
Bonjour à tous !
Nous sommes 4 étudiants en deuxième année du cycle préparatoire de POLYTECH ANGERS: BRIAND Clément, SYS Jérémy, GUIBERT Corentin et ZAKIAN Adrien. Durant le second semestre, nous avons travaillé sur la construction d’un char à voile radiocommandé.
L’objectif de ce projet de 80 heures, est de construire une char à voile radiocommandé de classe 1, doté d’une intelligence. Le char doit être fonctionnel, il doit avancer grâce au vent et il doit pourvoir être dirigé grâce à une radiocommande. La partie radiocommandée concerne la direction ainsi que la tension de la voile. La partie intelligente est libre d’interprétation, elle comprend tout ce qui touche à l’adaptation du char à voile à son environnement de manière autonome.
Nous partons de la feuille blanche, aucune contrainte ne nous est imposée concernant la conception à l’exception des dimensions qui doivent respecter celles d’un char voile de classe 1 c’est à dire 0.75 mètre de longueur, 0.5 mètre de largeur et 1 mètre d’hauteur.
RÉALISATION DU PROJET
-
Recherche des solutions existantes
Dans un premier temps, nous avons effectué un travail de recherche sur ce qui existait déjà. Il existe une communauté très active dans le modélisme.
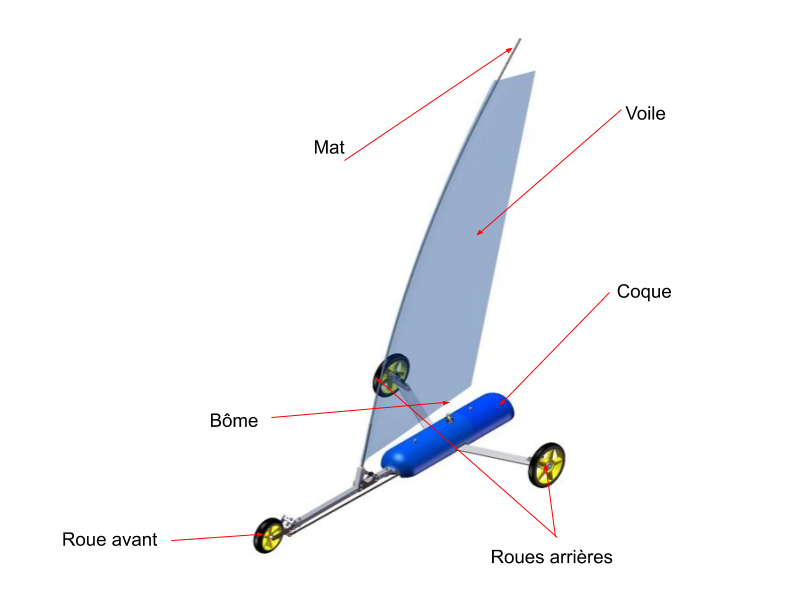
Voici le modèle sur lequel nous nous sommes basé pour la conception :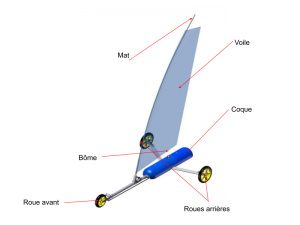
Nous avons choisi d’utiliser de l’aluminium pour la structure, du dibond pour la plaque, un mât et une bôme en carbone ainsi que des roues de trottinette. La rotation de la roue avant est assurée par une charnière de porte. Nous avons fait réaliser la voile par un professionnel pour avoir la meilleure qualité possible.
-
Fabrication
Après avoir modélisé le char à voile sur SolidWorks, nous sommes passés à l’usinage de nos pièces et à la construction du char.
Cette étape a été la plus longue car nous avions des pièces a créer entièrement comme la fourche avant ou le pied de mât.
Nous avons utilisé la fraiseuse numérique du FabLab afin que nos découpes soient les plus précises possibles.Résultat :

-
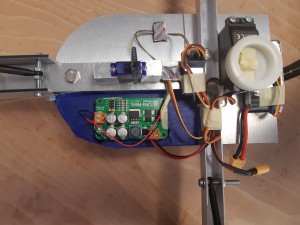
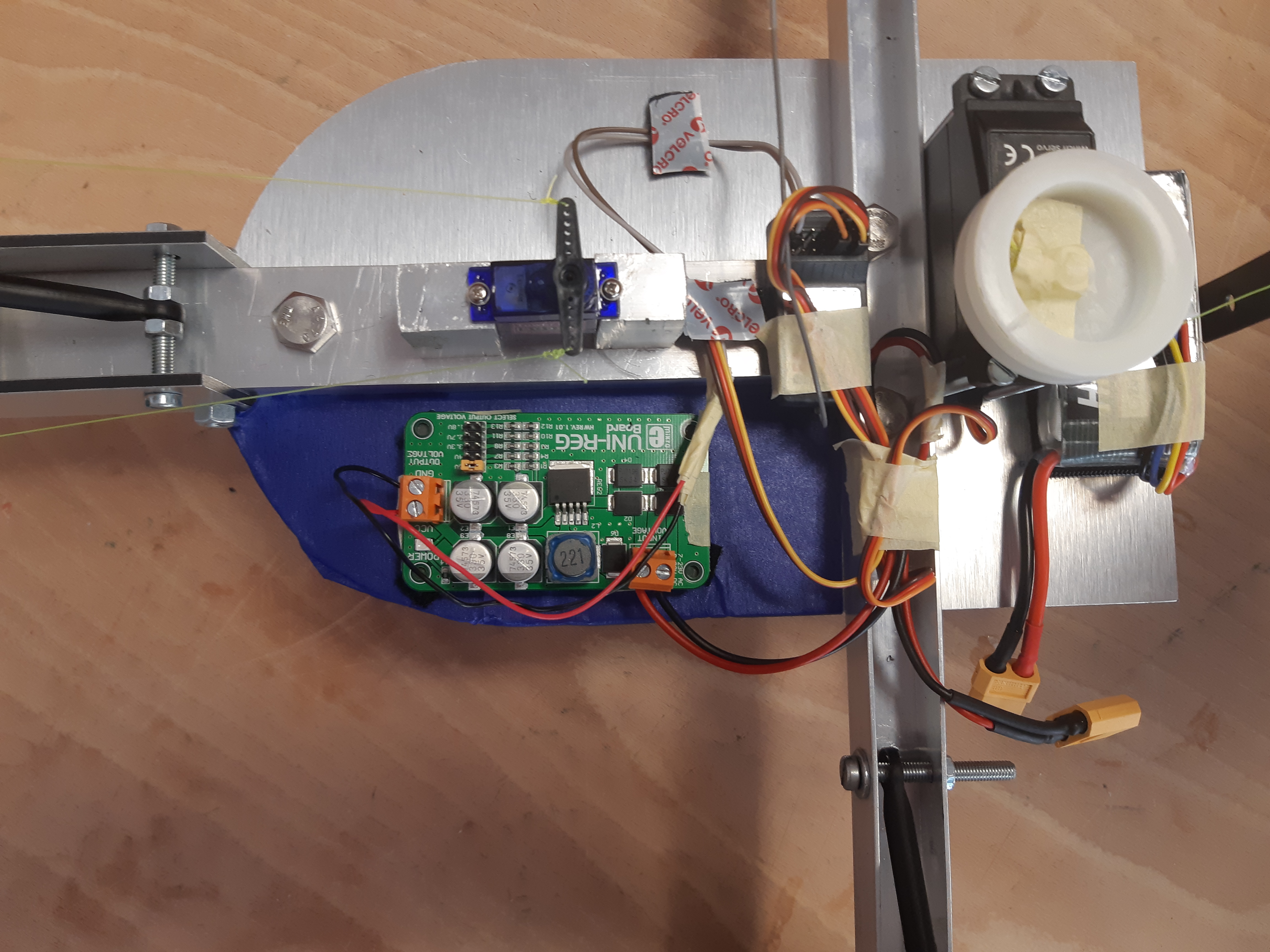
Ajout de l’électronique
Il nous a fallu ensuite ajouter la partie électronique afin de contrôler le char à voile. La direction est assurée par un servomoteur relié avec du fil de pêche à la fourche avant. La tension de la voile est gérée par un servotreuil. Les servomoteur et servotreuil sont branchés directement sur le récepteur de la radiocommande. L’alimentation est assurée par une batterie Lipo 3S qui délivre du 11,1 V. Nous avons donc rajouté un régulateur de tension en série afin de convertir la tension en 5V acceptable pour les composants.
RÉSULTAT FINAL

-
- Dépassement de la longeur de 3cm
- Problème de coaxialité
- Ouverture dans le profilé qui a fragilisé la struture
- Défaillance du récepteur
- En raison de l’absence de vent, nous n’avons pu tester le char à voile qu’en le poussant
- Nous n’avons pas eu le temps d’intégrer la partie intelligente avec capteur à ultrason et centrale inertielle
Difficultés rencontrées


Résultat de ces 80h