STABILITÉ D’UN BATIMENT SOUS L’EFFET D’UN SÉISME
1 – dÉcouverte de notre sujet
En tenant compte des différentes zones sismiques dans le monde, les ingénieurs et architectes ont le devoir d’adapter chaque projet de construction à sa localisation. Ils sont formés pour maîtriser l’importance des déformations et contraintes sur l’ensemble de la structure porteuse et sur chacun des éléments qui la composent.
De ce fait, notre objectif est de se mettre dans la peau de ces ingénieurs et architectes. Nous devons développer nos connaissances sur ce sujet et les mettre en pratique avec une étude de cas et une modélisation 3D. Notre exploration du génie parasismique comprend l’étude des interactions entre le sol et les bâtiments ainsi que la recherche de solutions pour éviter l’effondrement de ces bâtiments.
La première étape est donc une phase de recherche. Les ingénieurs et les architectes peuvent utiliser les règles de construction parasismique. Elles guident la construction et peuvent varier d’un pays à l’autre, que ce soit pour le choix des matériaux ou pour l’architecture. Ces règles sont basées sur plusieurs points.
Premièrement, il est nécessaire d’étudier la zone où se situe le bâtiment, c’est-à-dire de connaître la classe du sol en fonction de sa nature et du risque de glissement de terrain.
Deuxièmement, il faut choisir la conception adaptée à l’activité d’hébergement du bâtiment ainsi qu’au nombre de personnes qui seront accueillies au sein de la structure (fondation, forme, taille…).
La dernière étape consiste à superviser l’exécution du projet. Elle consiste à planifier le chantier, à déterminer les ressources nécessaires et à suivre la partie administrative du projet. En plus des règles de construction parasismique, d’autres éléments doivent être pris en compte afin de réduire l’effet des chocs sur les infrastructures et de les rendre plus résistantes. Les principaux éléments à prendre en compte sont :
- La forme du bâtiment, ainsi que sa symétrie et sa régularité.
- Les matériaux utilisés
- L’isolation à la base, les fondations
Lorsque tous ces éléments ont été étudiés, il est recommandé de modéliser le projet de construction en trois dimensions sur un logiciel de modélisation architecturale tel que Revit, AutoCAD ou ArchiCAD. Certains logiciels permettent même de simuler un tremblement de terre en donnant la possibilité d’appliquer des forces sur la structure du bâtiment. Il est donc plus facile de modifier et d’améliorer un projet en fonction des tests effectués.
2 – PREMIERS PAS SUR REVIT

Contexte de l’étude de cas
Nous avons choisi de nous placer au niveau de l’aérodrome de Cholet le Pontreau dans le département du Maine et Loire, situé à une altitude de 137 mètres. (coordonnées géographiques: 47.080885 nord, -0.87838 ouest)

Le type de sol est un lithosol. Il est composé d’une mince couche de terre au-dessus de la roche mère. Cette configuration lui donne la particularité de très peu retenir l’eau. D’après la carte des zones de sismicité, nous nous situons dans une zone de niveau 3 (séisme modéré). Nous nous sommes orientés vers un bâtiment de catégorie A, signifiant une habitation.
- Choix de la structure du bâtiment à modéliser
L’objectif de cette étape fut de s’accorder sur la conception du bâtiment. Autrement-dit, déterminé la structure de notre maison. En tant que maison d’habitation de catégorie A, elle comporte :
→ Une dalle de fondation de type radier d’épaisseur 35 cm.
→ Un sous sol avec des murs porteurs de 15 cm et une hauteur de 3 m.
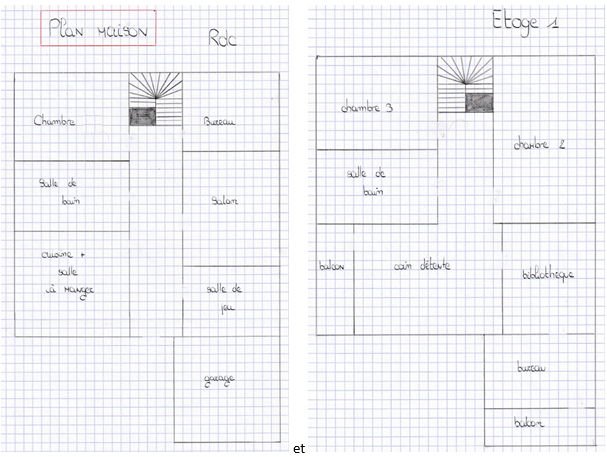
→ Un rez-de-chaussée de même surface que le sous-sol. Il se compose de trois pièces, chacune fermée par une porte de 80 cm de largeur ainsi qu’une porte d’entrée de 90 cm. A cet étage, il y a quatre fenêtres de largeur 70 cm. L’accès au premier étage se fait par l’intermédiaire d’un escalier.
→ Un premier étage composé de deux pièces, chacune fermée par une porte de 80 cm. Le sol de cet étage recouvre la même surface que les autres étages cependant il y a une petite ouverture d’environ 2 m² pour l’accès à l’escalier. De plus, il y a deux fenêtres de 70 cm.
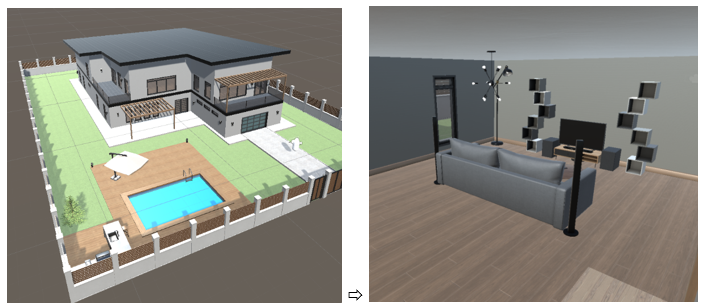
→ Dans notre étude, nous considérons que le bâtiment n’a pas de toiture et ainsi, que la structure est ouverte pour simplifier les calculs.
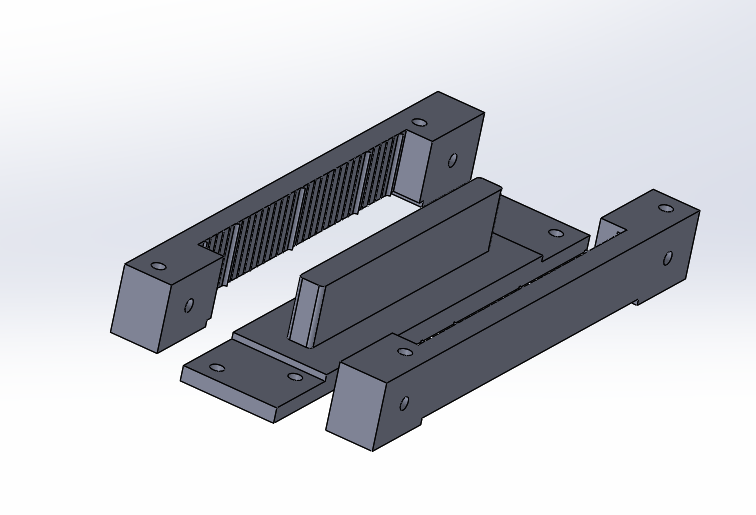
Nous vous proposons ci-contre un aperçu de cette modélisation 3D :
- Les combinaisons de charges
Après avoir calculé les charges appliquées au bâtiment, nous cherchons les combinaisons de charges.
En appliquant les combinaisons de charges, nous vérifions la structure à la ruine, à l’état ultime. Autrement-dit, on utilise le calcul à l’État Limite Ultime (ELU) de
l’Eurocode. On calcule ainsi la résistance de la structure (peu importe ses déformations) dans la situation la plus critique possible. Les charges sont majorées et les caractéristiques mécaniques des matériaux sont minorées.
Cependant, pour qu’une structure soit apte à l’utilisation, il est nécessaire qu’elle
respecte la condition de calcul de l’ELU mais également qu’elle ne soit ni trop souple, ni trop déformable. Pour contrôler ces caractéristiques, il faut tester la déformation des éléments qui la composent (planchers, dalles et poutres) sous l’effet des actions auxquelles elles sont soumises. Lorsqu’une construction est sollicitée, cette déformation ne pourra pas dépasser une certaine limite représentée par des flèches trop importantes sur la figure ci-dessous
En utilisant les termes de l’Eurocode, nous vérifions la structure à un État Limite
de Service (ELS).
Selon les ouvrages, le calcul à l’ELS ou à l’ ELU mène à des sections d’armatures différentes, on retient toujours la section la plus importante (généralement issue du calcul à l’ELS).

Schéma des efforts appliqués à une poutre
3 – Résultats de l’étude de cas
D’après nos recherches théoriques, nous pouvons conclure que la solution la plus adaptée pour réduire les risques sismiques sur un bâtiment est une combinaison de plusieurs éléments de construction.
Cela comprend :
- la forme du bâtiment (forme simple, structure monolithique et contreventement)
- l’utilisation de joints parasismiques
- l’utilisation de joints de dilatation
- l’isolation à la base, qui permet de dissocier les mouvements entre le bâtiment et le sol.
Après l’analyse de nos recherches, nous avons déterminé une solution adaptée à la construction d’un bâtiment parasismique : l’utilisation du caoutchouc. Il est reconnu comme étant le matériau le plus déformable. En effet, il peut être utilisé pour isoler les fondations grâce à des isolateurs sismiques de type NRB, HRB et LRB fabriqués à base d’élastomères.
L’application de ces paramètres de construction doit également prendre en compte les règles de constructions parasismiques ainsi que les recommandations détaillées par l’Eurocode 8.
Malgré le coût de l’aménagement, le bâtiment est alors en état de résister aux secousses sismiques. Ainsi, l’impact économique lié aux dégâts est négligeable.
Le résultat final est conforme avec le cahier des charges car nous avons modélisé une habitation en 3D pour ensuite calculer les charges à appliquer ainsi que les combinaisons de charges. Cependant, nous n’avons pas eu accès à la licence Revit pour obtenir le résultat des efforts tranchants et des moments fléchissants.
4 – CE QUE CE PROJET NOUS A APPORTÉ
Nous avons eu une centaine d’heures en autonomie pour réaliser ce projet. Le travail en autonomie nous a permis une grande liberté et beaucoup d’autonomie, mais a exigé de nous une certaine discipline et de la rigueur.
La majeure partie de notre temps a été consacrée aux recherches et à l’approfondissement de la problématique.
Pour la suite du projet, nous voulions réaliser quelque chose de concret. Nous avons donc décidé de modéliser une maison et de simuler un séisme sur cette dernière sur le logiciel Revit. Concernant cette partie, la difficulté a été de prendre en main les différentes fonctionnalités du logiciel de modélisation 3D.
Nous avons considéré ce travail de groupe comme un véritable entraînement. En effet, en tant que futures ingénieures, il est pour nous enrichissant de travailler en équipe sur des projets.
En revanche, en raison du manque de la licence Revit, nous n’avons pas pu passer du théorique au concret. En commençant ce projet, nous nous attendions à une réalisation plus matérielle.
6 – REMERCIEMENTS
Nous remercions Mme Chahine et M. Lagrange pour leur encadrement tout au long de ce projet.
_________________________________
Blog réalisé par Anaïs TREPS, Clarisse LEFFRAY et Bertille LEDOUX