Bienvenue sur notre blog !
Nous sommes Julie CLODORÉ et Tom OUVRARD et nous nous sommes intéressés durant plusieurs mois à la sécurité incendie. En effet, de nombreux outils jouent un rôle majeur lors de la lutte contre un incendie.
Parmi les systèmes d’extinction, les alarmes et les installations, de nombreux moyens existent et ils doivent tous respecter des lois et normes assez strictes. Nous avons pu les étudier en détails durant le premier mois de notre projet et ainsi comprendre l’importance d’un plan d’évacuation, qui permet d’éloigner et mettre en sécurité les victimes face au feu.
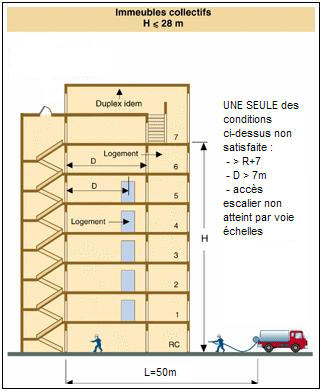
Nous allons ici, essayer d’en concevoir plusieurs pour un immeuble comportant 8 étages et 2 sous-sols; ce qui le place dans la famille 3B des bâtiments d’habitation.
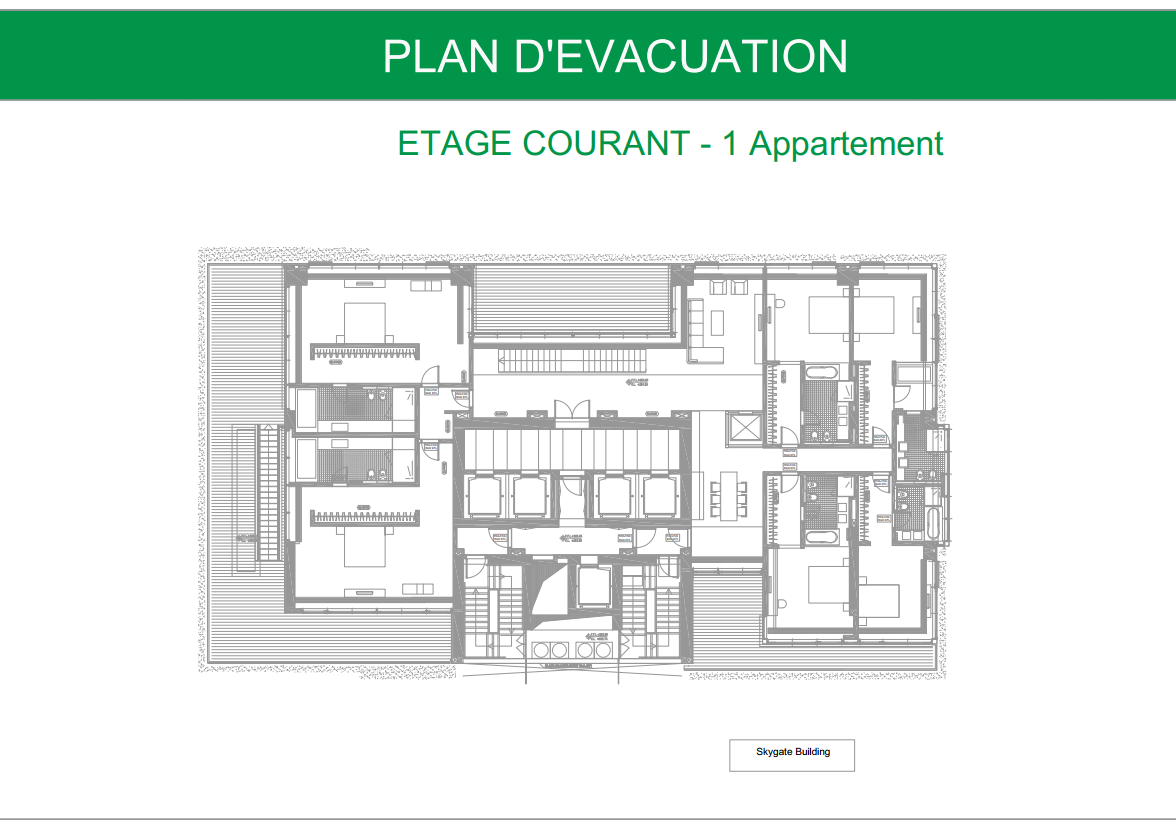
Pour la réalisation de nos plans d’évacuation, nous avons eu pour chaque étage, un plan vierge en vue de dessus, que nous avons complété au fur et à mesure. Nous avons décidé de travailler à la main, à l’aide de ProCreate, car nous trouvions cela plus libre.
Installation et emplacement
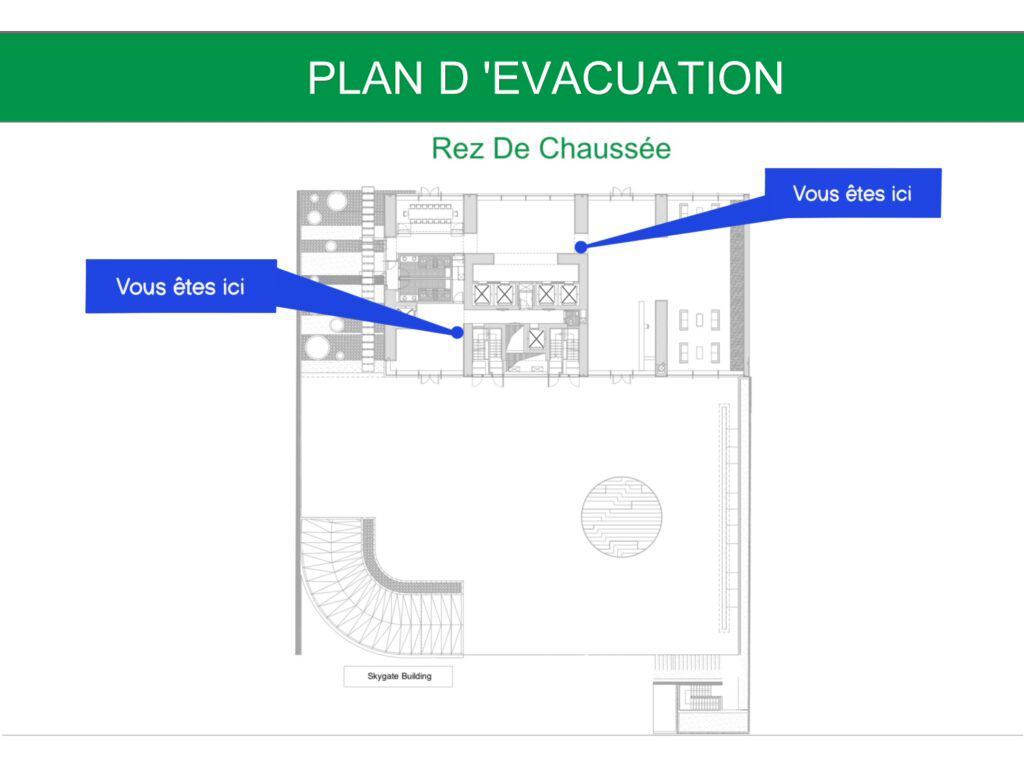
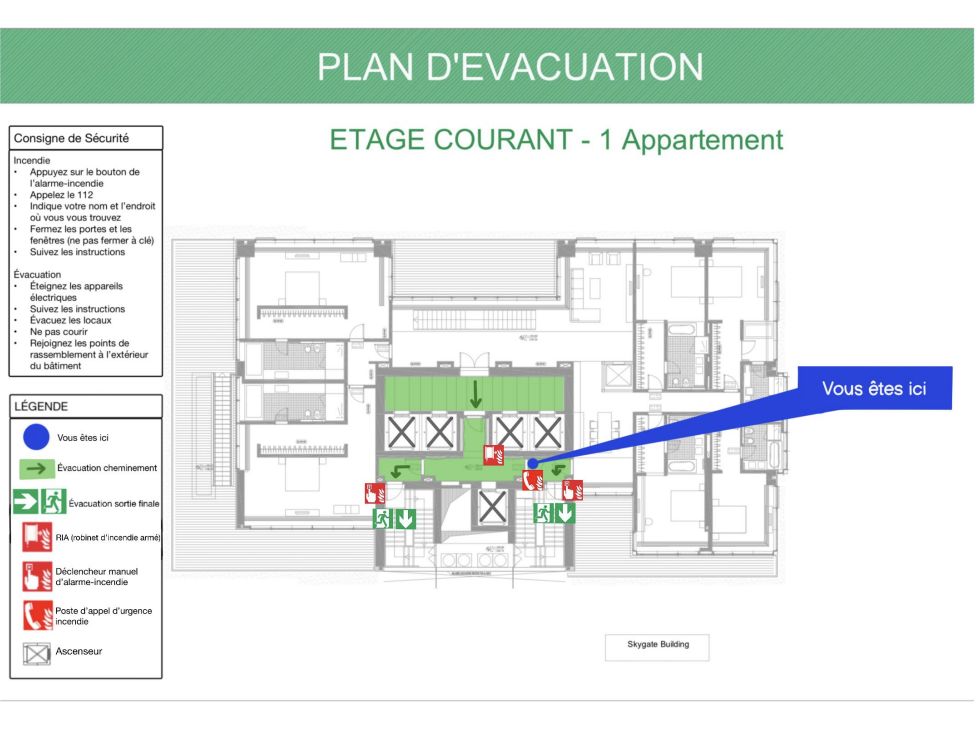
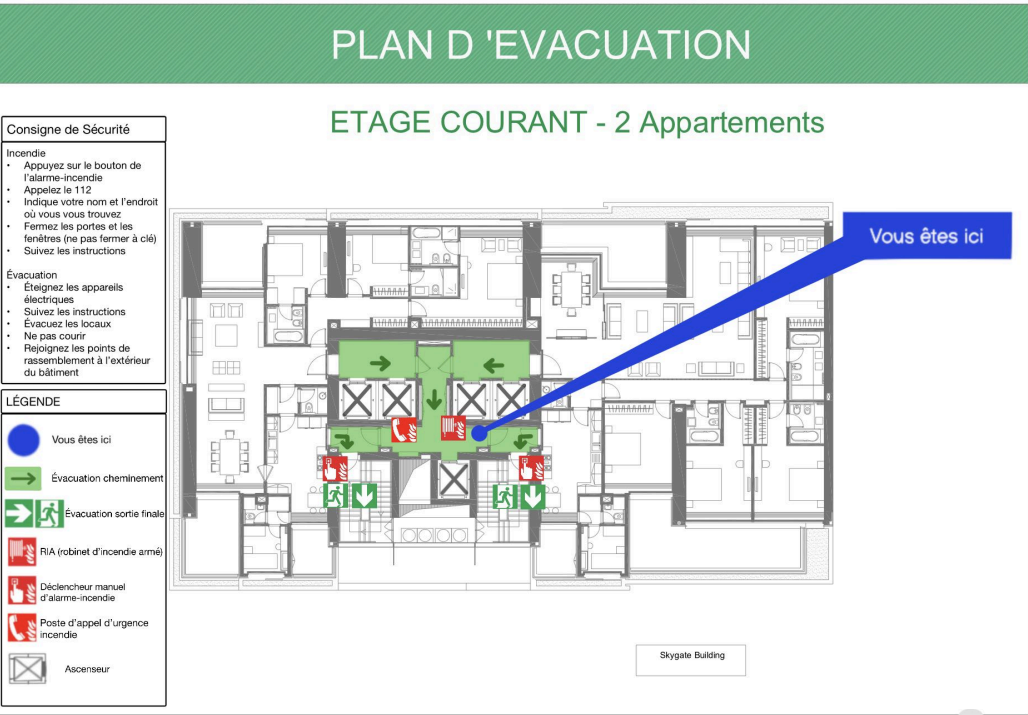
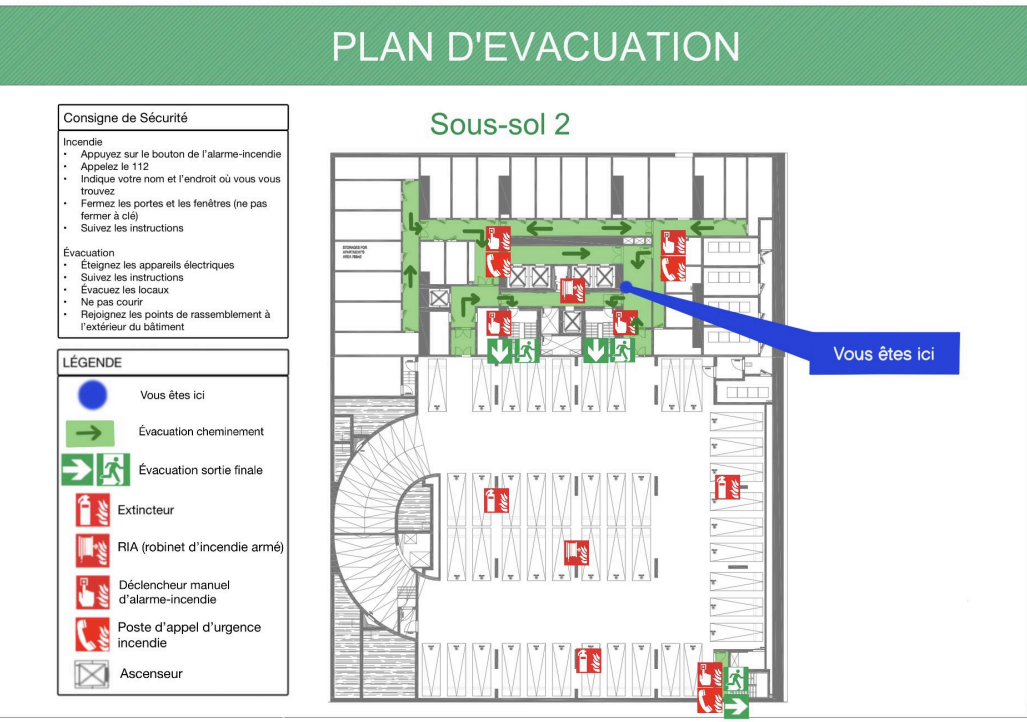
Pour être efficace, un plan d’évacuation doit pouvoir être vu et connu de tous. C’est pour cela qu’il doit être installé à des emplacements où les habitants pourront se familiariser avec les procédures à suivre en cas d’incendie. De plus, ils doivent être installés à chaque étage aux principaux points d’accès, ainsi qu’à proximité des escaliers et ascenseurs et enfin aux principales jonctions et intersections. Il y aura donc plusieurs plans d’évacuation par étage, il est donc important d’indiquer l’endroit où celui-ci se trouve avec une indication “Vous êtes ICI” pour que la personne qui le lis ai une meilleure vision de là où elle se trouve.
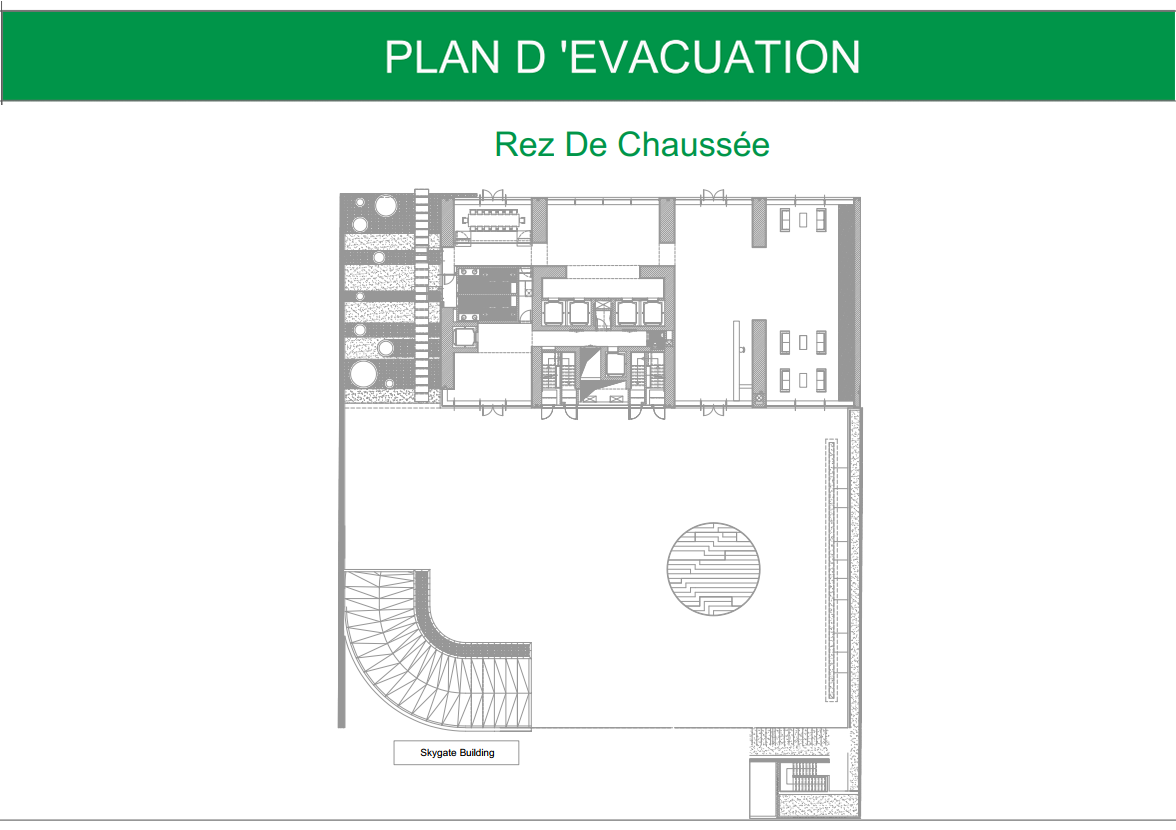
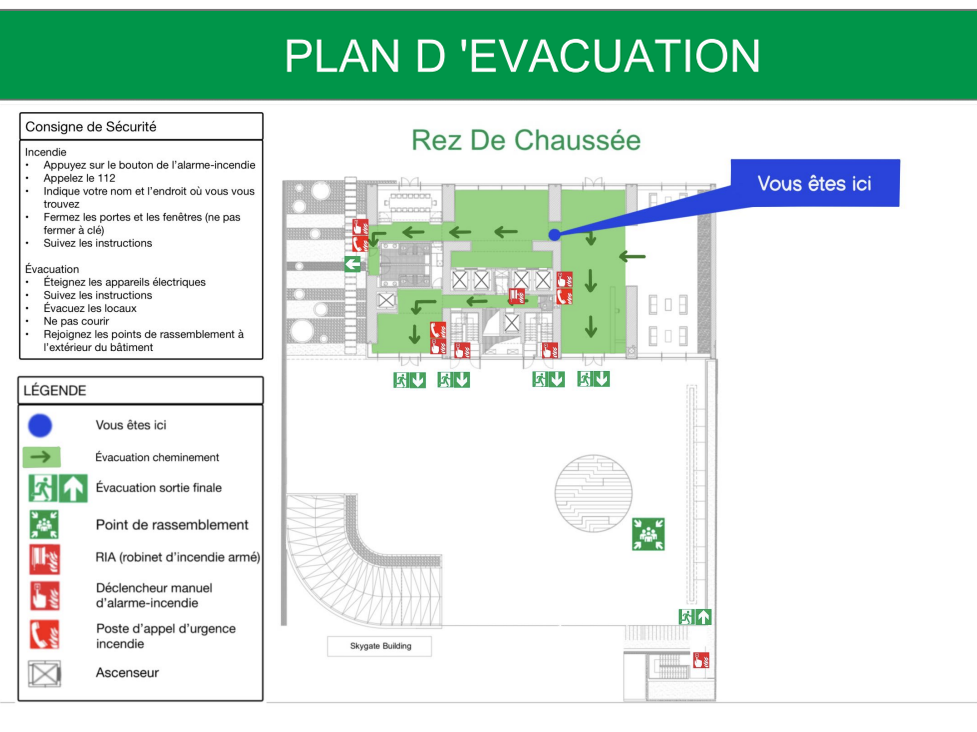
Voici un exemple des 2 “Vous êtes ICI” pour le rez-de-chaussée:
Concernant la hauteur, ils doivent être situé au minimum à 1,5 mètre du sol, dans un format minimum A3.
| Dimensions du plan d’évacuation | hauteur du plan d’évacuation | hauteur de l’en-tête | hauteur de la lettre capitale |
|---|---|---|---|
| 297×420 (A3) | 297 | 21 | 13 |
| 420×594 (A2) | 420 | 30 | 18 |
| 594×841 (A1) | 594 | 42 | 26 |
| 841×1189 (A0) | 841 | 59 | 36 |
Concernant les couleurs principales des consignes et instructions de sécurité, un plan d’évacuation doit respecter la norme NF ISO 3864-1. Le fond doit être blanc et il peut être photoluminescent, en suivant la norme NF X 08-050-2 (Vous pouvez retrouver toutes les normes en annexe, en bas de la page)
Pour les parties de consignes traitant de:
- Sécurité incendie, les dominantes doivent être rouge
- Évacuation, les dominantes doivent être verte
- Avertissement de danger, les dominantes doivent être jaune
- Obligation, les dominantes doivent être bleu
Voie d’évacuation
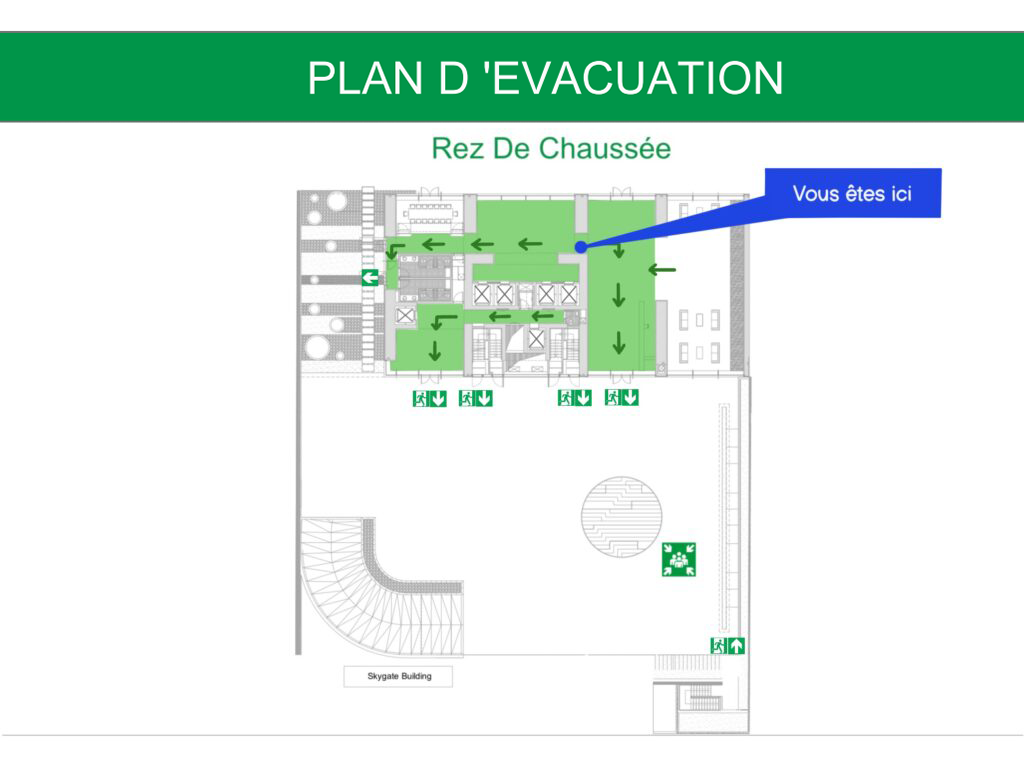
Concernant les voies d’évacuation, nous avons commencé par colorer en vert les principales voies d’évacuation, c’est-à-dire les grands couloirs menant vers les sorties ainsi que les grands espaces d’évacuation. Puis nous les avons fléché afin de savoir quelle direction suivre, pour se diriger vers les sorties de secours. Enfin, nous avons mis les signalisation d’issue de secours sur les sorties menant à l’extérieur, puis les points de rassemblement.
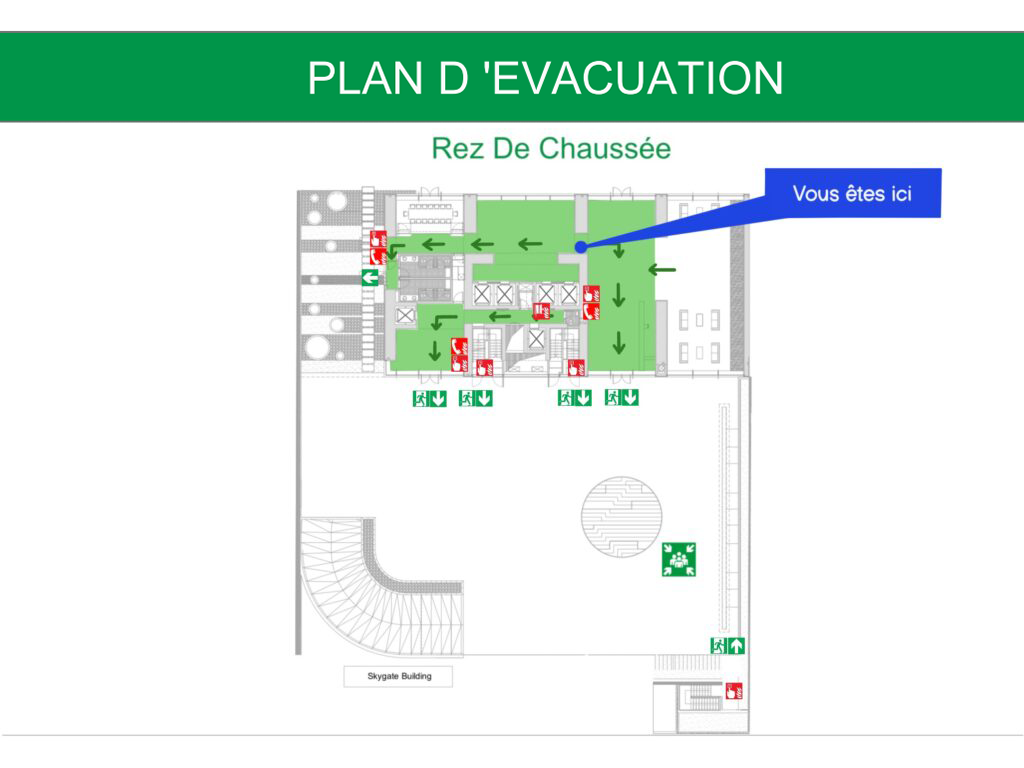
Équipement de lutte
Nous avons ensuite dû choisir les endroits où positionner les déclencheurs manuels d’incendie, les robinets incendies armées (RIA), ainsi que les extincteurs ou encore les postes d’appels d’urgences.
Pour pouvoir placer les déclencheurs manuel d’incendie, nous avons pris en compte trois critères:
Déclencheur manuel d’incendie :
- Les intersections importantes; il faut qu’il soit visible et facile d’accès lors de l’évacuation
- Lieux de passage fréquemment utilisé
- Tous les escaliers de secours
Robinet incendie armée :
Pour les robinets incendies armées (RIA), nous savons qu’ils ont chacun une longueur maximale de 30 mètres, donc nous les avons placé dans le but de couvrir l’ensemble de l’étage.
Pour faciliter la mise en place, nous les avons placé de manière à ce qu’il y ait besoin d’uniquement un seul conduit pour l’ensemble des RIA. C’est pour cela qu’ils sont les uns au dessus des autres.
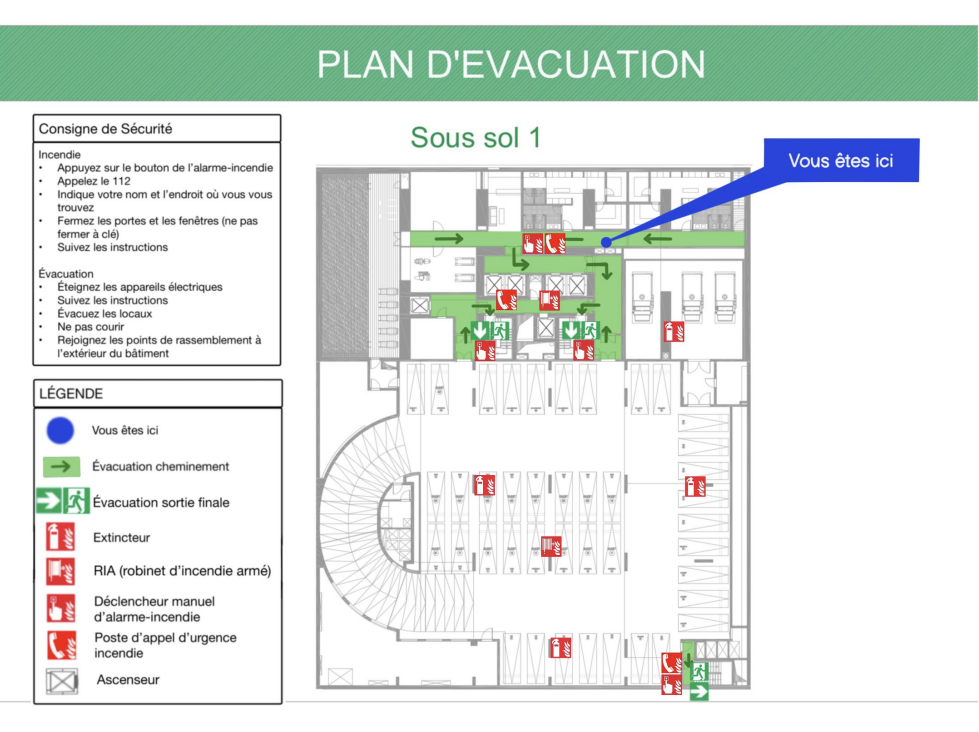
Extincteur :
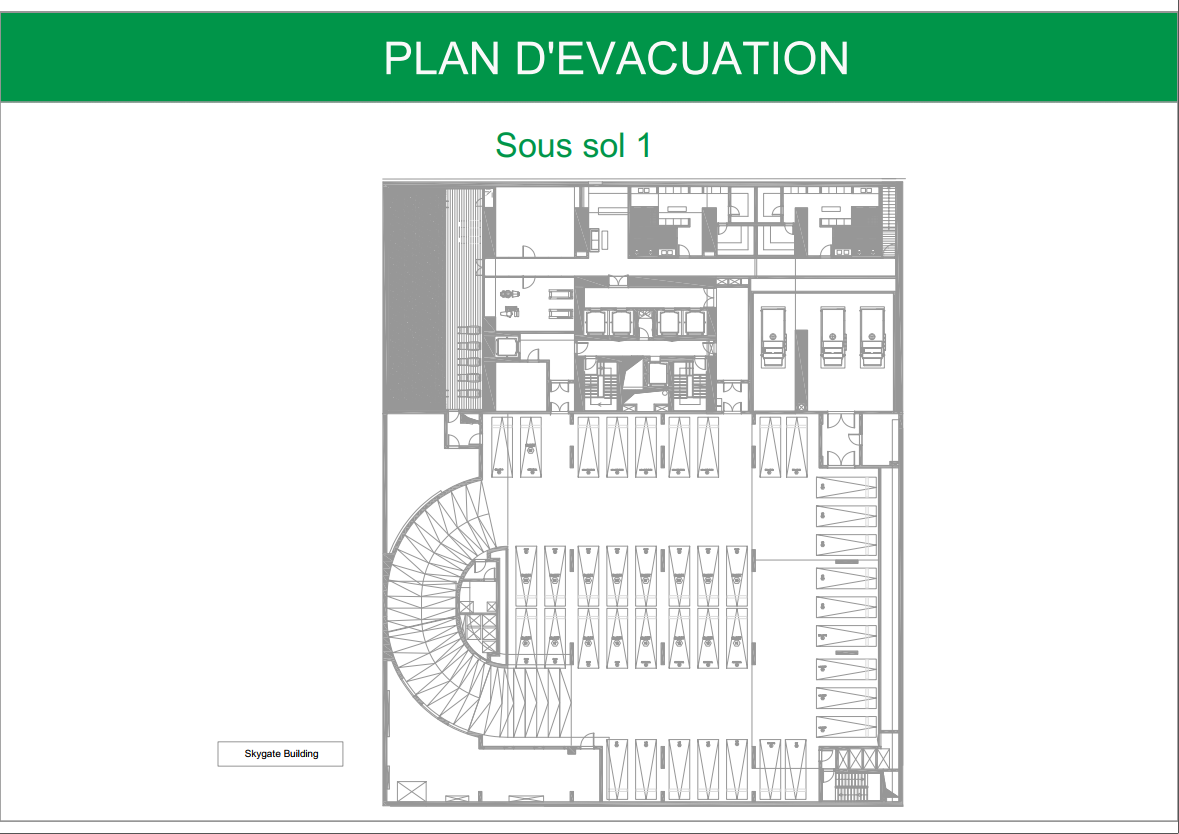
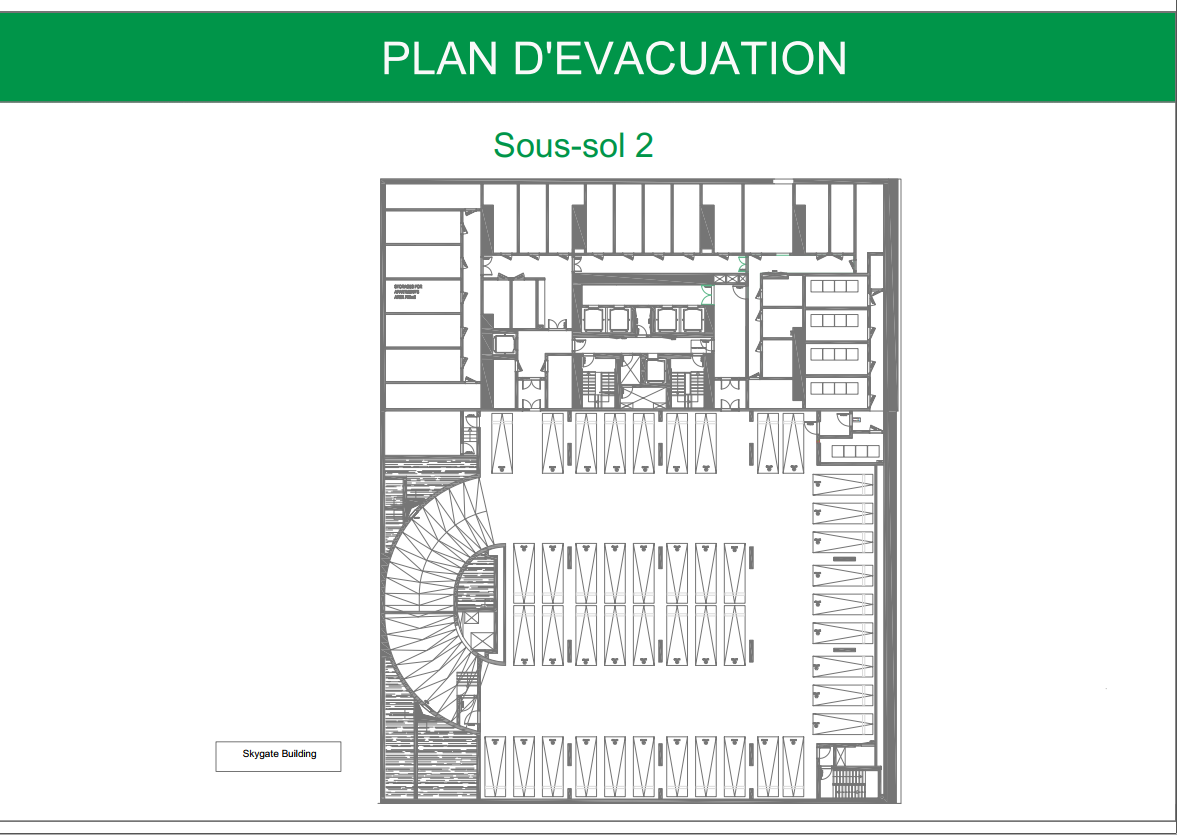
Les extincteurs ont été plutôt faciles à placer car il n’existe aucune obligation pour les bâtiments de la famille 3B, hormis pour les parcs de stationnement. La seul réglementation pour ces derniers est d’avoir 1 extincteur de 6 litres pour 15 places de parking. Dans notre cas nous avions 41 places dans le premier sous-sol puis 45 places dans le deuxième sous-sol, nous en avons donc répartie 3 dans chaque parking. Ils ne sont pas situé le long des voies pour les voitures, afin de ne pas gêner le passage et ils sont suffisamment espacés pour couvrir l’ensemble du parc de stationnement.
Nous avons aussi dû en placer dans la chaufferie, au 1er sous-sol, afin de respecter l’article 57 de la réglementation pour les bâtiment d’habitation.
Enfin nous ajoutons la légende ainsi que les consignes de sécurité à adopter.
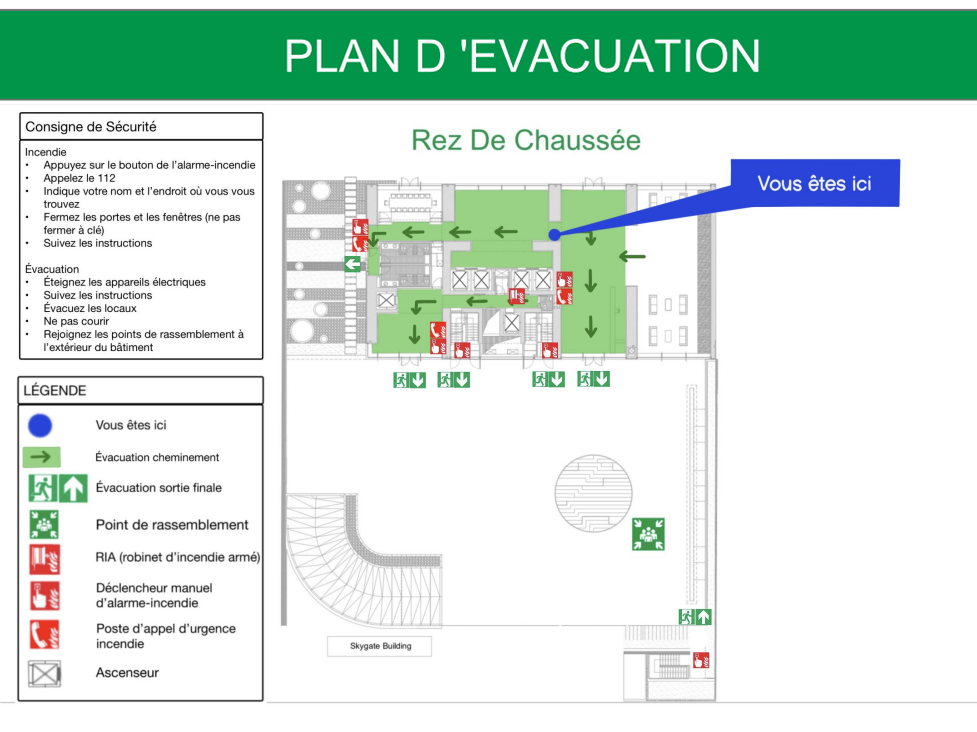
Plans finaux
Voici une petite vidéo montrant toutes les étapes que nous avons suivies pour la conception du plan d’évacuation du rez-de-chaussée !😊
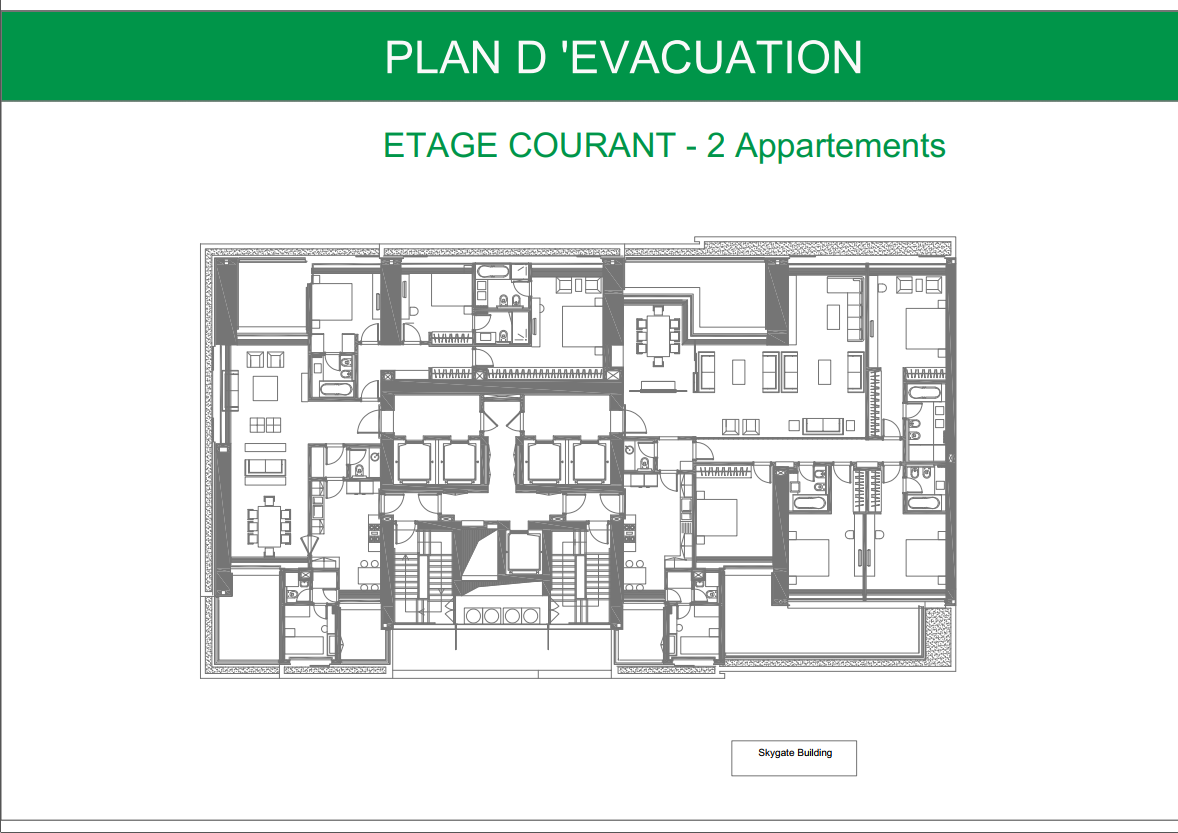
Et voici les plans finaux de chaque étages.
Vous pouvez retrouver sur ce lien Google Drive tous les plans que nous avons fais avec tous les différents “Vous êtes ici” de chaque étage:
Problèmes rencontrés
Nous avons rencontré seulement le problème d’AutoCad où nous étions dans l’incapacité de nous connecter dessus. Pour y remédier, nous avons donc décidé de travailler sur une tablette, sur l’application ProCreate, qui nous a permis de colorer les plans et d’insérer les symboles.
Commentaires
JUlie
Ce projet a été intéressant à concevoir, car il m’a permis d’étudier des plans de bâtiment, les comprendre et les modifier dans un but précis. Voulant intégrer une spécialité dans la construction, j’ai trouvé tout aussi intéressant de travailler sur un immeuble d’habitation qui peut servir à la population.
Tom
J’ai trouvé le projet vraiment intéressant car il correspond à la spécialité dans laquelle je veux poursuivre mes études. Il m’a permis de découvrir les normes d’un bâtiment lors de sa construction et les équipements techniques pour lutter contre un incendie.
Si vous souhaitez en savoir plus sur les différentes normes et lois sur les bâtiments contre les risques incendie; voici le rapport de notre projet.