⬪ Présentation
Bonjour à toutes et à tous, nous sommes Damien, Mathieu, Martin et Titouan ,quatre étudiants en deuxième année de cycle préparatoire à Polytech Angers. Cet article du blog est dédié à la présentation de notre projet que nous avons dû réaliser lors du quatrième semestre de notre cycle préparatoire.
⬪ Dans quel but ?
Le but final de notre projet est de créer des séances de travaux pratiques qui serviront de support à la matière Analyse des systèmes mécaniques, une matière qui est enseigné au premier semestre de la deuxième année. Ces TP porteront sur la notion de Transmission de Puissance, un chapitre de cette matière et plus particulièrement sur la transmission par engrenages. Pour cela, nous avons à disposition une grande quantité de boîtes Lego de type Mindstorms NXT et EV3:


Notre objectif est d’utiliser ce matériel afin d’expliquer le plus simplement et efficacement possible les différentes notions du chapitre aux futurs PEIP2. Ce sont des notions que nous-même avons pu apprendre au cours du semestre 3 dans le cours d’Analyse des systèmes mécaniques. Notre professeur réfèrent est Monsieur Verron et nous avons eu 100 heures dans notre emploi du temps pour le réaliser.
⬪ Notre plan d’attaque
En sachant qu’il n’y a pas de cours magistraux dans cette matière et que le cours est expliqué au fur et à mesure des séances de TD, nous avons décidé de réaliser 2 TP d’1h20. Le but étant d’en avoir un en début de chapitre avec les notions que nous jugeons simples et fondamentales. Puis une seconde séance en fin de chapitre un peu plus théorique sur des principes plus complexes.
⬪ Travaux réalisés
Dans le premier TP, nous nous sommes surtout concentrés sur les formules liant le rapport de transmission entre 2 engrenages et d’autres paramètres comme le nombre de dents des 2 engrenages, leur rayon respectif, la vitesse de rotation de l’axe d’entrée et de sortie…
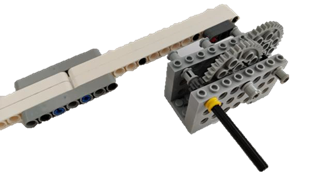
En effet, lorsqu’un engrenage en entraîne un autre, étant donné qu’ils ne sont pas de la même taille, il y aura l’existence d’un rapport entre ces 2 roues dentées que l’on appelle rapport de transmission. Si celui-ci est supérieur à 1, on parlera de rapport multiplicateur et si celui-ci est inférieur à 1, on parlera de rapport de réduction. Nous avons donc mis en avant ce rapport à travers différents petits montages, certains seront à refaire par les étudiants alors que d’autres seront déjà montés pour que les étudiants puissent faire des mesures directement dessus. Voici un aperçu des questions posées dans ce TP1:

Pour le montage ci dessus, les étudiants doivent dans un premier temps compter le nombre de dents des 2 roues dentées. Ceci fait, la consigne est la suivante : compter le nombre de tours que fait la grande roue pour 10 tours du pignon (petite roue). Ils trouveront alors, grâce à cette manipulation le rapport de transmission. Après cela, ils en déduiront la formule qui lie le rapport de transmission et le nombre de dents des 2 engrenages et en auront terminé avec ce premier atelier.
Par la suite, ils essaieront de démontrer les autres formules avec d’autres ateliers où ils pourront utiliser des outils qu’ils n’ont peut-être jamais utilisés comme le tachymètre qui permet de mesurer la vitesse de rotation des objets en mouvement.
Pour en savoir plus sur ce premier TP, vous pouvez le retrouver en format pdf via ce lien.
Pour réaliser ce TP, nous avons dû travailler sur le côté organisationnelle en formant des petits groupes au sein de la classe pour favoriser l’apprentissage. Découlant de cela, on a créé plusieurs ateliers afin que les groupes puissent tourner et apprendre les différents principes. Pour se faire, nous avons dû jouer sur le temps de ces ateliers afin qu’il y ait un bon déroulement de la séance, une bonne fluidité, sans attente provoquant des pertes de temps.
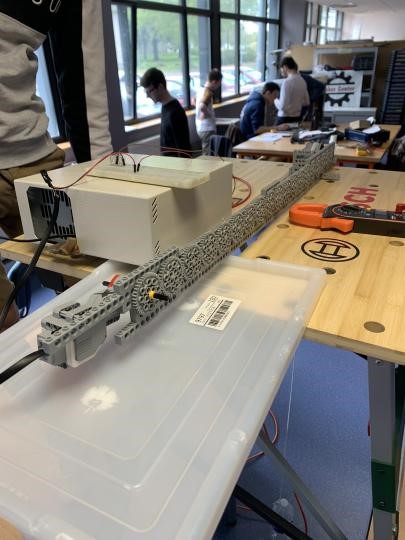
Pour le deuxième TP que nous avons décidé de placer en fin de chapitre, nous avons voulu approfondir les notions de couple et de rendement. En ce qui concerne le premier atelier par exemple, nous voulons leur montrer l’impact de la distance entre l’axe de rotation d’un bras de levier et une masse sur le couple. En effet vous n’êtes pas sans savoir qu’il est plus facile d’ouvrir une porte si on la pousse du côté extérieur que si on la pousse proche de son axe de rotation. Et bien là c’est le même principe! En accrochant une masse à un bras de levier, on remarque que le moteur n’arrive pas à soulever celle-ci si elle est placée loin du centre de rotation car le moteur n’a pas assez de force (couple).
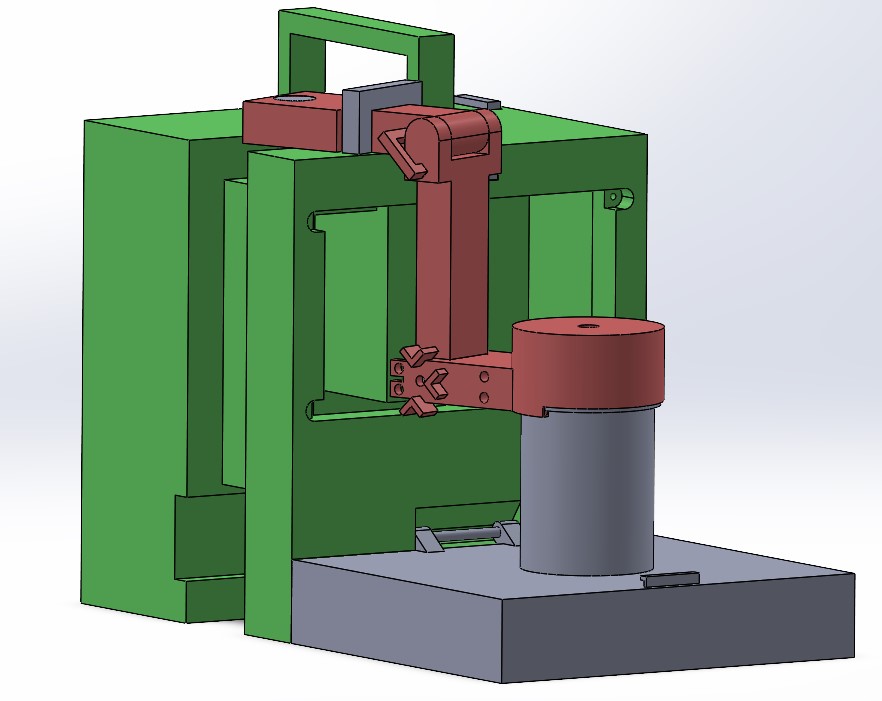
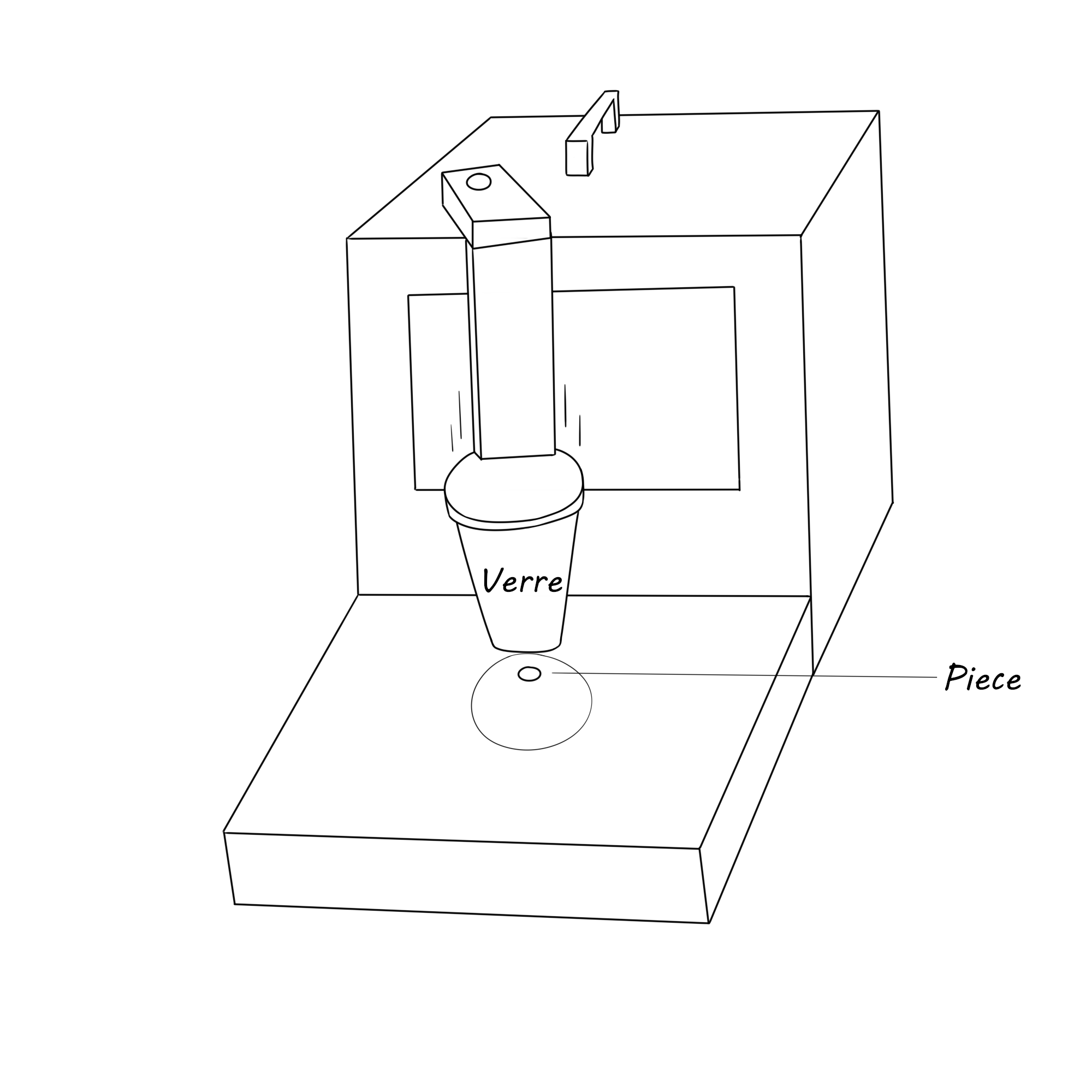
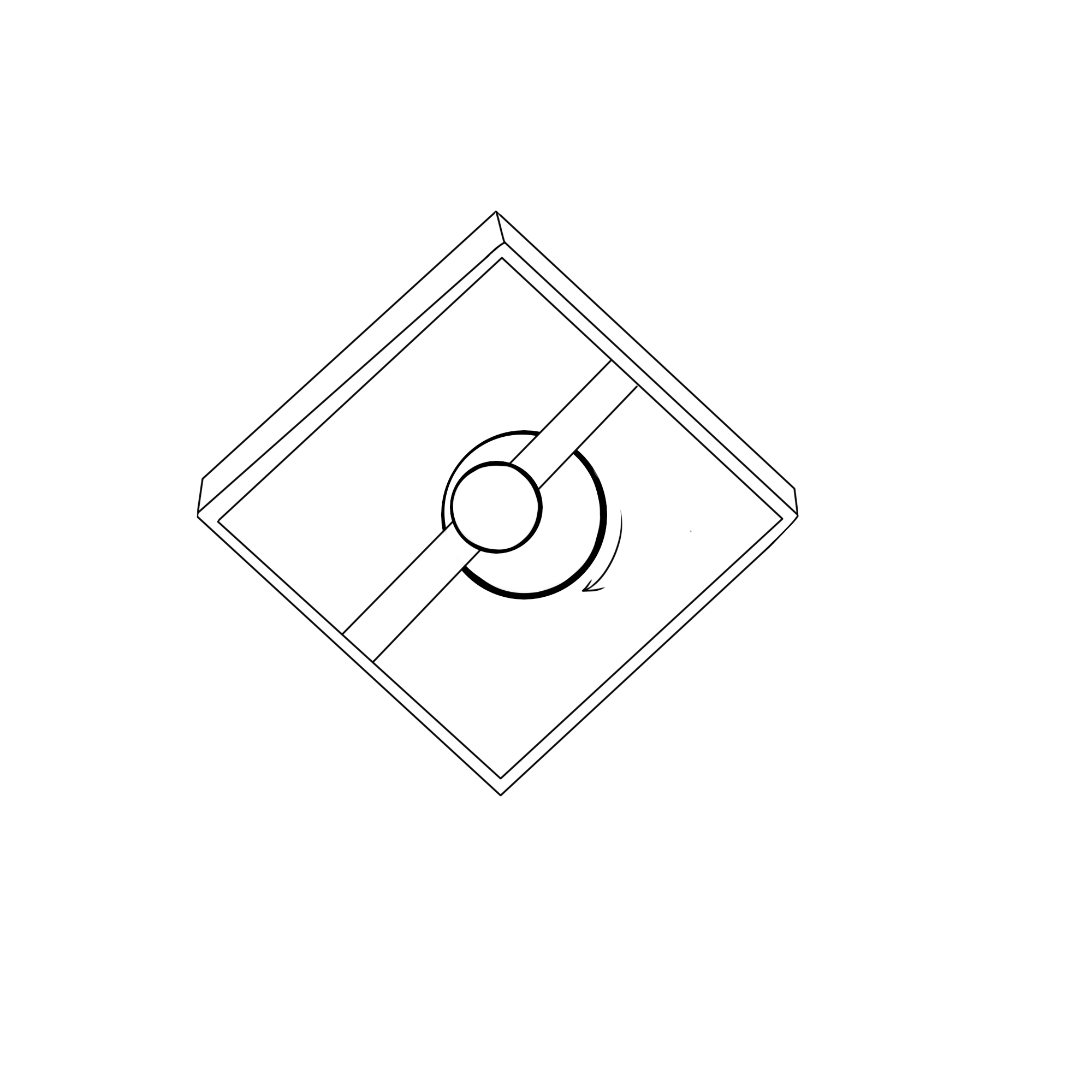
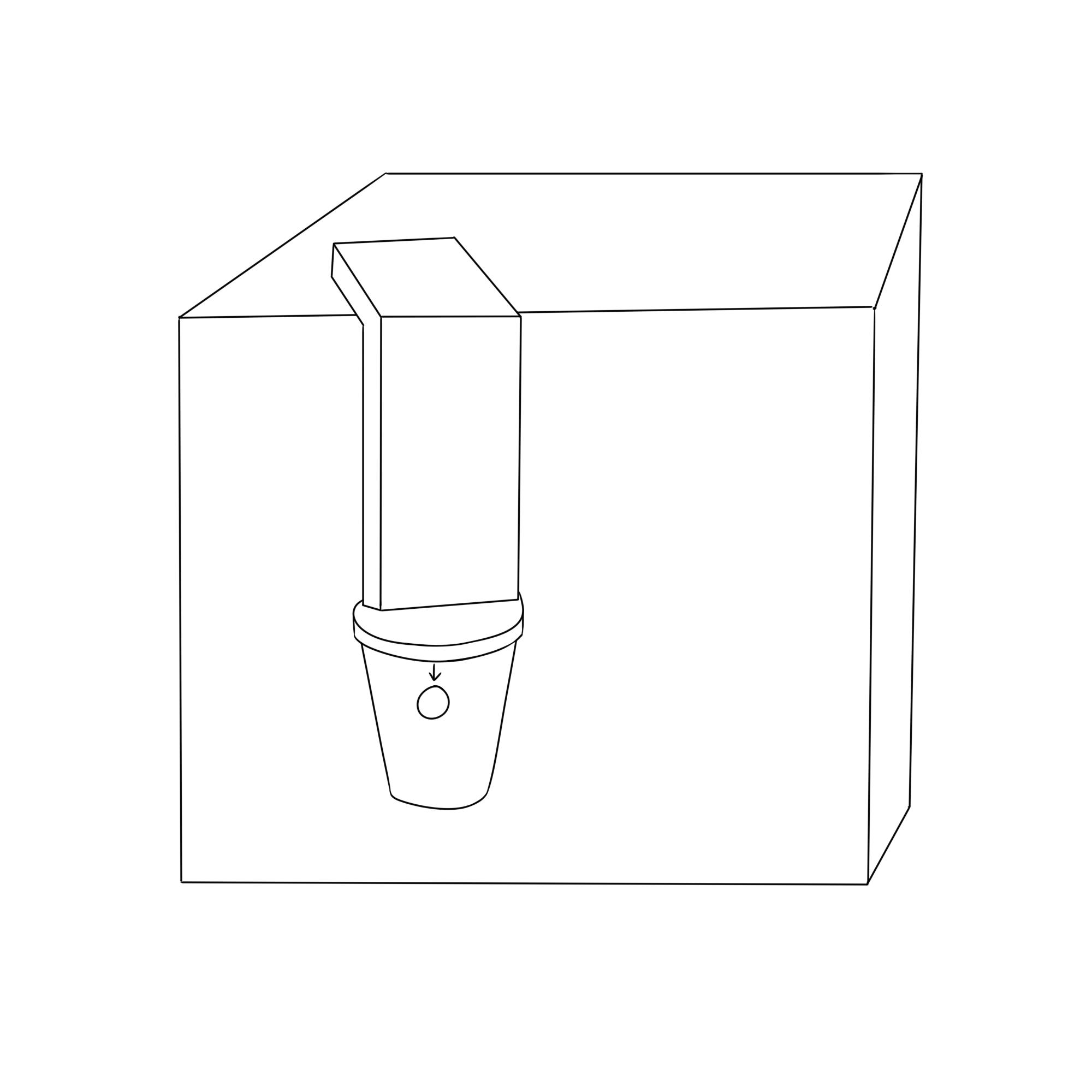
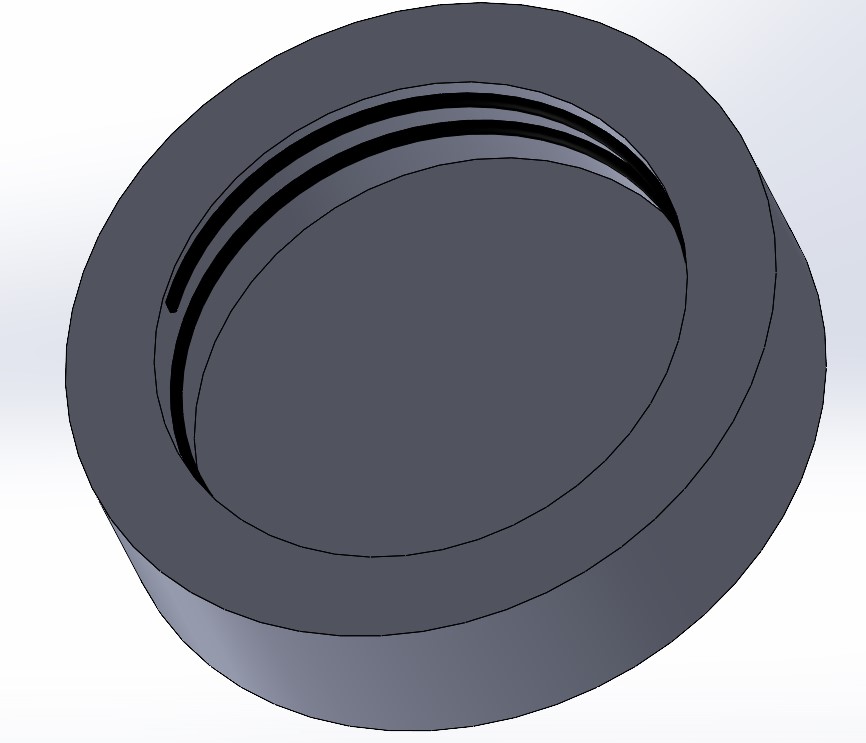
Ensuite, nous sommes passés sur des notions plus complexes telles que la variation des masses qu’un treuil peut soulever en faisant varier la taille des tambours (= le cylindre où s’enroule la ficelle qui soulève la masse) que nous avons réaliser en CAO (3D). Cet atelier repose sur le même principe que précédemment mais avec des tambours de rayons différents. Encore une fois si vous voulez en savoir plus sur les étapes de réalisation des ateliers de ce TP2, vous pouvez suivre ce lien afin d’accéder à la version pdf.
Enfin concernant le troisième atelier, le but est de faire calculer aux étudiants le rendement de différents engrenages pour qu’ils comprennent que la transmission de puissance s’accompagne également de pertes car dans la vie réelle, il n’y a jamais de contacts « parfaits ».
⬪ Problèmes rencontrés
Bien évidemment ça n’aurait pas été aussi drôle si nous avions tout réussi du premier coup ! Alors, oui, nous avons rencontré un certain nombre de problèmes/difficultés au cours de notre conception tels que :
– La répartition des groupes sur les différentes activités du TP
– L’optimisation du nombre d’étudiants par groupe pour qu’ils apprennent le mieux possible tout en respectant les contraintes matérielles
– Le respect des contraintes de temps (1h20 par TP)
– La structuration des TP
– Comment calculer le rendement du moteur Lego
– Quantifier les pertes de puissance sur un système mécanique
– Créer des montages Lego permettant de démontrer des formules théoriques
⬪ Comment les avons-nous résolu ?
C’est sûrement sur la résolution de nos problèmes que nous avons appris le plus. Par exemple, pour calculer les rendements, nous avons dû passer par une grosse étape électricité/électronique :
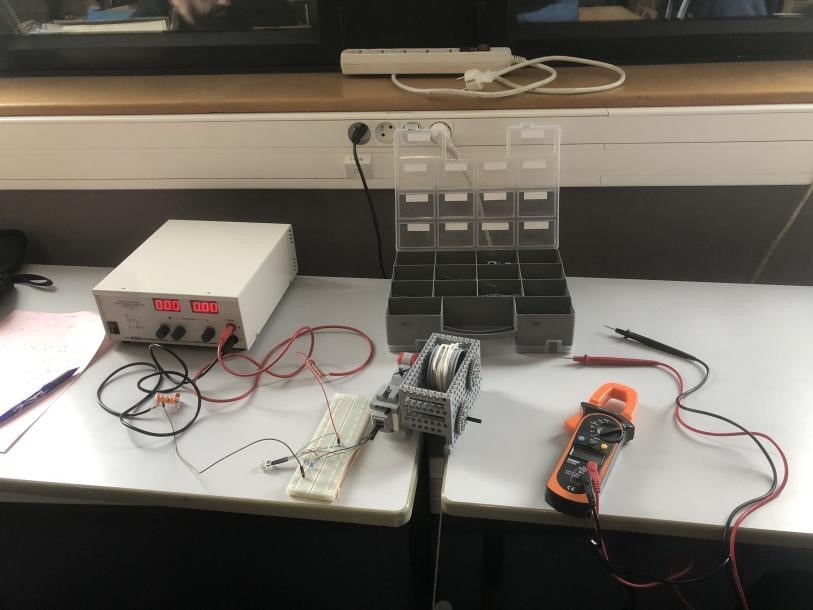
Alors que nous n’avions quasiment aucune connaissances en électronique, nous avons pu apprendre comment câbler la breadboard, manipuler l’alimentation et relever les données nécessaires (ici le courant) pour nos calculs. Cette étape de calcul de rendements nous a pris beaucoup de temps, mais elle aura été nécessaire pour la conception du TP et aura été une expérimentation très riche pour nos connaissances personnelles.
⬪ Conclusion
Nous avons réussi à fournir 2 TP, qui, nous en sommes convaincus, permettront aux PEIP2 de l’année prochaine et des autres années de comprendre le plus aisément possible les différentes notions de transmission de puissance. Ce projet nous a permis de travailler en groupe et de trouver des solutions aux différents problèmes rencontrés ou bien de simplement les contourner pour arriver à notre fin. Nous avons également pu approfondir les notions en mécanique que nous connaissions déjà et utiliser des outils de mesure que nous n’avions jamais utilisé auparavant tel que le tachymètre pour mesurer la vitesse de rotation en tours par minute.
Nous avons également travaillé sur l’esthétique de ces TP, car en tant qu’étudiant, nous savons bien qu’un TP bien structuré avec des explications claires sur le matériel utilisé est plus attrayant et donne plus envie d’apprendre.
Nous vous remercions de nous avoir lu et espérons de tout cœur que nous avons réussi à attiser votre curiosité sur la notion de la Transmission de Puissance!
PS: Quelques chaînes Youtube intéressantes avec des expérimentations Lego:
Brick Technology
Lego Technic Mastery
Brick Experiment Channel