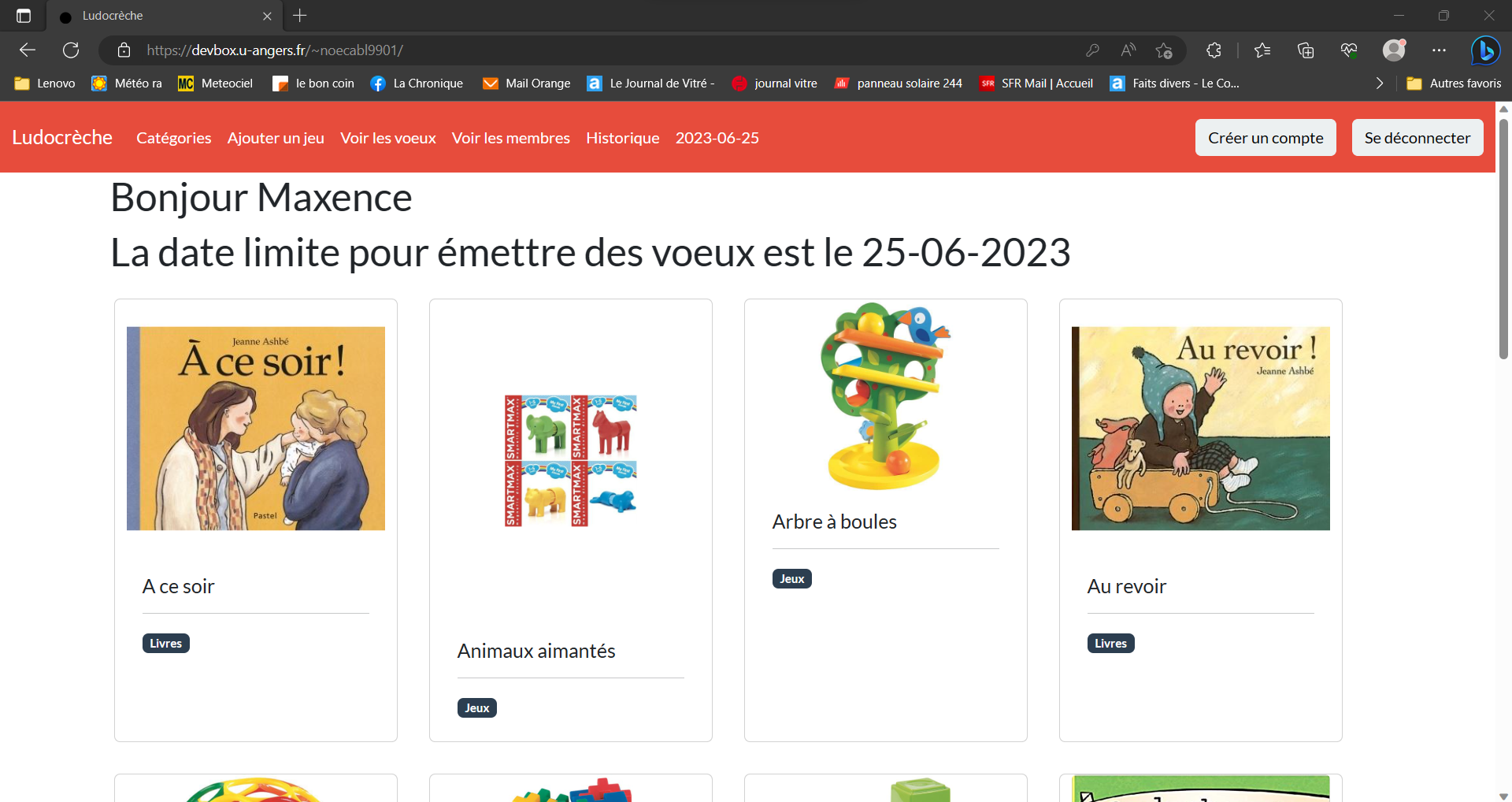
Le résultat final
Malgré les quelques problèmes mentionnés plus tôt et les nombreuses heures passées à débugger le site, nous sommes finalement parvenus à la version définitive qui répondait aux attentes du client. Ce site permet aux adhérents de la ludo-crèche de demander d’emprunter des jeux, de consulter toutes les informations dont ils ont besoin (infos personnelles, infos sur les jeux, consulter leurs vœux et leurs jeux attribués…). Ce site est surtout utile aux responsables de la ludo-crèche, car ils peuvent désormais obtenir directement une liste à jour des demandes d’emprunt, attribuer les jeux d’une manière presque optimale, bien meilleure que ce qu’ils auraient fait à la main et surtout bien plus rapidement. En plus du projet initial, nos clients nous ont demandé des fonctionnalités supplémentaires afin que ce site seul permette la gestion totale des prêts de jeu. Ainsi il leur permet aussi de gérer leurs stocks et de savoir où sont les jeux plus simplement. Notre site leur offre une archive de toutes les attributions précédentes, une liste de leurs membres et la possibilité d’avoir différents modes d’emprunts.


Conclusion
Ce projet était une expérience vraiment différente du genre de travaux que l’on a fait jusqu’à maintenant dans nos études. Ce qui nous a motivé à nous investir autant, c’est le fait de savoir qu’il serait vraiment utile et qu’il aiderait des personnes au quotidien. Ce projet a été l’occasion de se mettre dans la peau d’un professionnel et de concevoir un produit pour un client, d’autant plus que même après la date limite de réalisation du projet, nous accompagnerons nos clients pour s’assurer que tout fonctionne correctement. C’était aussi un bon entraînement à la programmation pour deux d’entre nous qui allons poursuivre nos études dans le domaine de l’informatique.
Polytech Angers – Projets PEIP2
Projet réalisé par Florian Louveau, Maxence Martin, Noé Cabaud-Bloquel.