Nous sommes Bilal, Mélissa et Rémi, 3 étudiants en seconde année de classe préparatoire à Polytech Angers. Dans le cadre de notre cursus, nous avons choisi de réaliser un solveur de Rubik’s Cube. Pour cela, nous étions accompagnés de notre tuteur M. Lagrange.
Après un semestre de projet, voici le résultat final que nous avons obtenu :
Vidéo de notre projet final
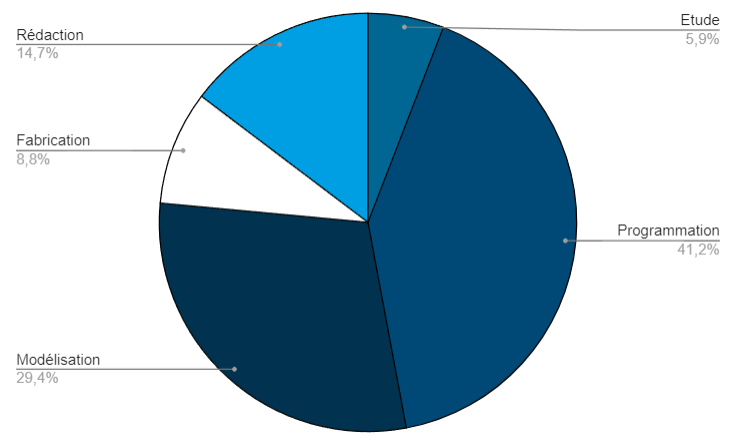
Pour fabriquer ce solveur, nous nous sommes répartis le travail, et nous avons séparé notre projet en plusieurs parties :
Etude
Conception CAO
Programmation
Montage
L’Étude
Pour commencer, nous avons réfléchi à la façon de concevoir le solveur et avons procédé à des recherches.
Nous n’avions pas de contrainte spécifique pour notre projet, le but n’étant pas d’atteindre des performances de compétition, notamment en termes de vitesse.
Ainsi, nous avons choisi les fonctionnalités suivantes :
une interface graphique permettant de donner des instructions au robot.
l’utilisation de la méthode de résolution classique pour le solveur.
la possibilité pour le robot de mélanger le Rubik’s Cube tout seul.
le fait de ne pas utiliser de capteur pour connaître l’état du cube : celui-ci est entré par l’utilisateur au lancement du programme.
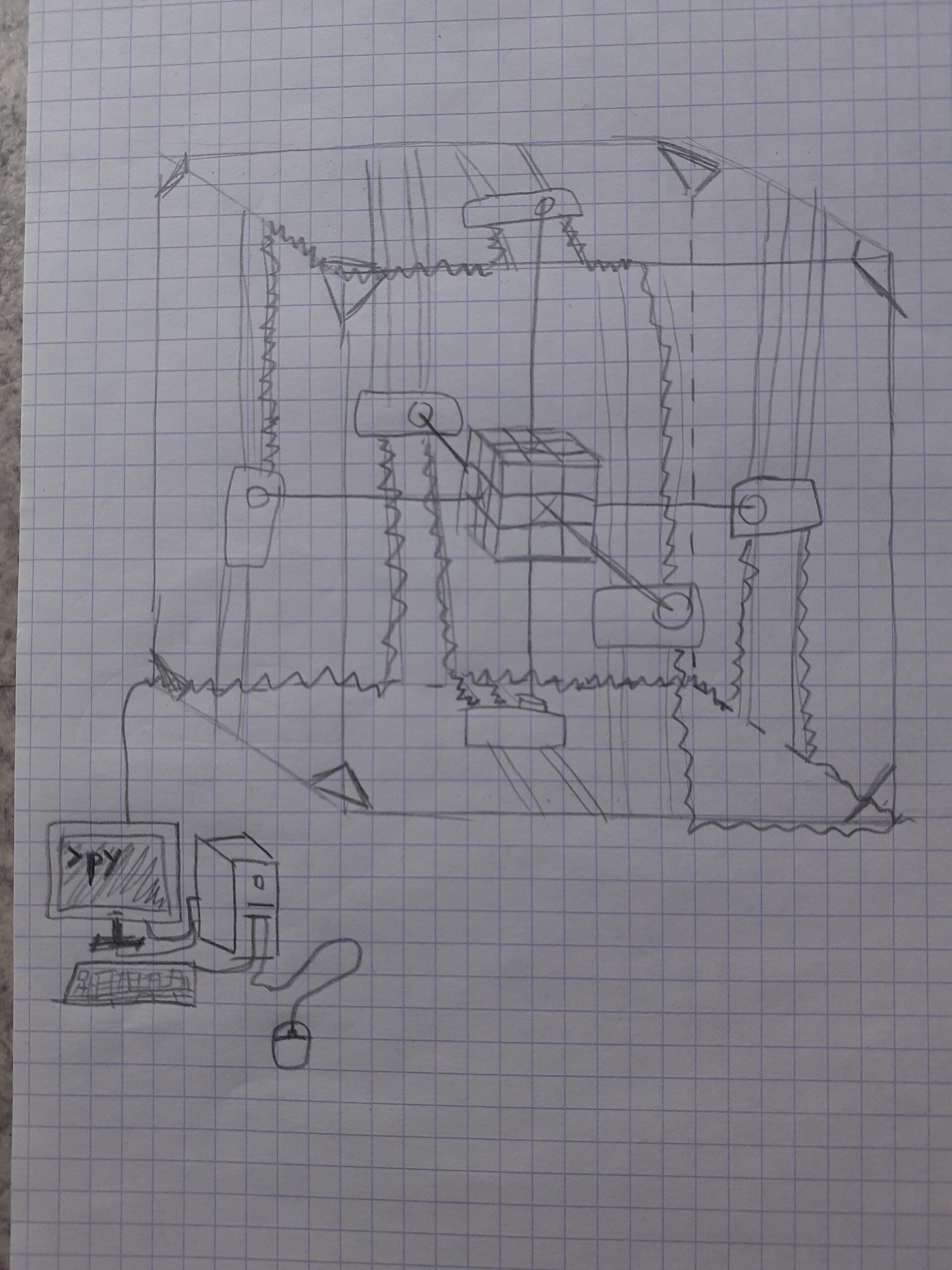
Premier Schéma réalisé du solveur
Afin de mettre ce cahier des charges en application, nous avons opté pour une structure cubique entourant le Rubik’s Cube, avec un moteur pour chaque face.
Pour cela, nous avons eu besoin de :
MakerBeams (équerre, profilé, cube coin)
Un Rubik’s cube
6 moteurs Dynamixel AX-12A
un starter kit Dynamixel
Nous avons choisi les moteurs Dynamixel que M. Lagrange nous avait recommandé car ils correspondaient à nos critères.
La Conception CAO
Lors de la partie conception, nous avons réalisé à l’aide de SolidWorks, un logiciel de CAO, les différentes pièces nécessaires pour la structure de notre projet. Cela nous a permis de nous assurer que le solveur était faisable.
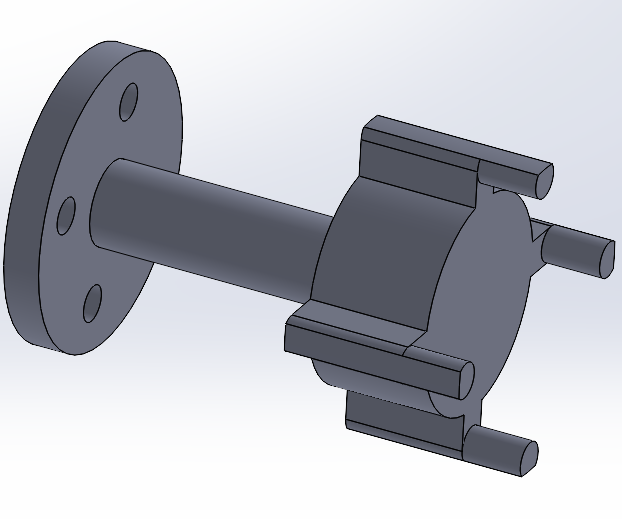
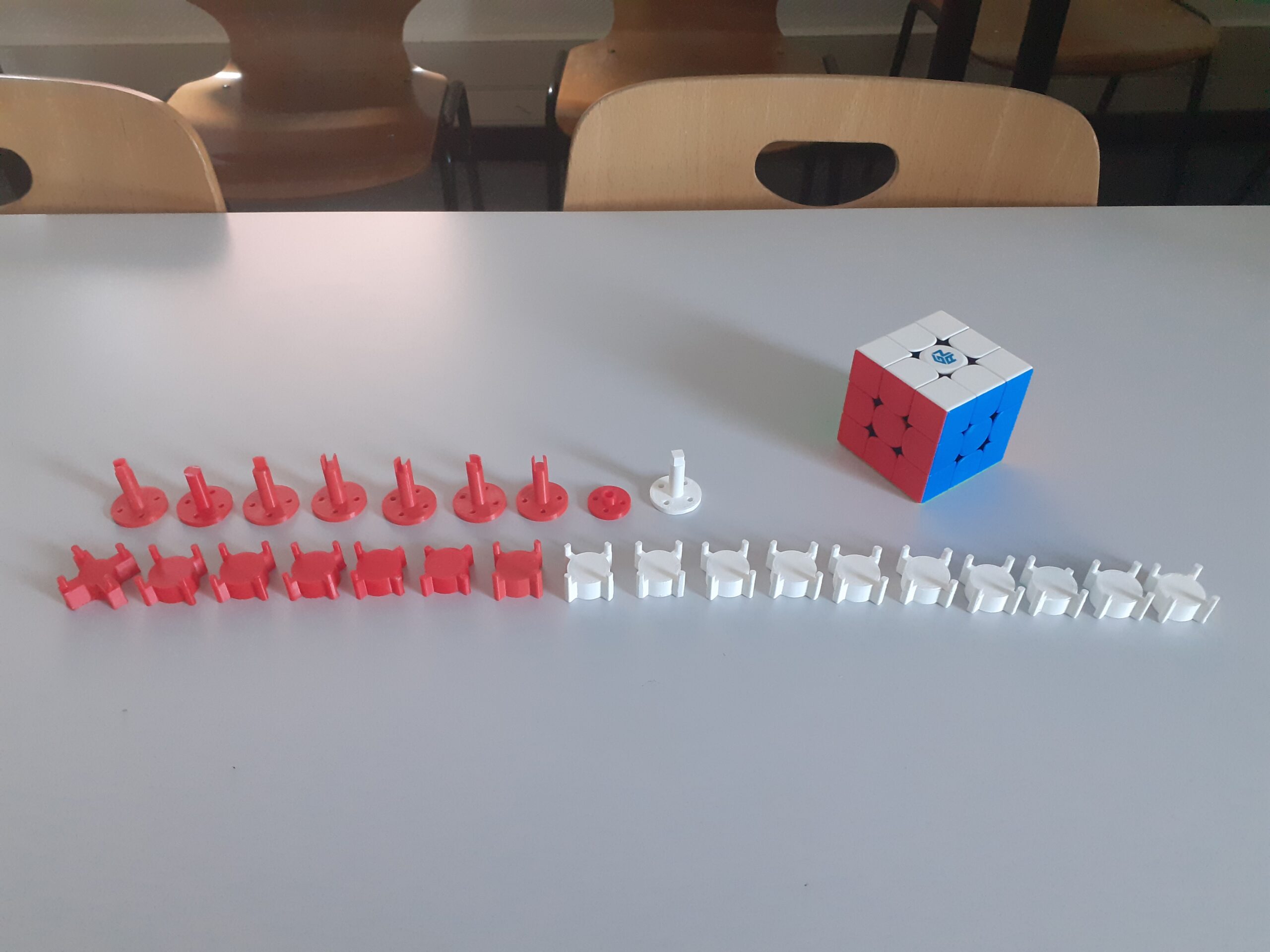
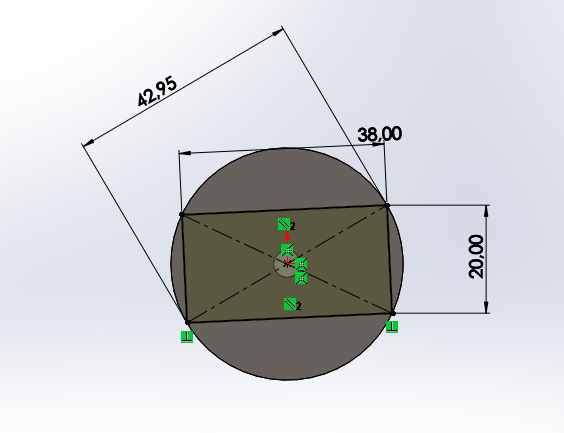
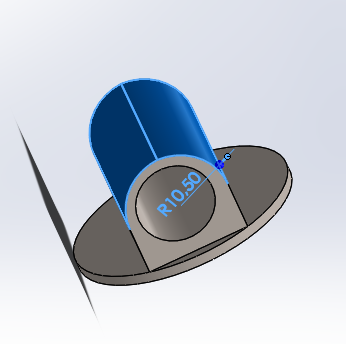
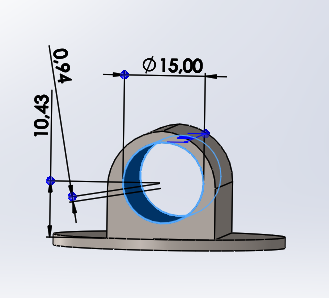
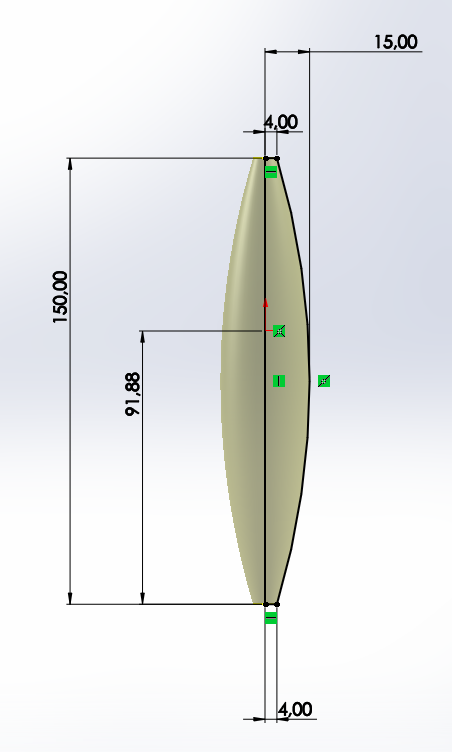
Cet assemblage contient des pièces de notre création imprimées en 3D, qui relient les moteurs et le Rubik’s Cube. Nous avons donc dû tester plusieurs prototypes différents afin de voir lequel fonctionnerait le mieux.
Assemblage 3D représentant la pièce reliant le Rubik’s Cube au moteur
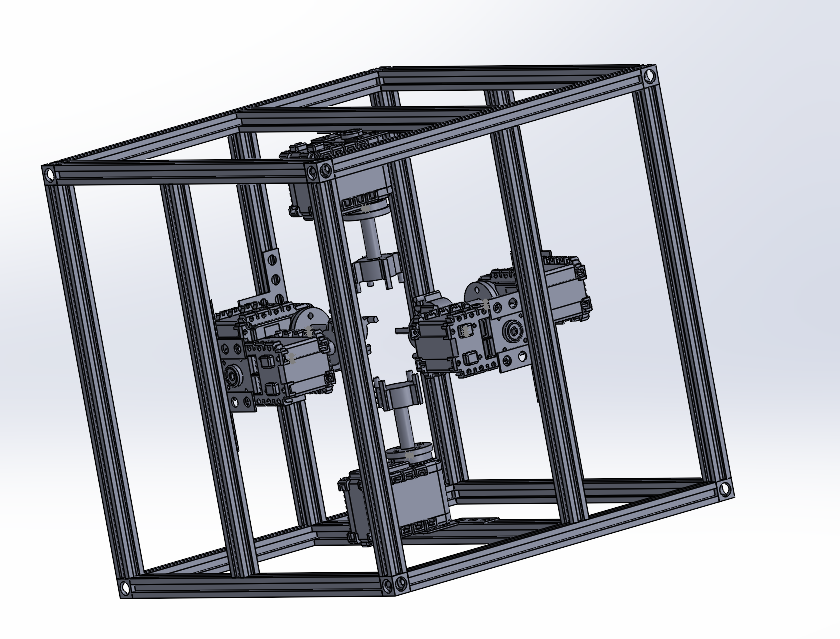
Assemblage final du solveur sur SolidWorks
Différents prototypes des pièces imprimées en 3D
La Programmation
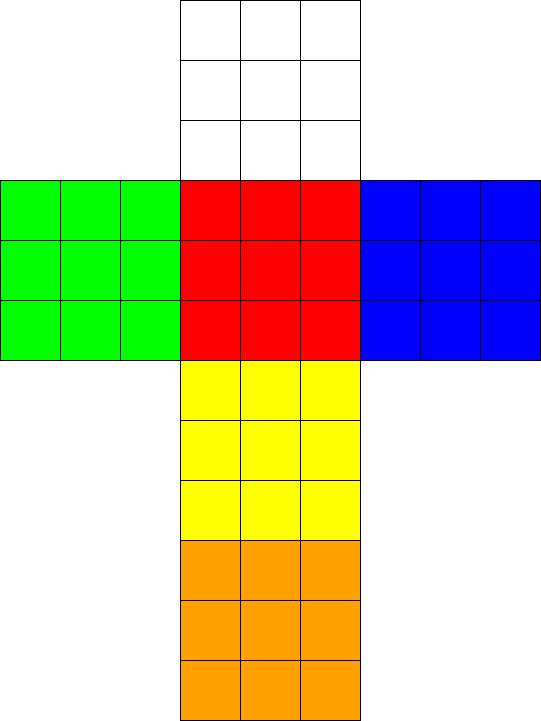
Patron du cube
Pour le programme, nous avons suivi la méthode de résolution classique d’un Rubik’s cube car c’est cette méthode que nous connaissons le mieux. Pour ce faire, nous avons réalisé une simulation du Rubik’s Cube en Python à l’aide d’un patron du cube.
La méthode classique résout le cube étage par étage, nous avons donc divisé le programme en plusieurs fonctions simples pour chaque partie de la résolution.
Le cube étant bloqué dans la structure, nous avons ajouté un programme qui permet de le mélanger aléatoirement pour qu’il puisse fonctionner en autonomie.
Afin de lier les moteurs au programme, nous avons dû utiliser une bibliothèque python distribuée par Dynamixel.
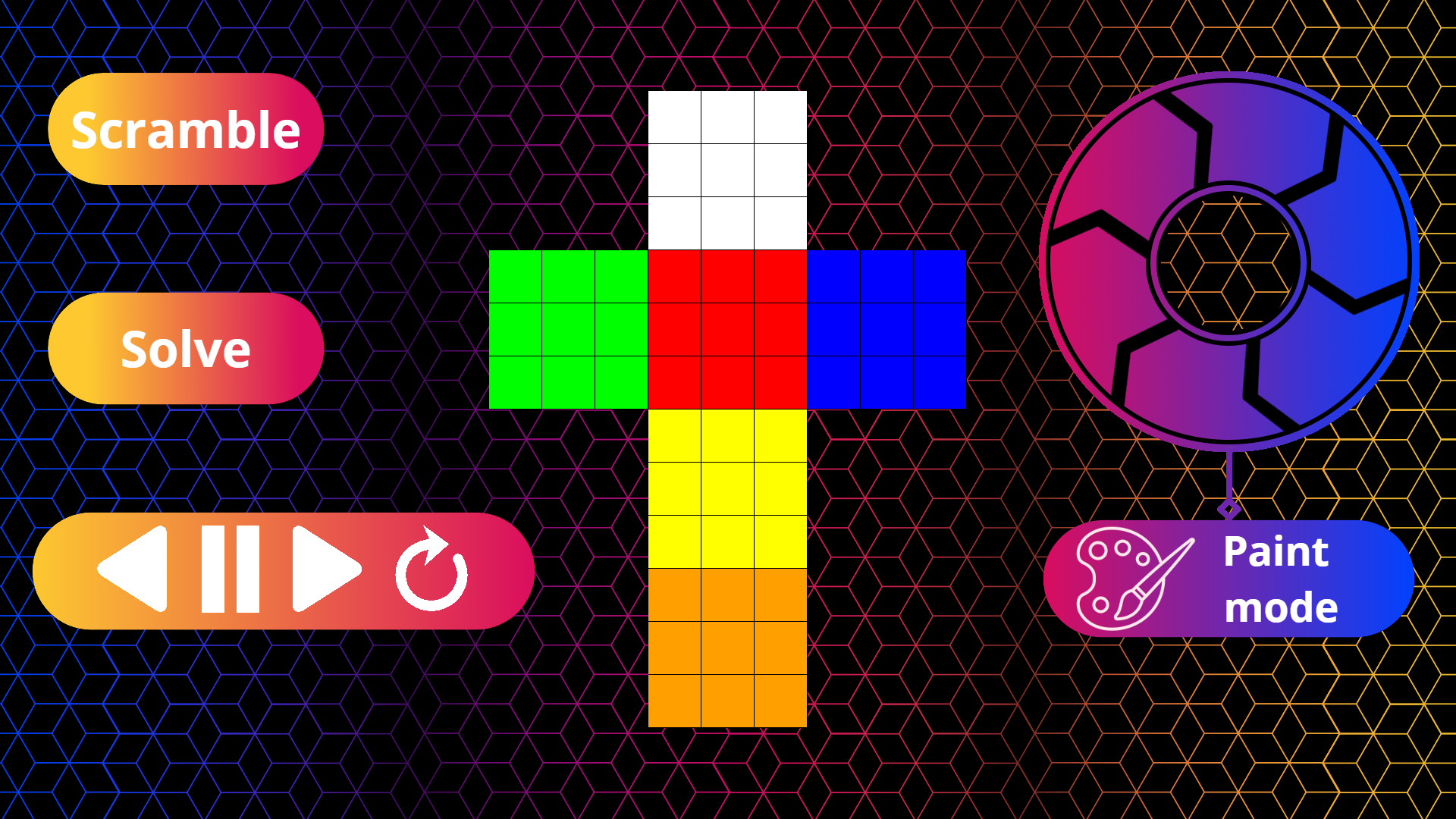
Pour finir le programme, nous avons ajouté une interface grâce à pygame (bibliothèque graphique) permettant de donner des instructions au programme et de relier les différentes parties.
Version finale de l’interface de notre programme
Le Montage
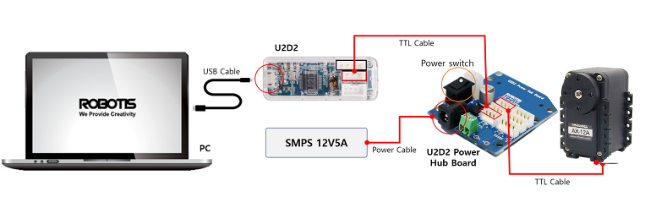
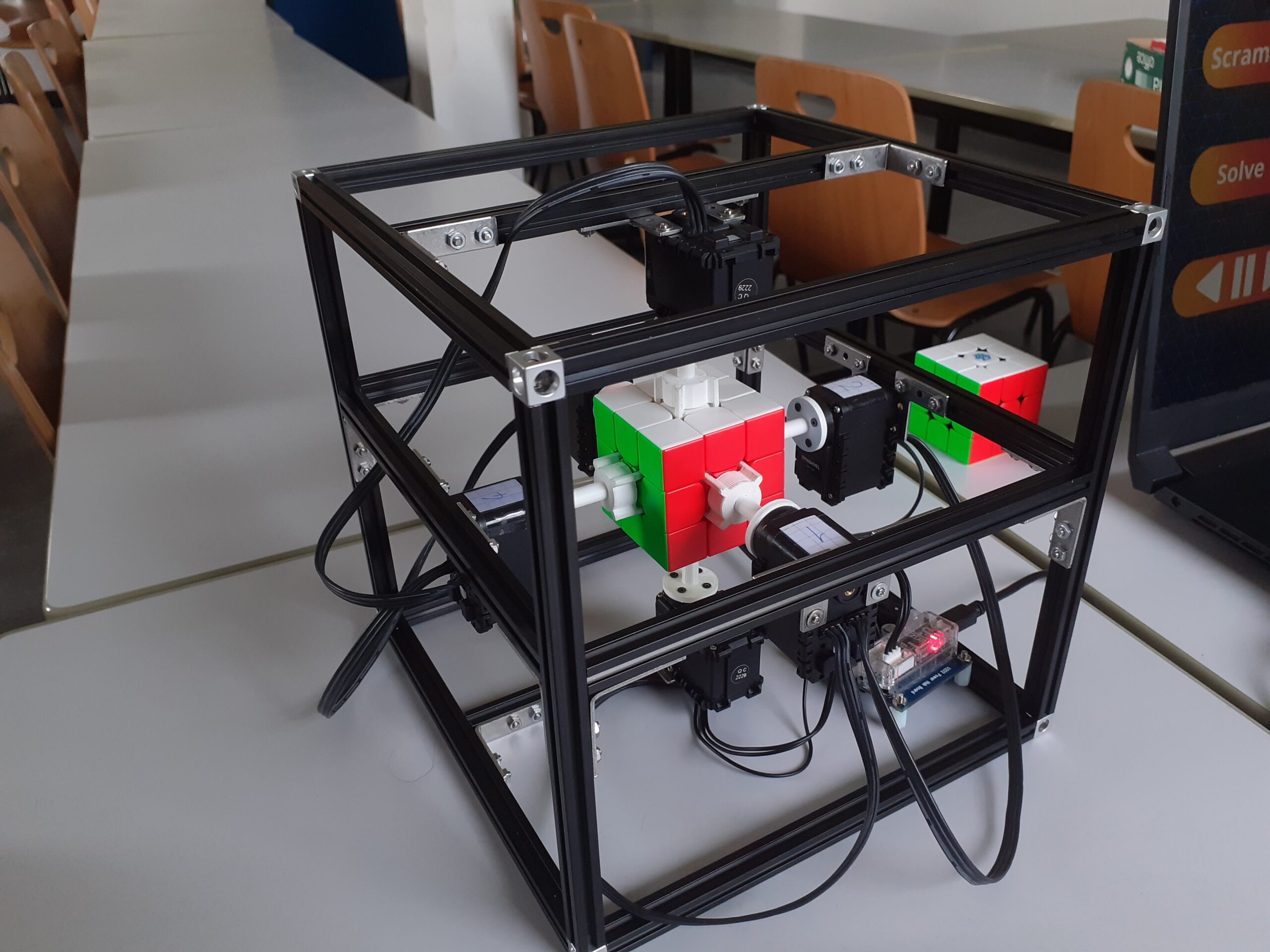
L’assemblage à réellement commencé avec l’arrivé des moteurs. Nous avons pu construire une structure en MakerBeams pour les tenir. Ensuite, nous avons relié les moteurs en série, et l’un d’eux à la carte, pour qu’ils puissent être connectés au programme.
Branchement entre moteur et ordinateur
Solveur final
Conclusion
Finalement, nous avons réussi à construire un solveur de Rubik’s Cube capable de mélanger et résoudre un Rubik’s Cube. Cependant, nous avons pu remarquer que dans certaines situations, les faces ne tournaient pas en raison de l’imprécision de la pièce reliant le moteur et le cube. Il faudra donc l’améliorer pour éviter ce défaut.
Nous avons trouvé ce projet très intéressant car il nous a permis de nous améliorer en programmation et en modélisation 3D. De plus, l’aspect concret nous a permis de voir l’avancement de notre projet. Enfin, cela nous a permis de travailler en équipe et en autonomie des compétences qui nous serons très importantes dans notre futur professionnel.
Si vous souhaitez en savoir plus, vous trouverez notre rapport ci-dessous
Nous sommes Maël, Hugo et Nathan, trois étudiants en deuxième année du cycle préparatoire à l’école Polytechnique de l’Université d’Angers.
Avant toutes choses nous tenons à remercier toutes les personnes qui ont contribué à la réalisation de ce projet.
Nous voudrions dans un premier temps remercier, Rima AL ARIDI et Bassel CHOKR, les deux doctorants que nous avons assisté pendant ce projet et qui nous ont appris de très nombreuses notions avec une grande pédagogie malgré la barrière de la langue. Nous les remercions aussi pour leurs conseils, leur bienveillance et leur patience.
Ensuite nous voudrions remercier Hassan BOULJROUFI, assistant ingénieur électronique, pour son expertise sur la partie électrique et électronique du projet ainsi que pour ses nombreux conseils vis-à-vis de l’apprentissage de LabVIEW, de la réalisation de notre rapport et de notre rôle en tant qu’étudiant de deuxième années.
Enfin nous remercions Thierry LEMENAND, enseignant chercheur et responsable du projet, pour nous avoir donné la possibilité de travailler avec toutes ces personnes au sein de ce projet qui nous dépasse en tant qu’étudiant de deuxième années.
Contexte :
Lorsque l’on parle des principaux secteurs émetteurs de gaz à effet de serre, on évoque souvent le secteur du transport ou celui de l’industrie. Pourtant il existe d’autres secteurs occupant une part importante des émissions de gaz à effet de serre, comme le secteur du bâtiment. En effet, d’après les chiffres du Ministère de la transition écologique, ce secteur représente 23% des émissions de gaz à effet de serre en France ainsi que 43% des consommations énergétiques annuelles françaises. Afin de réduire cet impact, il est donc impératif de rénover les bâtiments mal isolés ou de favoriser l’installation de systèmes énergétiques plus performants et plus sobres, comme la pompe à chaleur.
Cependant, la pompe à chaleur actuelle n’est pas un dispositif parfait en termes d’émissions…
Pourquoi la pompe à chaleur classique présente une imperfection majeure ?
En effet, afin de fonctionner correctement, la pompe à chaleur thermodynamique doit utiliser des fluides frigorigènes car ces fluides permettent de transférer les calories extérieures à l’intérieur de l’habitation en utilisant le principe de compression / décompression. Ces fluides ayant un potentiel de réchauffement très élevé, en comparaison le CO2 a un potentiel de 1, car c’est l’unité de référence créée par le GIEC, tandis que le fluide R32, le plus utilisé pour les pompes à chaleur, en a un de 675, selon l’AFCE.
Heureusement des solutions pour remédier à ce problème existent !
Le projet ARKTEA
C’est donc pour faire disparaître les émissions dues aux fluides frigorigènes que le projet ARKTEA est né. Ce projet est le fruit d’une alliance de 4 entreprises françaises :
Arkteos, spécialiste dans le fabrication de pompes à chaleurEquium, spécialiste dans le développement de pompe à chaleur thermoacoustiqueADNE, une bureau d’étude spécialisé dans différents domaines de la PhysiqueLaris, créateur du banc d’essai pour la pompe à chaleur
Le son au service l’environnement
Afin de remplacer les fluides frigorigènes et leur rôle au sein de la pompe, l’entreprise Equium a donc décidé de développer une pompe à chaleur utilisant le principe de la thermoacoustique. En effet, tout son est un mouvement d’ondes et comme on peut le voir sur l’animation suivante, ces ondes effectuent un mouvement de compression et de décompression ce qui permet de produire à la fois du chaud et du froid, tout comme les fluides frigorigènes :
Animation thermoacoutique
Bien évidemment, ce principe est naturel et n’émet quasiment pas de gaz à effet de serre.
“On pourrait se libérer de la menace climatique qui pèse sur nos têtes en changeant les règles du jeu, maintenant, en favorisant les écotechnologies comme la thermoacoustique.”
Pourquoi trois étudiants de Polytech Angers ont un rôle à jouer dans ce projet ?
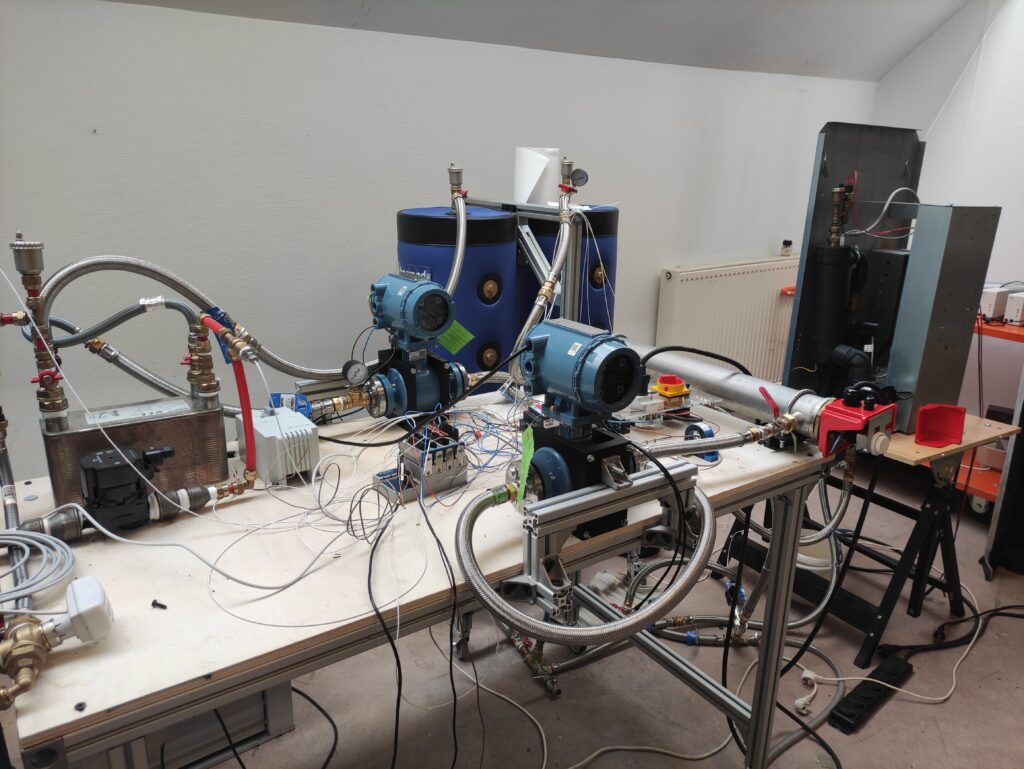
Comme dit précédemment, le laboratoire Laris participe à ce projet avec la création d’un banc d’essai pour la pompe à chaleur.
Ce banc constitue le projet de thèse de deux doctorants Libanais, Bassel et Rima. En tant qu’étudiant de deuxième année, nous avions plusieurs objectifs sur ce projet dont deux principaux. La première partie de notre travail consistait à réaliser l’acquisition de plusieurs températures et plusieurs voltages. Ces données sont issues de sondes de températures appelées PT100 et de débitmètres. Pour la deuxième partie principale, il nous était demandé de contrôler une résistance chauffante et notamment de la maintenir à une certaine température. Enfin, pendant toute la durée du projet nous avons été amenés à réaliser différentes tâches manuelles en plomberie et en électricité.
LabVIEW : un logiciel multitâches et très puissant
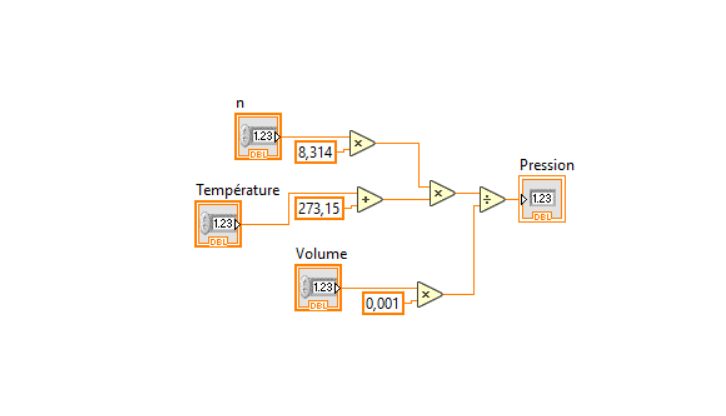
Afin de réaliser nos deux tâches principales, nous avons utilisé un logiciel de National Instruments nommé LabVIEW. Contrairement à d’autres langages de programmation comme le Python ou le langage C, la programmation sur LabVIEW s’effectue de manière beaucoup plus visuelle avec des blocs reliés entre eux.
On peut constater cela avec l’exemple suivant, illustrant la relation des gaz parfaits :
Programme LabVIEW illustrant la relation des gaz parfaits
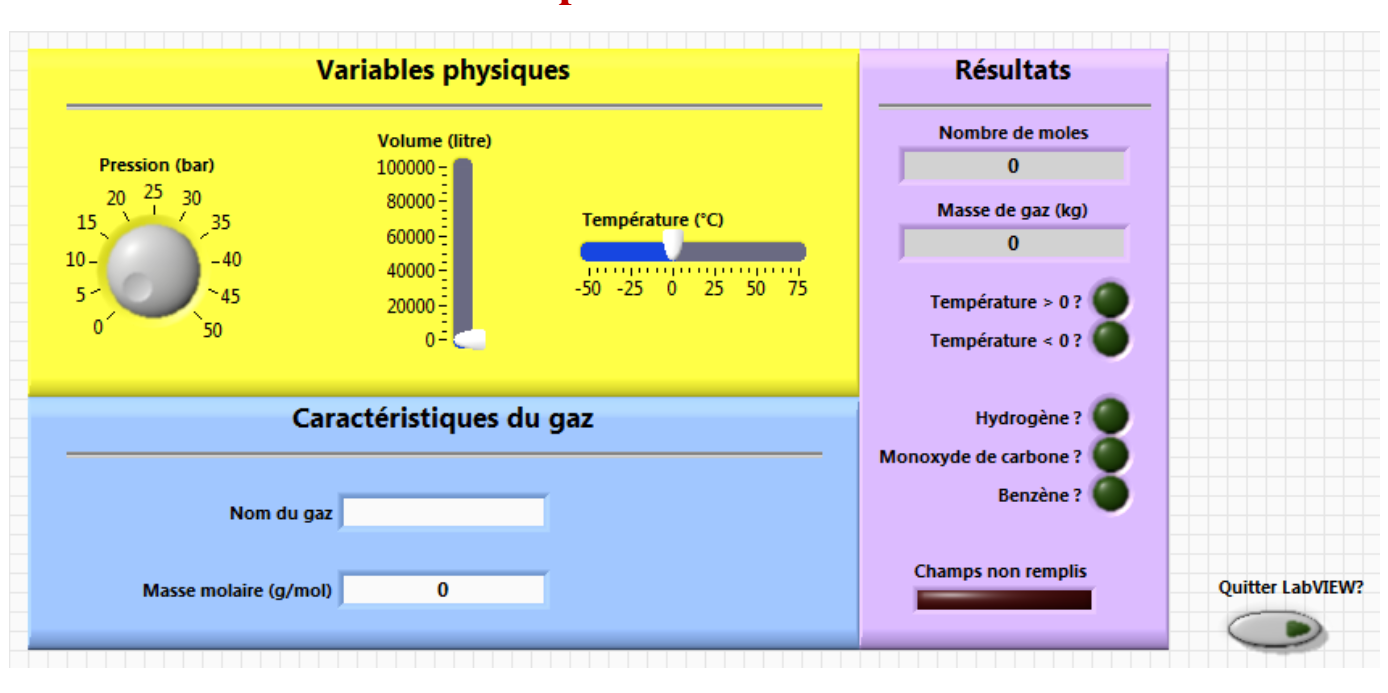
Un programme LabVIEW est constitué de deux parties avec le block diagram comme ci-dessus et le front panel comme ci-dessous.
Acquérir des données et les classer avec LabVIEW
Afin de récupérer les différentes données de notre banc d’essai, nous avons donc construit un programme LabVIEW.
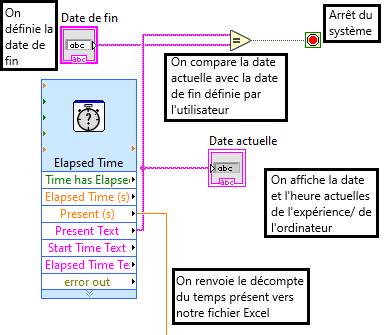
Pour commencer, nous avons réalisé une horloge permettant de définir la durée d’acquisition.
Programme LabVIEW permettant de donner une durée à l’acquisition
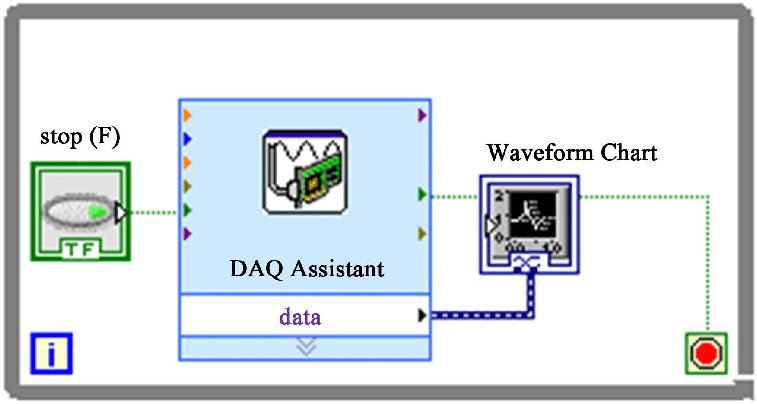
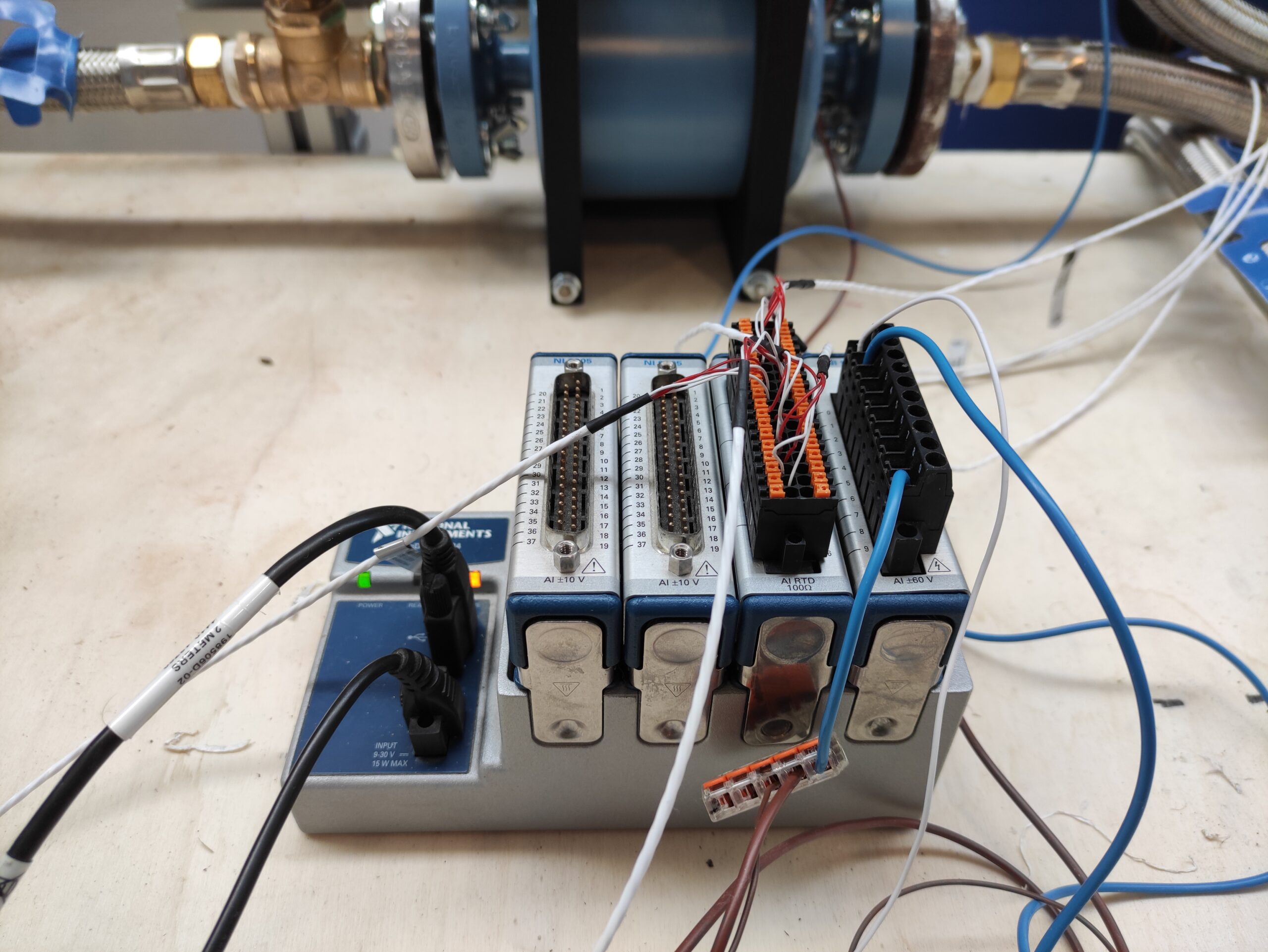
Ensuite, nous devions récupérer les données. Pour cela nous avons utilisé, sur le banc, des cartes d’acquisition liées aux différents capteurs de données et le module DAQ assisant sur LabVIEW.
Cela nous a permis de transférer les données du banc d’essai vers l’ordinateur.
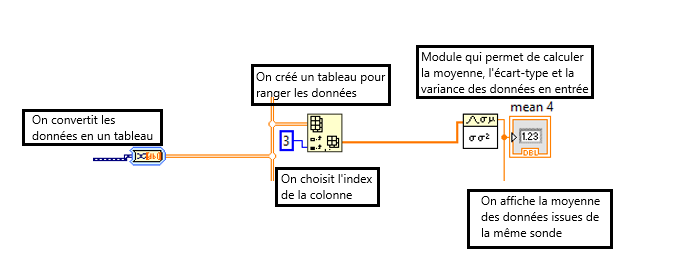
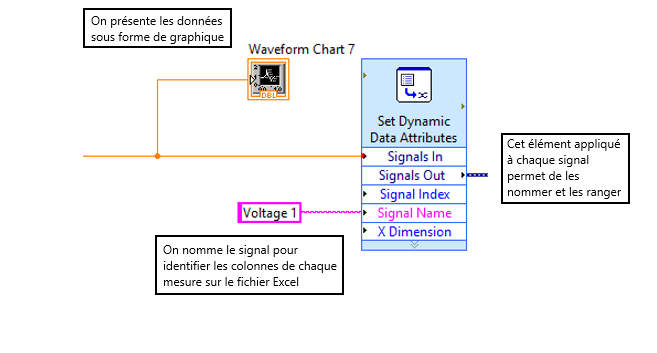
Après cela, nous devions convertir ces données en tableau pour les classer dans un fichier Excel. Pour cela, nous avons donc utilisé ces deux premières parties du programme général.
Ici on cherche à récupérer la moyenne des valeurs de chaque capteur pour avoir une seule valeur toutes les x secondes.
Cette partie du programme nous permet ici de créer une colonne de tableau pour chaque données avec un nom associé.
Les deux programmes ci-dessus sont donc répétés autant de fois que nous avons de capteurs, soit huit.
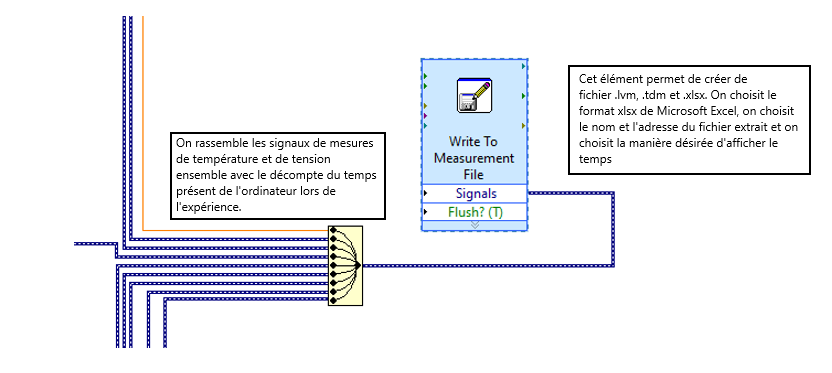
Enfin, nous avons relié ces sept parties du programme à un module nommé “Write to measurement file” pour créer le fichier Excel avec les données.
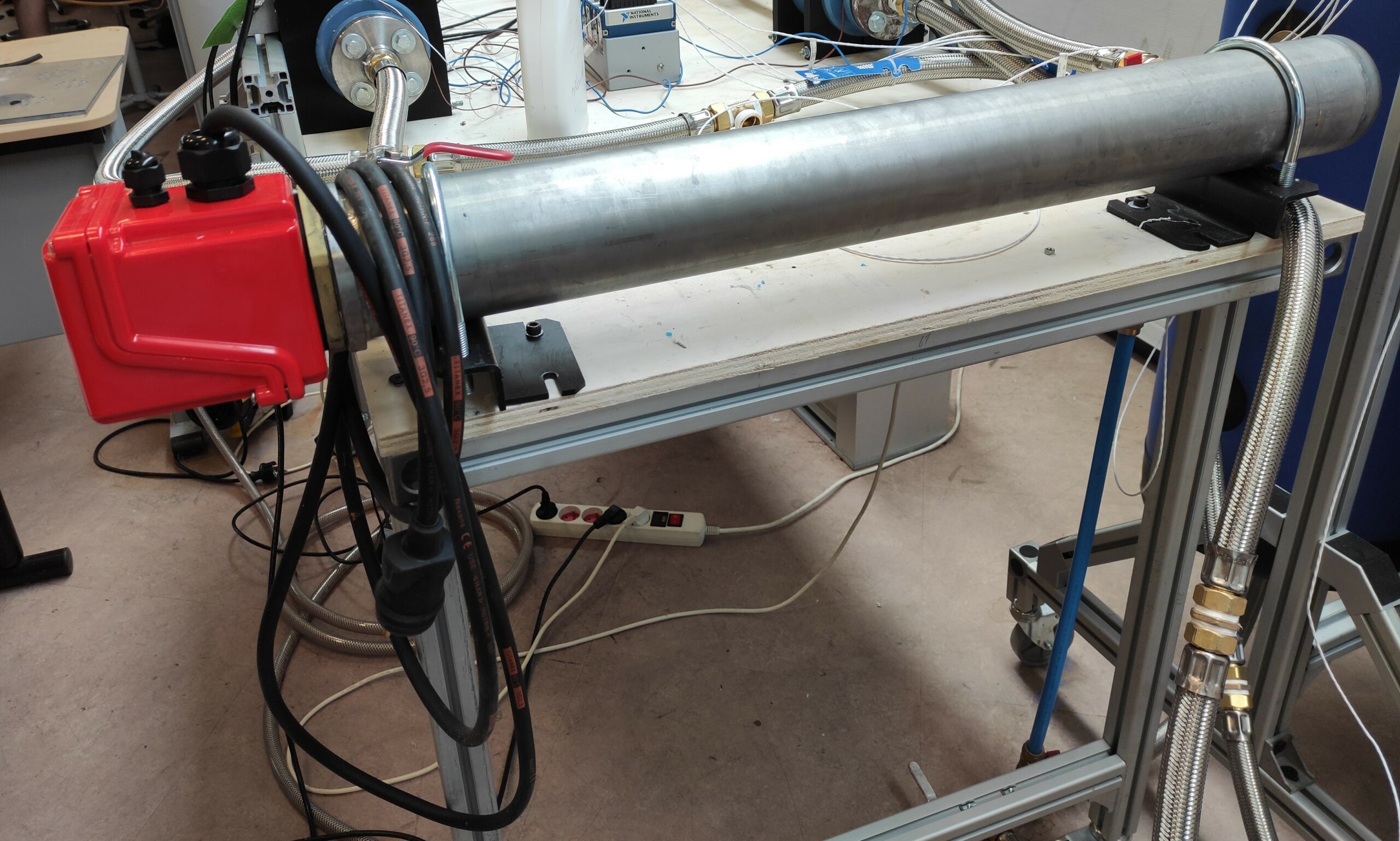
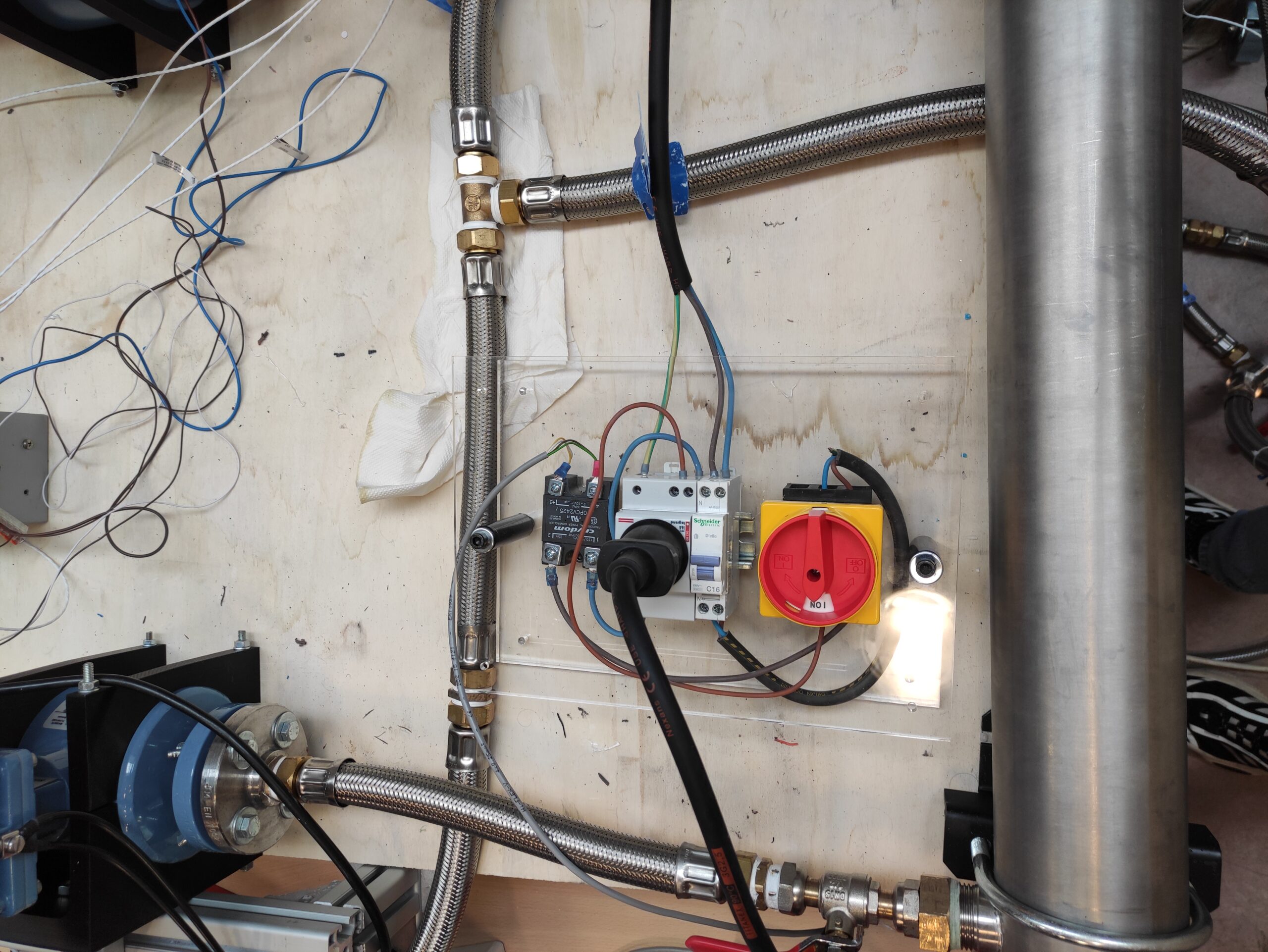
Pour cette partie, il nous était demandé de maintenir à une certaine température une résistance chauffante présente sur la banc d’essai. Cette résistance a pour but de chauffer l’eau en provenance de la pompe à chaleur.
Photo de la résistance chauffante
Pour contrôler cette température avec LabVIEW, nous avons utilisé le principe de la régulation. Pour illustrer ce qu’est la régulation, nous pouvons prendre l’exemple d’un régulateur de voiture. En effet, lorsque l’on souhaite que notre voiture roule à 110 km/h, l’ordinateur de bord va calculer la puissance que le moteur va devoir délivrer afin de maintenir la vitesse désirée selon la forme de la route par exemple.
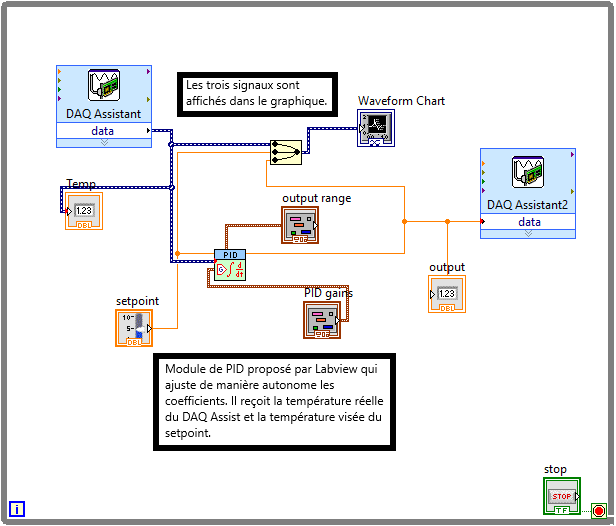
Pour en revenir à notre projet, nous avons conçu un programme LabVIEW utilisant le module de régulation PID ( Proportionnel Intégrale Dérivée) présent sur la version améliorée du logiciel.
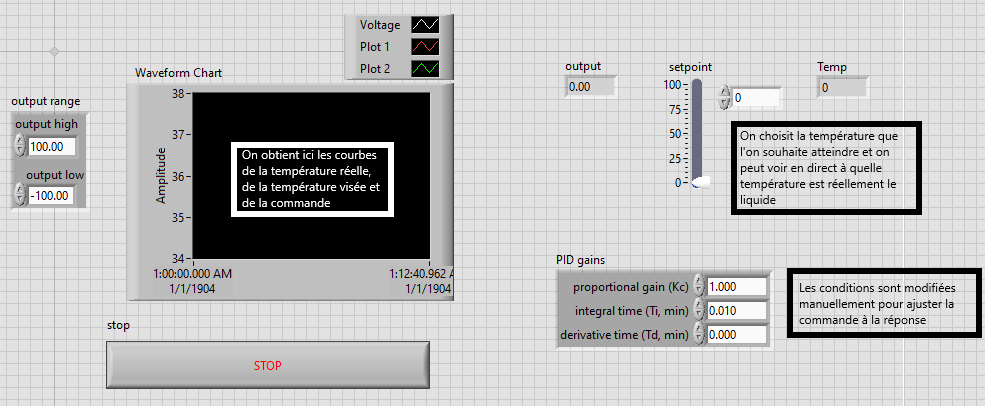
Grâce à ce programme, nous pouvons chauffer notre résistance à la température souhaitée et en optimisant les paramètres de PID, avoir une régulation des plus optimisées.
Front panel associé au programme précédent, permettant d’optimiser la régulation
De la plomberie et de l’électricité
Pendant toute la durée du projet nous avons été amenés à réaliser différentes tâches en plomberie et en électricité.
Pour la partie plomberie, nous avons pu changer de nombreux tuyaux, gérer des fuites et surtout éponger le sol !
En ce qui concerne la partie électricité, nous avons participé au branchement des cartes NI ainsi qu’à la réalisation d’un relais statique ou encore l’ajout d’un écran sur les débitmètres.
Quels apports pour nous ?
Ce projet a été pour nous l’occasion de développer de nombreuses compétences comme la gestion d’un projet avec les imprévus qui vont avec, l’achat de composants ou encore la pratique de l’anglais scientifique tout au long du projet.
Ce projet nous a aussi permis de visualiser une application directe de la thermique, de l’électricité ou encore de la mécanique des fluides.
Aux étudiants de première année à Polytech Angers, nous vous invitons à choisir un projet comme le notre car cela vous permettra d’effectuer de nombreuses tâches variées dans différents domaines
Nous sommes Maxence, Victor et Margot, trois étudiants en 2ème année du cycle préparatoire intégré de Polytech Angers. Notre projet consiste à concevoir et mettre en place un système de stationnement basé sur Arduino (une maquette d’un parking automatisé). C’est à dire que la barrière s’ouvre et se ferme toute seule quand elle détecte une voiture. Les contraintes sur ce projet étaient de programmer avec Arduino, que le système doive permettre la gestion de stationnement: nombre des places inoccupées qui doivent être affiché sur un écran, la durée de stationnement (en heure) et le prix de stationnement pour chaque voiture garée dans le parking.
Pourquoi avons nous choisie ce projet ?
Nous avons choisie ce projet car il permettait de toucher à tous les domaines : la conception, la programmation, la réalisation, l’impression 3D, etc. De plus, nous ne savions pas quelle spécialité choisir, donc travailler sur ce projet pouvait nous aider dans notre choix.
Étape de notre projet
Analyse fonctionnelle du système et de ses contraintes
Recherche de normes sur les vrais parkings
Recherche sur la maquette (pièces électroniques et planches)
Programmation sur Tinkercad
Devis
Fabrication pièces CAO
Construction maquette
Première phase: la recherche
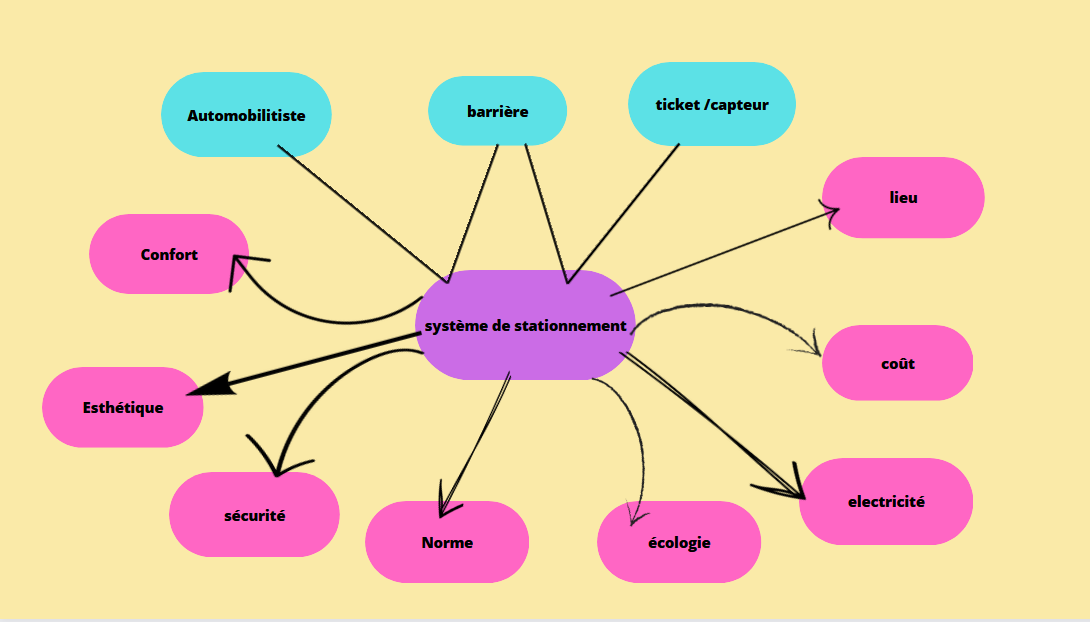
Nous avons commencé notre projet par une phase de recherche, nous avons mis en commun nos idées sur le meilleur parking et ce que nous voulions faire. Tout d’abord nous avons fait un schéma fonctionnel pieuvre, que vous pouvez retrouver ci dessous. Grâce a cela nous avons eu une vision des contraintes : l’écologie, le prix, l’esthétique, etc.
schéma pieuvre
Ensuite nous avons fait un peu de recherche sur la construction d’un vrai parking, afin de respecter au mieux les normes est les dimensions.
La réflexion sur notre maquette
Après ces recherches, nous avons choisi à quoi notre maquette de parking allait ressembler. Nous voulions que le parking ait un étage, deux places handicapées ainsi que deux places électriques. Il y aura 23 places classiques avec une entrée et sortie différente. Les places libres seront indiqué grâce à deux écrans.
Nous avons fait plusieurs devis et commandes d’électronique et de bois pour la structure du parking.
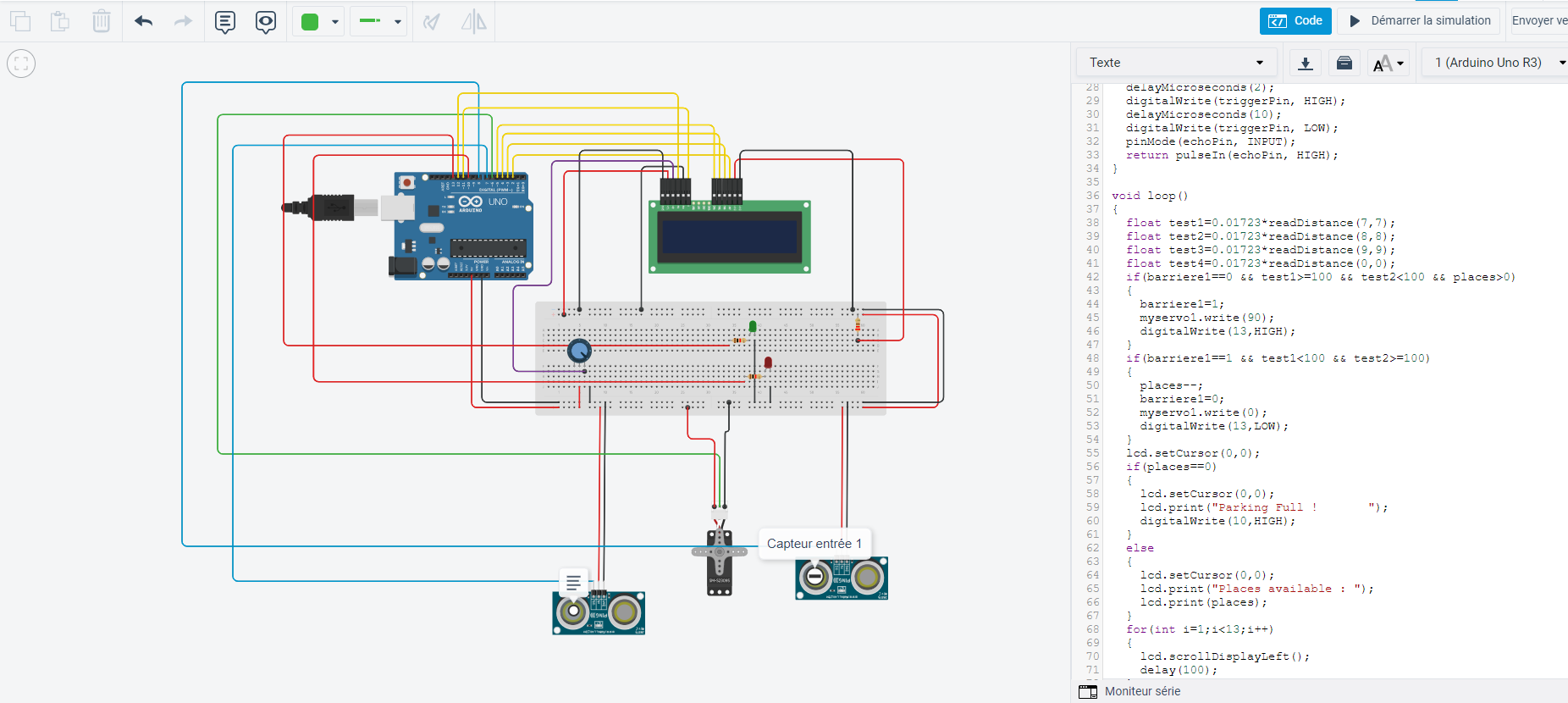
Programmation sur Arduino
Au début nous avons utilisé le logiciel TINKERCAD avons d’avoir les composant. Ce logiciel est un simulateur Arduino avec les composant et la partie programmation. Cela nous a permis de commencé la programmation.
Ensuite nous avons programmé sur Arduino par l’intermédiaire d’une carte Arduino méga.
Conception support 3D
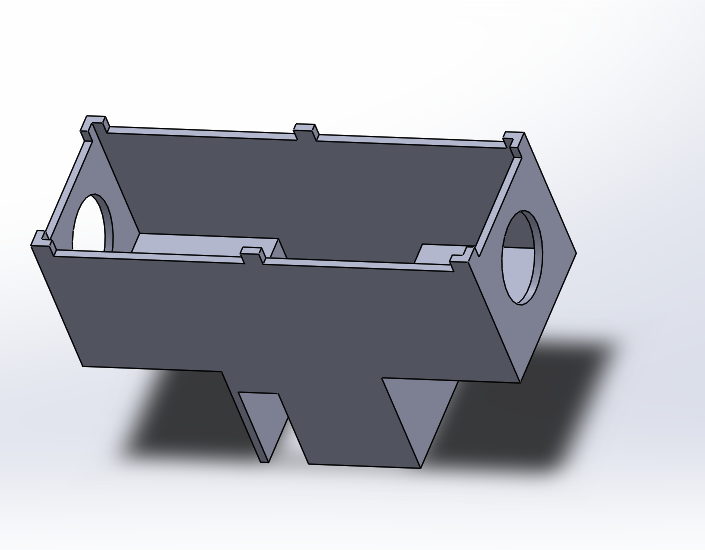
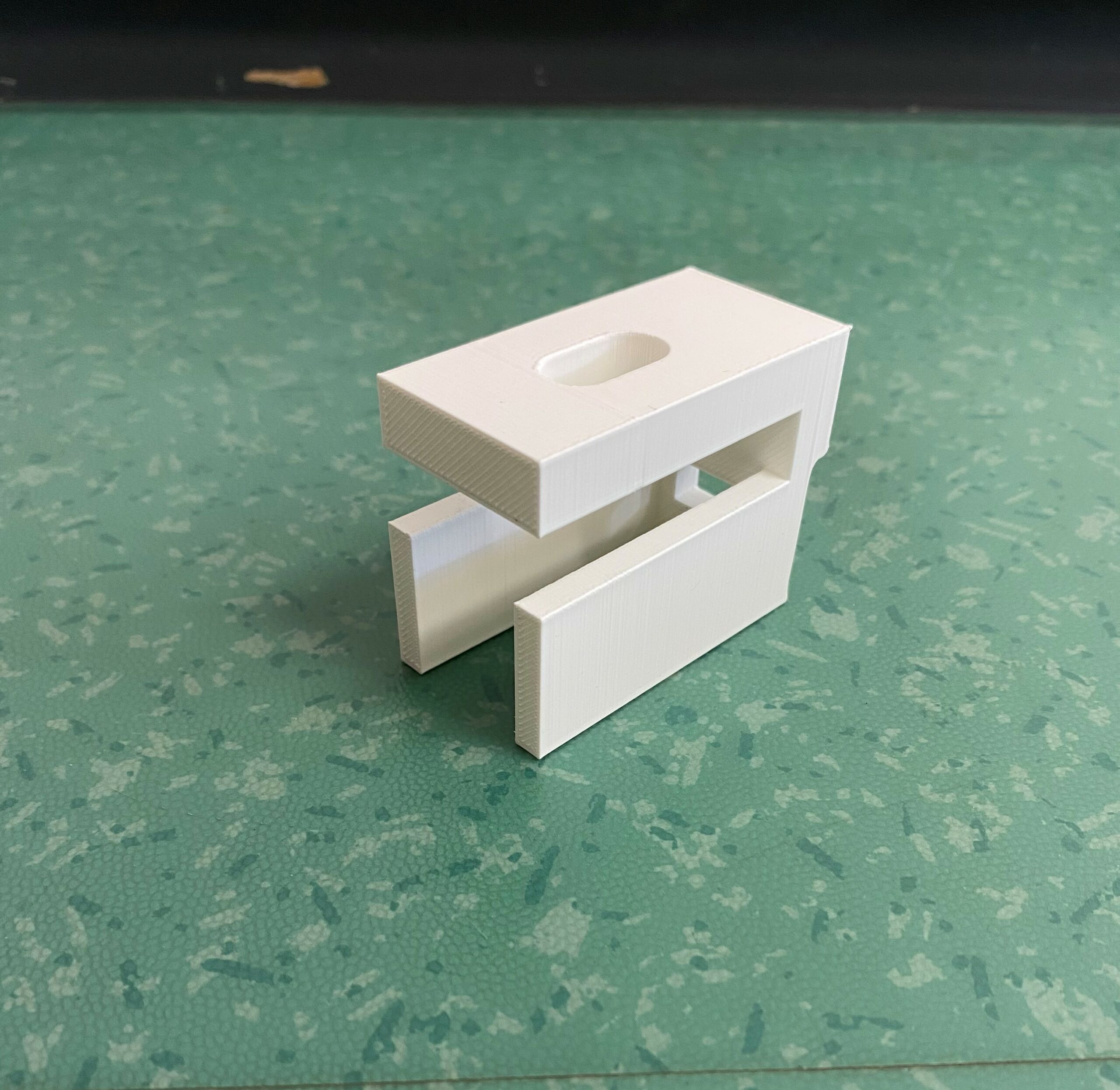
Nous avons principalement utilisé le logiciel SOLIDWORKS, c’est un logiciel de CAO très utilisé à Polytech. Nous y avons construit tout nos panneaux de signalisation ainsi que la barrière et un boitier pour couvrir les câbles et y mettre l’entrée et la sortie. Le point positif avec l’impression 3D est que l’on pouvait vraiment créer les pièces que nous voulions avec les mesures désirées.
le boitier d’entrée/sortie
Conception de la maquette
Une fois toutes nos planches reçues, nous avons commencé la construction de la maquette.
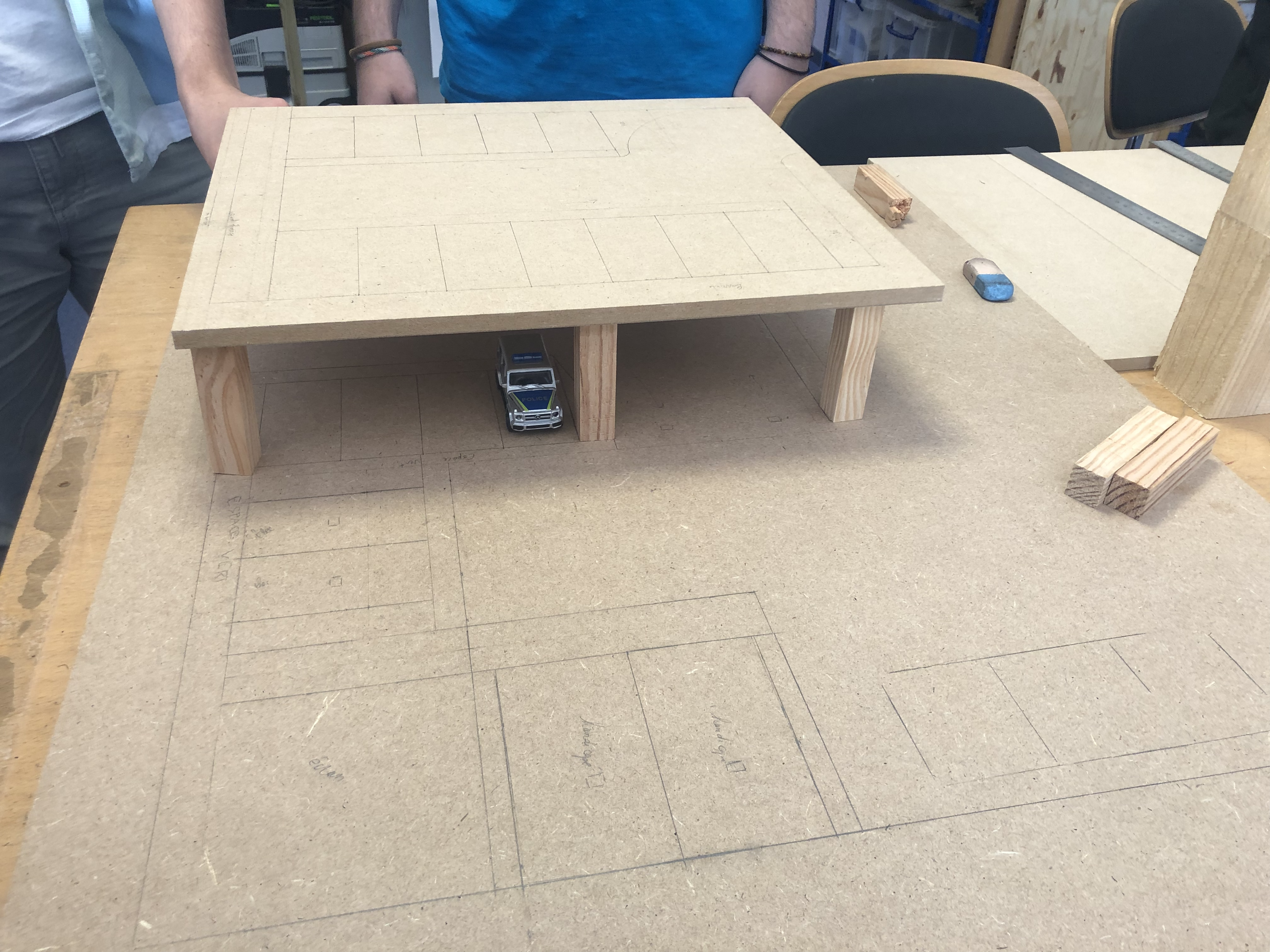
La première étape était de tracer toutes les places et passages sur les planches au crayon de bois. Cela nous a permis de voir comment rendait le parking et de faire quelque changement comme agrandir l’espace pour les barrières. Nous avons fait cela sur les deux planches.
première image de la maquette
Ensuite nous avons dimensionné et coupé les poteaux permettant de surélever le parking et de créer l’étage.
Après nous avons installé les capteurs et écrans (toutes l’électronique). Nous avons décidé de faire passer tous les fils sous la maquette pour que le rendu soit plus propre. Donc il a fallu faire plusieurs trous pour faire passer les capteurs.
En parallèle, nous avons imprimé les panneaux 3D ainsi que les barrières de protection et les barrières d’ouverture. Nous avons aussi créé des cartes de différentes couleurs avec des planches de bois et des stickers que nous avons conçu. Ces cartes vont permettre d’être reconnues par les capteurs couleur à l’entrée et à la sortie du parking, cela permet de simuler les cartes d’abonnement d’un parking réel.
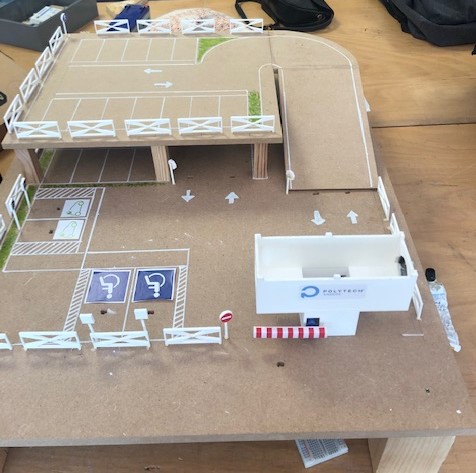
Pour finir, nous avons tout fixer : les piliers sur l’étage, panneaux, barrière et toute la partie électronique, ainsi que repasser au crayon Posca tous les marquages. Notre maquette est prête ! Maintenant c’est le moment de tester. Nous vous avons mis ci-dessous une vidéo du fonctionnement complète de la maquette.
Cobot Universal Robots, série UR3E: dispositif pour tester le suivi de trajectoires
Connaissez vous le jeu du fil chaud ?? Ce jeu est simple, le but est de suivre la trajectoire d’un fil électrifié. La petite difficulté réside dans le fait que pour contrôler le bon suivi, vous avez une boucle autour du fil, et si la boucle touche le fil, vous prenez une petite décharge électrique. Le fond du jeu est donc un problème simple, c’est un contrôle de suivi de trajectoire, réalisé ici dans ce cas par vous même. Mais nous pouvons imaginer le même jeu pour un bras Robot, notre projet se rapproche donc beaucoup de ce jeu. Le cahier des charges initiale est presque aussi simple que le jeu. Nous disposons d’un bras robot, et nous devons contrôler le bon suivi de la trajectoire définie.
Reflexion
Grace à plusieurs méthodes telles que le Diagramme bête à cornes ou le Diagramme pieuvre nous réalisons les objectifs principaux de ce projet qui sont: concevoir un support pour le fil, concevoir un système de détection de collision, programmer le bras robot. Nous passons donc par plusieurs réflexions et posons les idées principales retenues pour chacun de ces objectifs. A noter que sont présentées ici seulement les versions finales de chaque réflexions, nous sommes passé par plusieurs versions test afin d’arriver à cette versions du projet.
Conception
Support de fil
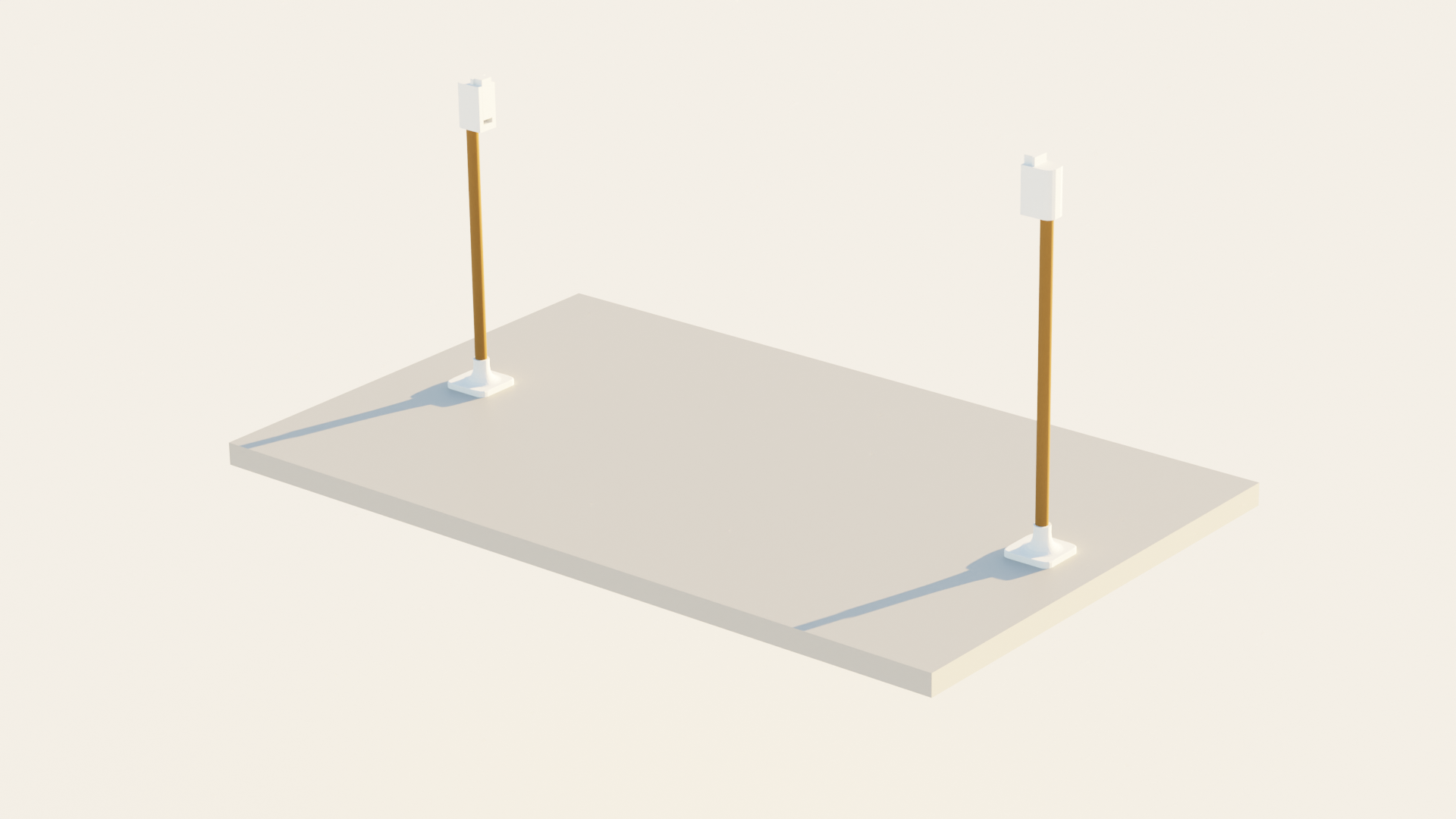
Pour commencer nous avons conçu un support pour le fil, nous avons donc choisi une planche assez grande pour permettre des trajectoires assez grandes, ainsi que assez épaisse pour pouvoir y fixer les poteaux ainsi que pour garantir la solidité du système.
Nous avons donc une planche avec des poteaux en bois, et pour fixer les poteaux en bois nous avons modélisé et imprimé des pièces en 3D que nous avons fixé de chaque coté de la planche. Puis nous avons également modélisé et imprimé des pièces que nous fixons en haut des poteaux pour y accrocher le fil. Le but du système est de pouvoir changer la trajectoire à contrôler, nous avons donc mis en place un système de fixation pour le bout du fil, nous pouvons changer le fil utilisé pour changer le parcours, que l’on appellera niveau (ligne droite, courbe …)
Fixation des poteauxFixation interchangeable de fil
Le plateau est donc prêt à accueillir le fil, qui n’est pas négligeable ici, il doit être assez rigide pour ne pas être déformé lors du changement de niveau ou du transport du système. Il doit également être conducteur pour la suite du projet. Nous avons donc choisi un fil de cuivre, que nous pouvons modifier à notre guise à la main.
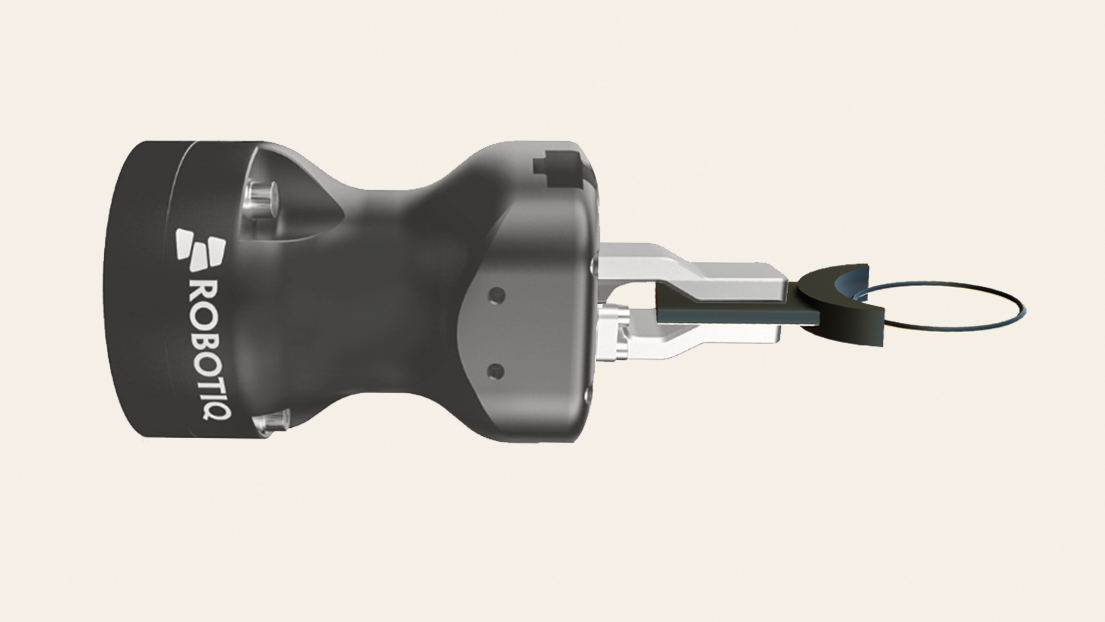
Support de boucle
La partie fixe est maintenant prête, nous avons maintenant la partie mobile à concevoir, elle se compose du bras robot, rien à créer ou construire ici mais nous devons fixer au bout du bras une boucle. C’est cette boucle qui va contrôler le suivi de trajectoire, nous devons donc concevoir un outil qui nous permettra de la fixer. Avec le robot nous était également fourni une pince de chez Universal Robot, un outil que nous pouvons installer au bout du bras robot. Cet outil peut être ouvert ou fermé à notre guise, nous avons donc décidé d’utiliser cet outil pour y fixer une pièce imprimée en 3D où sera fixée la boucle en métal.
Pièce et fil de métalPièce dans la pince
Systeme de détection
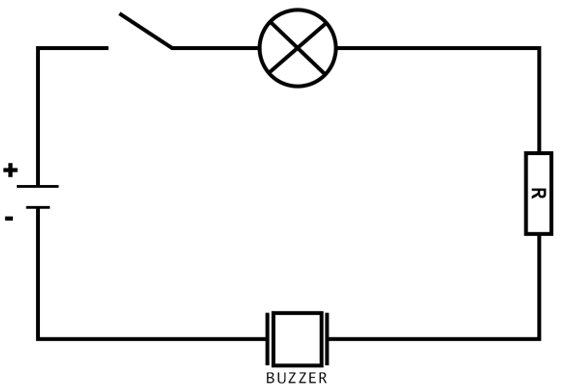
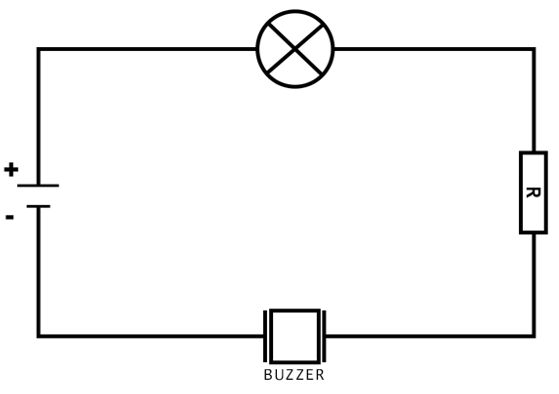
Le système est maintenant prêt à fonctionner, mais nous n’avons pas encore de système de détection de contact. La solution la plus simple à nos yeux est un contrôle de continuité d’électricité. Le principe est simple, nous avons une partie du système (le fil ici) qui est connectée à une alimentation (le + d’un générateur). L’autre partie (la boucle au bout du bras) est quant à elle connectée à une masse (côté – du générateur), ainsi si le contact est établi entre la boucle et le fil, il va y avoir continuité dans le circuit et donc un courant va traverser le circuit. Nous n’avons plus qu’à rajouter une led ou un buzzer sur le circuit afin d’avoir un signal lumineux ou sonore lors du contact. Notre circuit est schématisé ici:
Circuit quand il n’ya pas contactCircuit lors d’un contact
Programmation
La dernière étape est de programmer le robot afin de réaliser les différentes trajectoires définies. Nous avons en effet conçu plusieurs trajectoires différentes afin de rendre le projet plus complet. Pour la partie programmation, nous avons plusieurs options: nous pouvons programmer en locale sur la tablette de contrôle du robot (langage se rapprochant de Scratch avec des blocs de fonctions à mettre les uns à la suite des autres), en réseaux en python. La manière la plus intuitive est pour nous de programmer directement en local, cela nous permet de tester plus rapidement chaque modification apportée. Pour notre projet la partie programmation a été assez facile, nous n’avons besoin que de quelques fonctions de base telles que les déplacements de l’outil ou l’ouverture et fermeture de l’outil. Le principe est simple, nous devons définir des points de passage, points où lesquels l’outil du robot dois passer durant le mouvement. La partie compliquée est plutôt le type de déplacement à utiliser. Plusieurs modes de déplacement nous sont proposés mais dans notre cas nous avons besoin que le mouvement de l’outil soit linéaire. D’autres modes sont proposés tels qu’un mode de lissage articulaire, ce mode demande aux articulations du robot de finir leur mouvement en même temps, ce qui donne des mouvements saccadés et en aucun cas linéaires. Nous programmons donc les mouvements du robot grâce aux points clés pour chaque niveau.
Et voila !!
Nous n’avons plus qu’a mettre en place le niveau qui nous intéresse et à lancer le programme adapté.
Pour aller plus loin
Plusieurs améliorations sont possible, telle que la mise en place d’un repère relatif. En effet nous avons un problème de taille avec ce système, les points clés des programmes sont définis dans les coordonnées du repère du robot, donc dès que nous bougeons la planche du support du fil, tous les points clés sont faussés, ils ne correspondent plus à la trajectoire recherchée. Pour palier à ce problème, nous avons mis en place un repère relatif lié à la planche, où nous plaçons les points clés de chaque niveau. Nous pouvons donc maintenant bouger la planche, cela demande juste de redéfinir le repère à chaque changement.
Pour conclure
Ce projet nous a demandé beaucoup de réflexion, pour arriver à une version finale nous avons du effectuer beaucoup de test mais grâce à cela, la version finale telle qu’elle est actuellement est entièrement fonctionnelle et répond en tout points aux demandes du cahier des charges. Cela nous a permis de mettre un pied dans une variété de domaines comme la programmation, l’électricité ou le bricolage et nous conforté dans nos choix de spécialités.
Venez à la découverte notre projet engagé et polyvalent, où nous explorons et concevons l’arrosage intelligent et écologique !
Le projet d’arrosage automatique pour le jardin partagé de l’Université d’Angers à La Passerelleprésente de nombreux avantages. Il répond à notre volonté de promouvoir l’éthique environnementale tout en nous offrant une opportunité d’apprentissage diversifiée.
La proposition du projet était déjà pluridisciplinaire et ambitieuse dès le départ. L’objectif principal du projet est de collecter l’eau de pluie et de gérer l’arrosage de manière automatique et écologique.
Le défi de parvenir à l’autosuffisance énergétique et hydraulique pour maintenir l’écolabel du jardin de Belle-Beille nous a particulièrement motivés. Nous considérons cela comme un véritable stimulant pour notre engagement dans ce projet.
Découvrez comment économiser l’eau tout en maintenant un jardin verdoyant grâce à nos astuces et idées novatrices !
La conception de notre système en réponse à différentes problématiques
Aspect hydraulique et constructions
La sécheresse de 2022 couplée au manque de personnel de l’université d’Angers ont eu un impact important sur le jardin partagé. Le manque d’eau, les restrictions imposées sur son utilisation ont rendu difficile l’entretien des plantes, réduit les récoltes et la qualité des aliments produits, et a compromis la viabilité à long terme du jardins partagés. Ainsi, le projet d’arrosage automatique a été lancé dans le but de permettre au jardin de s’épanouir même lorsque l’année scolaire est terminée.
En raison de la superficie de notre jardin (environ 30m2) et la pluviométrie à Angers, nous avons jugé judicieux d’avoir un stockage de 640L d’eau de pluie (elle même récupérée via une surface de 15m2 par une chaine à écoulement de pluie). Nous avons ainsi installé deux stock d’eau : 1 premier de 4 bidons de 30L et un second d’une grande cuve de 500L.
Ces deux stocks seront reliés par un tuyau enterré faisant passer, grâce à une pompe, l’eau récupérée dans les bidons bleus vers la grande cuve. Ensuite, l’arrosage se fera de la grande cuve au jardin avec une goutte via un système de goutte à goutte acheté à LeRoyMerlin. Un tel arrosage permettant à la fois des économies d’eau considérables et un meilleur entretien des plantes.
Aspect électronique, électrique et programmation
Afin d’automatiser notre système, nous nous sommes penchés sur différents points :
la volonté que notre arrosage soit modulable par les utilisateurs du jardin.
une gestion des pompes visant à ne jamais la faire fonctionner à vide
l’autonomie électrique du panneau solaire étant limité, nous devions envisager une automatisation peut énergivore.
la possibilité d’être avertis via le site web si notre stock d’eau doit être rempli manuellement (via capteurs niveau haut/bas
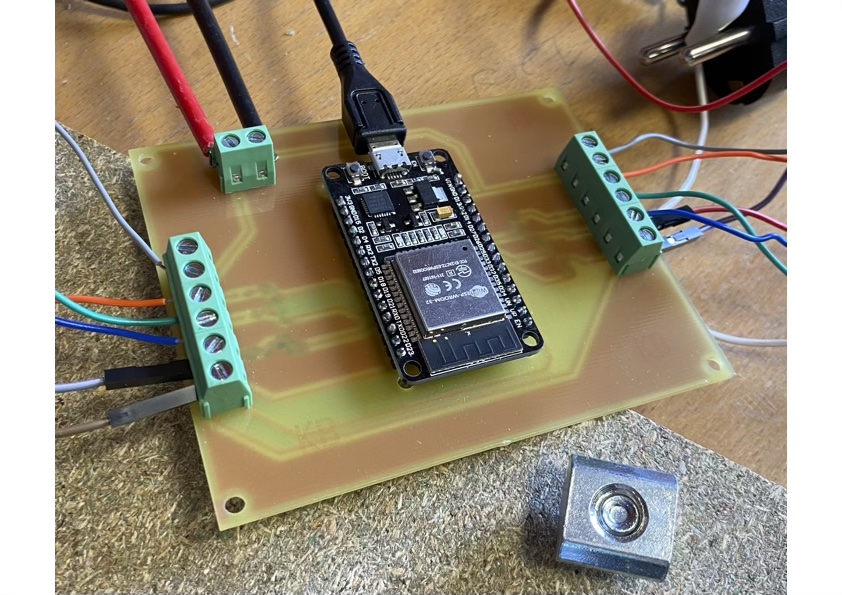
Ces réflexions nous ont amené Mr Godon à la création de cartes électroniques connectées au réseau wifi en JSON afin de moduler à distance l’arrosage. L’ESP32 est donc très adaptée pour cette utilisation, elle permet d’interroger les consignes données depuis notre site web ouvert aux étudiants en JSON.
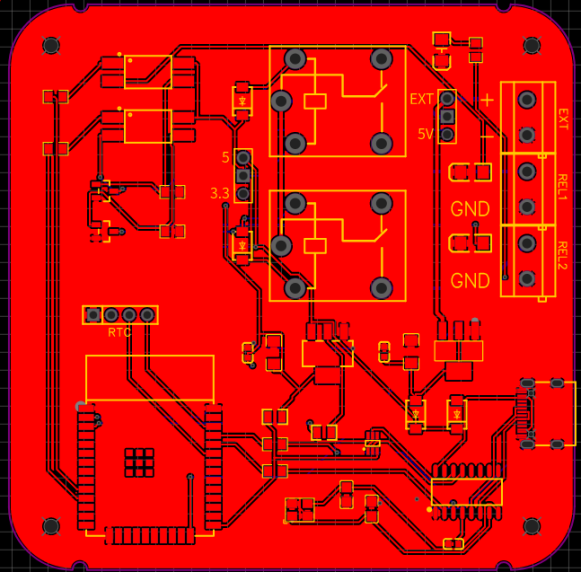
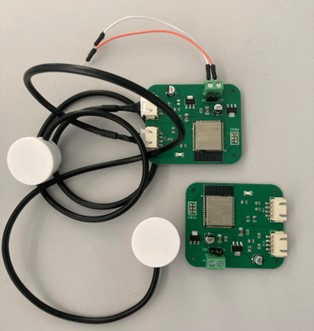
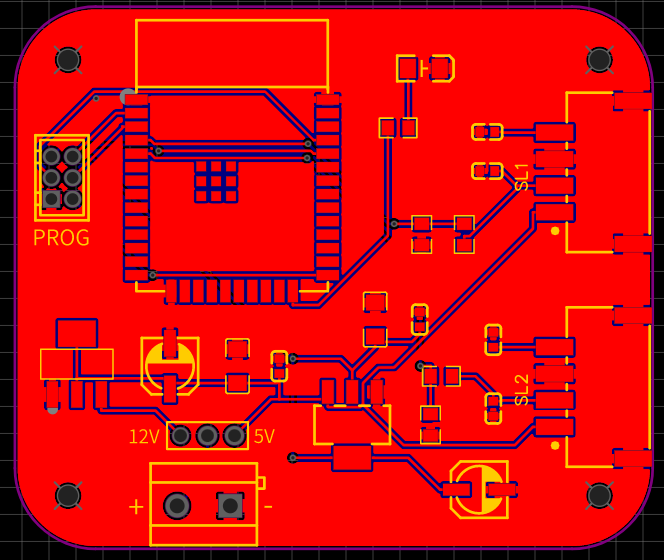
Voici nos différentes cartes électroniques :
Dans le cas de notre système d’arrosage automatique, la carte électronique “master” est responsable de la gestion de l’ensemble du système d’arrosage, incluant la communication avec les autres cartes électroniques pour la gestion de l’arrosage en fonction de la quantité d’eau présente dans les cuves
Master
Nous avons deux cartes dites « slaves » car dépendantes du Master. Elles ont pour objectif d’analyser les quantités d’eau présentes dans nos différentes cuves avec différents capteurs pour la grande cuve et les bidons bleus.
Slaves
Ces 3 cartes électroniques sont alimentées par un panneau solaire 12V placé au dessus du préau de la passerelle ainsi que d’une batterie. Pour des raisons de sécurité, nous l’avons installer sur un boitier étanche afin d’y mettre la batterie et les autres équipements électroniques, eux mêmes reliés par câblage aux pompes 1 et 2.
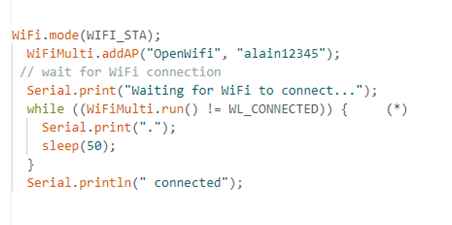
Voici un extrait de nos codes informatiques, celui-ci permet, par exemple, à la carte ESP32 de se connecter au Wifi :
Afin de gérer l’arrosage, voici l’interface du site internet que nous avons créer, lui même connecté en JSON. Ce site est accessible via les QR codes présents dans le jardin. Voici une capture vidéo des usages pouvant être fait du site :
N’ayant pas eu le temps d’installer le projet fini avant la date limite de rendu du rapport, il nous reste seulement à connecter les différents câblages et cartes électroniques. Leur fonctionnement a déjà été testé à Polytech !
Nous laisserons libre recours à notre arrosage aux utilisateurs du potager et espérons qu’il sera efficace et utile !
Le développement technologique a ouvert de nouvelles perspectives passionnantes pour la représentation virtuelle des environnements réels. Dans le cadre du projet “Polytech en 3D”, encadré par Thierry Capelle, nous avons entrepris de créer une application de visite virtuelle de notre école Polytech Angers.
Dans cet article, nous résumerons notre démarche, les défis auxquels nous avons été confrontés et les solutions que nous avons apportées pour offrir une expérience immersive unique.
L’objectif principal de notre projet était de permettre aux utilisateurs de se déplacer librement à l’intérieur et à l’extérieur du bâtiment en utilisant des photos à 360 degrés.
Nous voulions offrir une expérience immersive qui permettrait aux utilisateurs de se sentir comme s’ils étaient réellement présents sur le campus. Pour cela, nous avons utilisé une banque de données de photos à 360 degrés prises à Polytech avec une caméra 360 degrés et le logiciel Unity3D, complété par les fonctionnalités supplémentaires de Vour360.
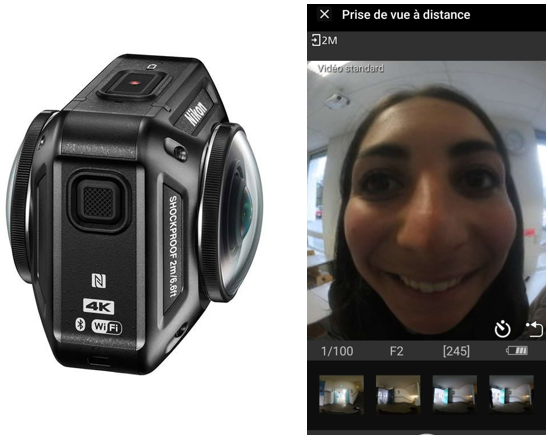
Pour commencer, nous avons dû nous familiariser avec les outils et les exigences du projet. Notre encadrant, Thierry Capelle, nous a présenté le logiciel Unity3D et la caméra 360 degrés de Nikon, la KeyMission 360. Nous avons récupéré les plans de Polytech Angers et avons déterminé les emplacements stratégiques pour prendre les photos à 360 degrés.
La prise de photos a été une étape cruciale de notre projet. Nous avons utilisé l’application SnapBridge 360/170 pour contrôler la caméra à distance à partir de nos téléphones.
Photo en 360 de l’amphi A
Cela nous a permis de prendre des photos sans apparaître dans le cadre. Nous avons dû faire preuve de créativité pour prendre des photos dans toutes les pièces accessibles tout en tenant compte de l’éclairage et de l’orientation pour faciliter le montage de la constellation.
Nous avons décidé de créer fichier Excel pour répertorier et organiser les photos, en associant des numéros et des noms à chaque emplacement, des commentaires ont été ajoutés à chaque case pour afficher les photos correspondantes. Les plans de chaque étage ont été inclus dans le fichier Excel pour faciliter l’organisation et la création de la visite virtuelle.
Plan réalisé sur Excel à l’aide des plans de l’école, afin de relier les images entre-elles
Image s’affichant lorsque l’on passe la souris sur une case
L’utilisation du logiciel Unity3D a été un défi majeur pour notre équipe, mais après avoir étudié des exemples existants et compris les fonctionnalités de Vour360, nous avons réussi à le prendre en main pour commencer ce qui sera notre projet final :
Aperçu du logiciel Unity3D
Les photos prises ont été intégrées dans Unity3D, et des capteurs ont été utilisés pour permettre aux utilisateurs de se déplacer d’une photo à une autre.
Les liens entre les photos ont été créés en se référant au fichier Excel, ce qui a permis de guider les visiteurs à travers le campus virtuel.
Malgré les défis rencontrés, tels que la prise en main d’Unity3D et la coordination des tâches, notre équipe a réussi à mener à bien le projet.
Notre application de visite virtuelle permettra aux utilisateurs de découvrir Polytech Angers de manière immersive, que ce soit lors des journées portes ouvertes, pour l’accès des pompiers en cas d’urgence ou simplement pour explorer le bâtiment depuis un appareil.
Rendu de la visite virtuelle lorsque nous sommes dans le hall d’entrée
Découvrez notre projet sensationnel !
Projet réalisé par Ouy-Barles Moïse, Emery Clarisse, Burgevin Mathis et Boubakar Nolwenn
Bienvenue sur cet article qui parle de notre projet, 100 heures dédiées à ce projet, 100 heures de réflexion, d’enthousiasme, de discorde mais surtout 100 heures d’un travail collectif abouti. L’idée de commencer ce projet nous excitait beaucoup et les premières discussions avec notre professeur encadrant : Monsieur BOIMOND, nous ont directement mis dans le bain et nous avions hâte de commencer. Notre professeur encadrant nous a directement donné sa confiance en nous prêtant un robot Dobot Magician.
Attendez !!
On vous parle de notre robot mais dans l’euphorie on ne vous a pas encore présenté notre objectif.
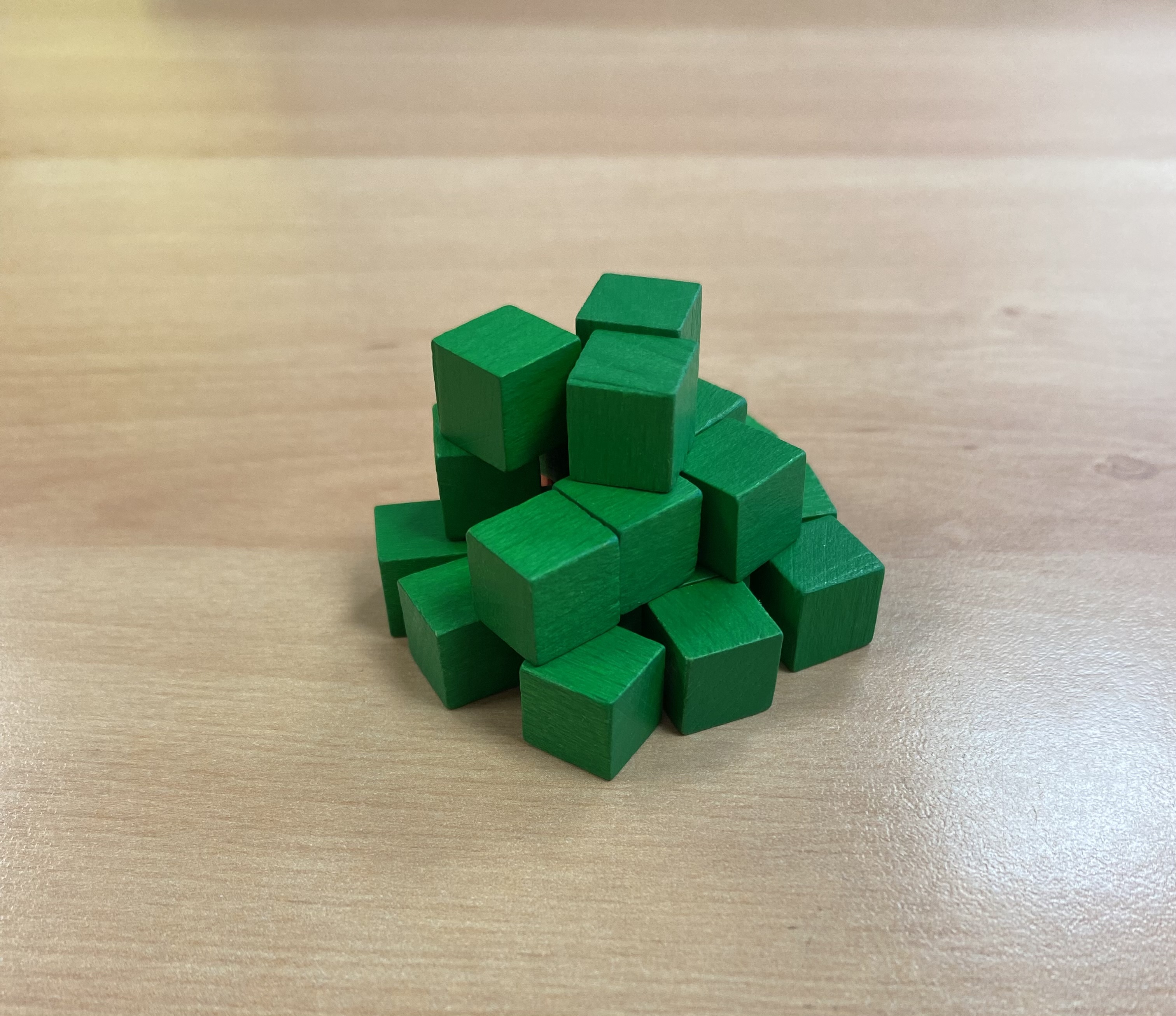
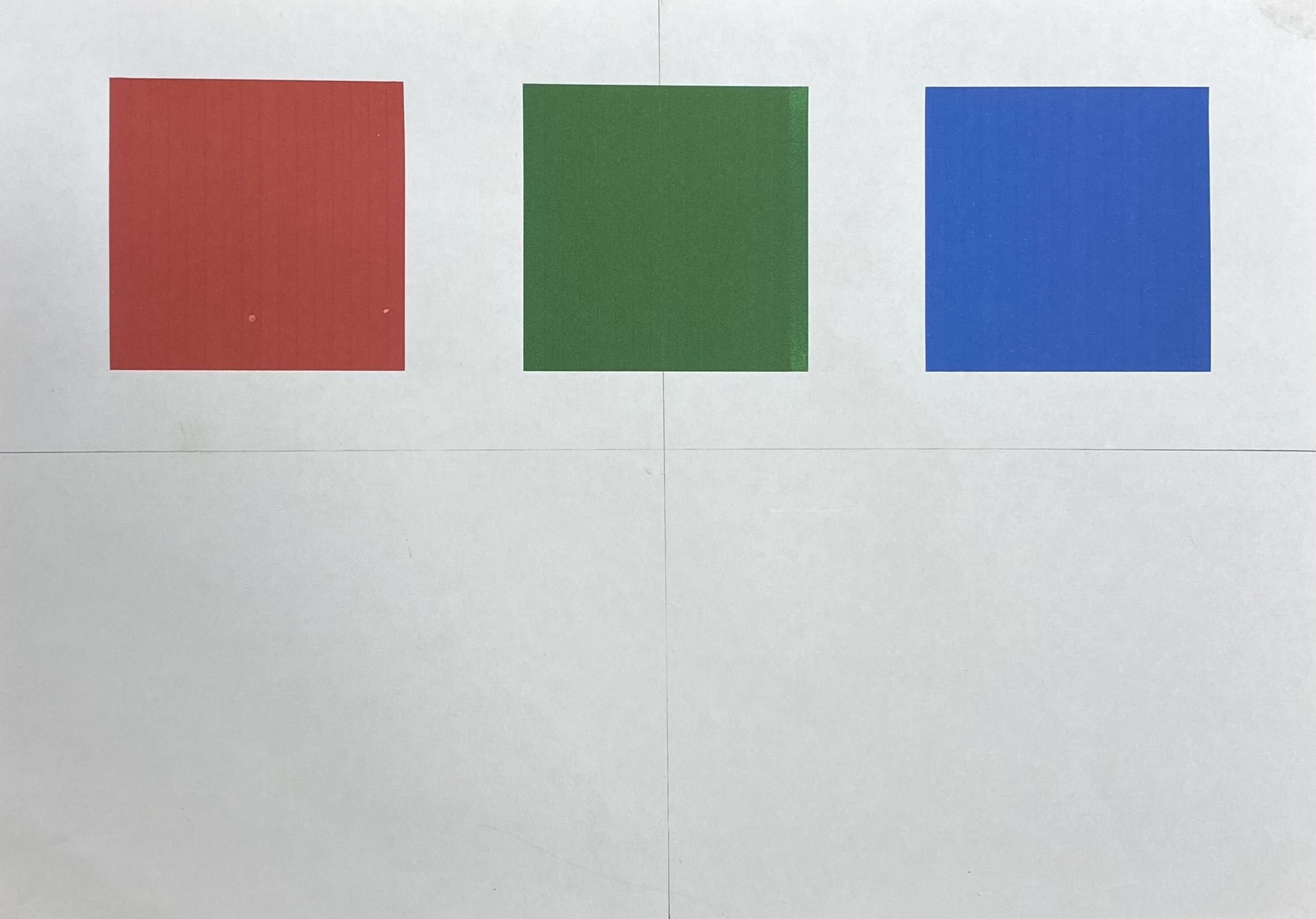
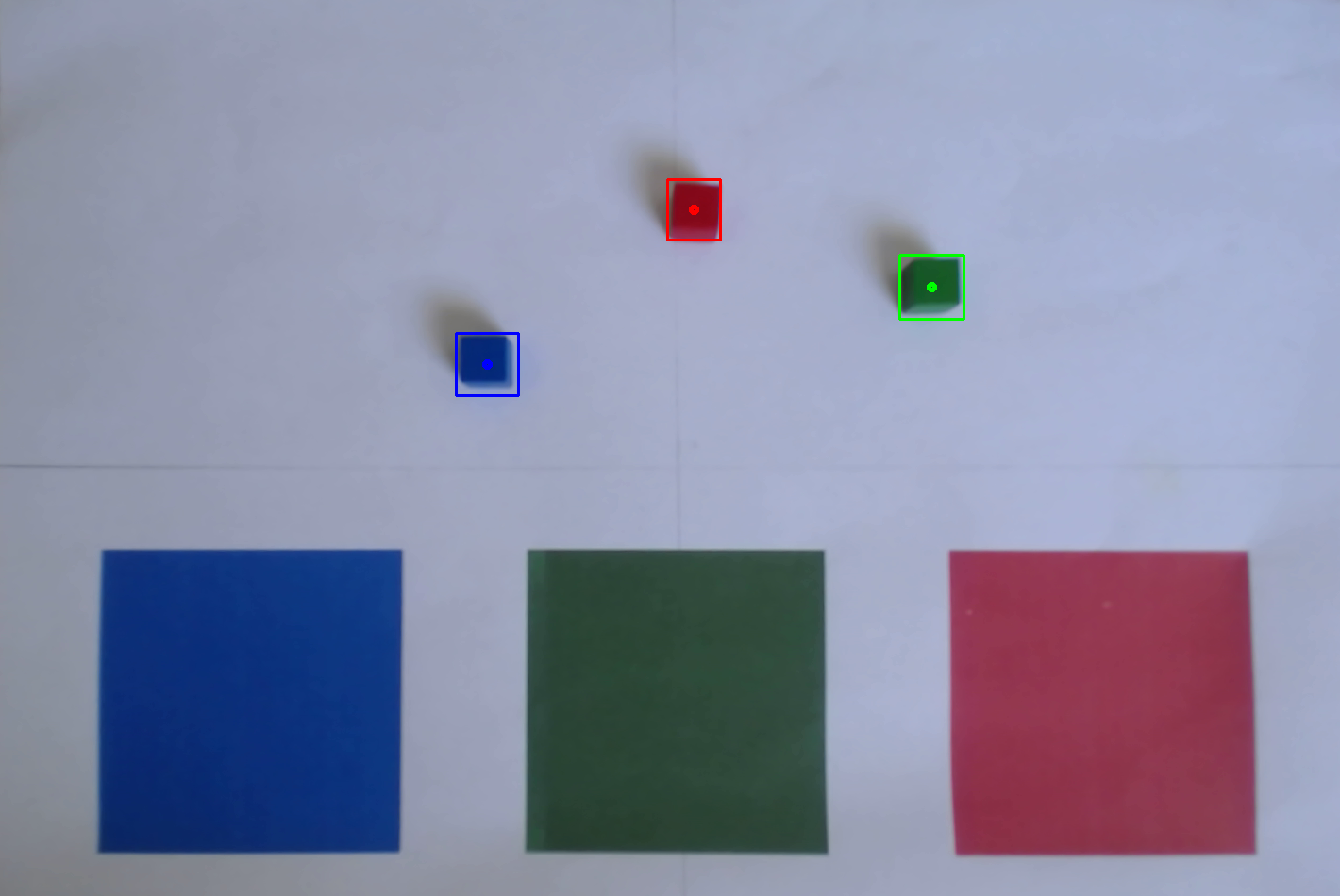
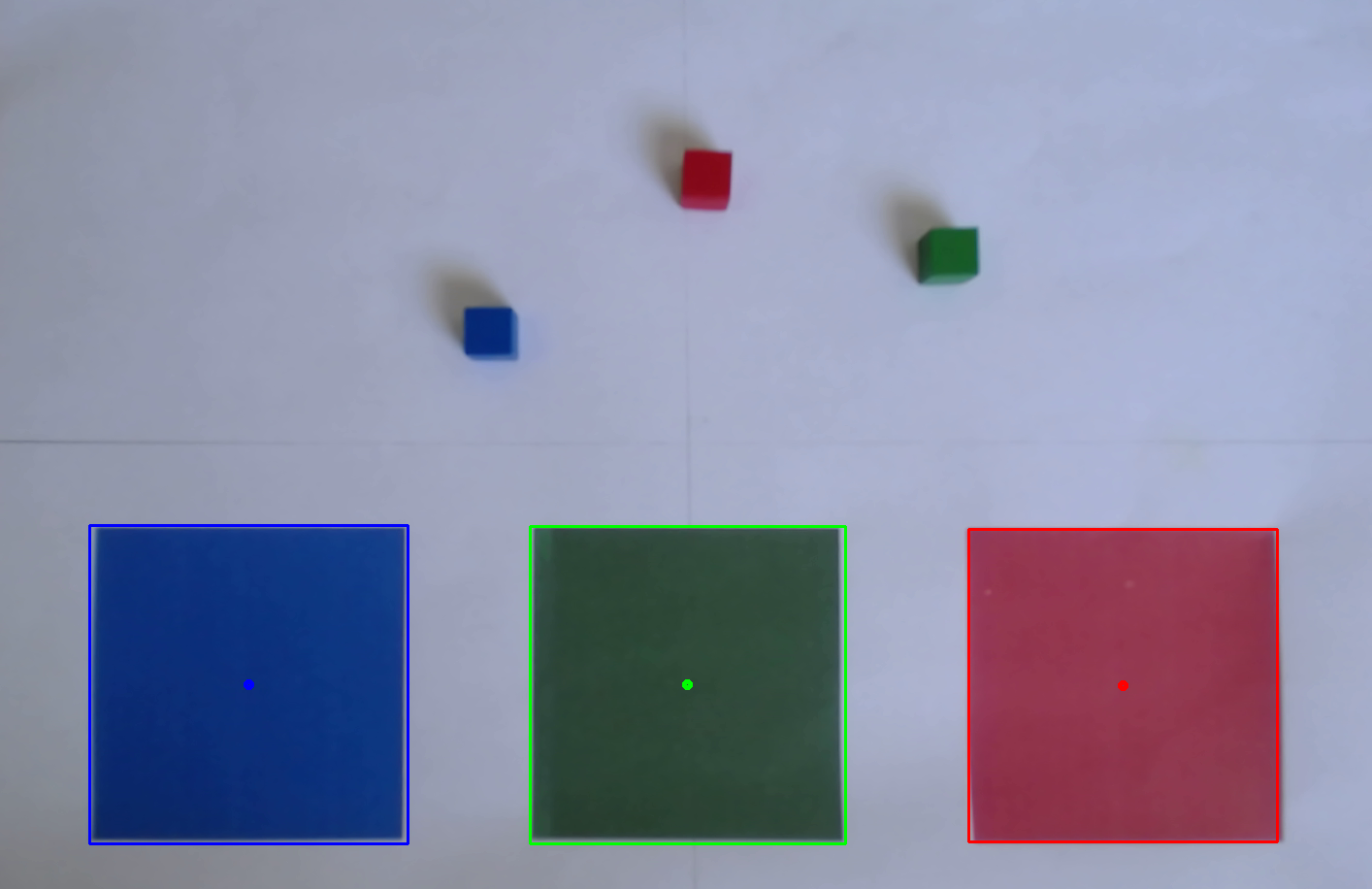
En effet, notre projet consiste à trier des pièces selon leur couleur, une caméra dont le repère sera fixe à celui du robot devra visualiser les pièces à trier ainsi que les zones de décharges. Ensuite le robot devra donc emmener chaque pièce au bon endroit. Pour réussir cela, il nous fallait quelques bases et prérequis. La robotique et la programmation qui y est associée nous étais complètement étrangère, pour rectifier cela, notre encadrant nous a donné des travaux pratiques de robotique ainsi que son cours afin de nous aider à découvrir le domaine, le sujet et le robot ainsi que ses utilisations. Ensuite nous devions inventer un moyen de fixer notre caméra à notre robot et enfin nous devions passer à l’étape la plus primordiale : la programmation finale.
Nos pièces sont des cubes RGB de 1 cm de côté et nos zones de décharges seront comme ci-dessous, la visualisation de la caméra se fait sur un format A4.
En essayant de réaliser ces travaux pratiques, nous nous sommes dépêchés afin de commencer la programmation car nous pensions être prêt et avoir tout compris. Cependant en se précipitant, on se retrouvait souvent complètement bloqué sans avoir vraiment compris ce que nous avions fait. C’est à ce moment-là que Monsieur BOIMOND nous a mis en garde en nous rappelant qu’il était important de comprendre comment cela fonctionnait afin de pouvoir le faire nous-même dans la programmation. Cela nous a été très bénéfique et nous avons finalement avancé plus vite après coup. Il nous a dit :
Il ne faut pas confondre vitesse et précipitation.
Une fois sur la bonne voie, nous avons réfléchi à un moyen de fixer notre caméra, le plus simple nous semblait être la réalisation d’une pièce en CAO. Ce n’était pas simple car nous devions trouver l’endroit parfait et le moyen le plus facile, la visualisation de la caméra devait être claire, sans avoir d’obstacles devant comme un bout de robot ou notre pince. Nous sommes parti sur une première pièce, qui s’est avérée être pratique et qui correspondait parfaitement au cahier des charges, cependant nous avons reprécisé certaines côtes et enlever un morceau qui gênait un peu lors de notre 2ème version.
Ainsi voici notre pièce finale :
Voici notre support monté sur le robot avec la pince. Ici le robot est en condition d’utilisation.
Ensuite logiquement nous avons entamé la programmation en python pour contrôler notre robot. Pour commencer il nous fallait détecter les cubes et les zones de couleur pour connaître leurs coordonnées. Pour cela nous avons créé un masque autour de la feuille et appliqué des filtres pour détecter les nuances de couleurs.
Détection des cubesDétection des zones
Par la suite nous allons expliquer notre codage pour la couleur rouge puisque l’idée est la même pour les autres couleurs.
D’abord nous avons codé pour connaître les coordonnées des cubes en pixels que nous avons converti en mm par calcul.
Puis effectuer la même chose pour les zones de couleurs.
Enfin nous avons codé le déplacement du robot de la manière suivante :
Le robot va aux coordonnées de notre premier cube et se place à 30 pixels au-dessus.
La pince s’ouvre
Ensuite il descend au niveau de la feuille
La pince se ferme
Puis une étape transitoire où il se déplace à des coordonnées se rapprochant de la position de base du robot
La seconde phase du déplacement débute avec le mouvement du robot au centre de la zone rouge
La pince s’ouvre pour libérer le cube
Le robot remonte de 30 pixels
Retourne aux coordonnées proches de sa position de base
Puis la pince se referme
Tadam ! Voilà le résultat !
PS : N’hésitez pas à mettre la vidéo en plein écran et en 1.5 pour une expérience optimale.
Voici donc le fruit de 100 heures de travail
Réussir ce projet a sûrement été l’une des choses les plus satisfaisantes de nos deux années à polytech. Il nous a apporté beaucoup de nouvelles connaissances, notamment en robotique et en programmation. Cependant, ce n’est que la première version d’un projet qui peut être optimisé. En effet, il y a encore quelques axes d’amélioration pour que ce système automatisé soit opérationnel en toutes circonstances. notamment au niveau du contrôle de la pince pour l’axer avec les cubes. Mais aussi la possibilité d’effectuer une nouvelle détection à chaque tri d’une pièce au cas où un cube n’aurait plus la même position.
Ainsi cette version finale et autonome pourrait être utilisée dans plusieurs domaines de l’industrie. Logiquement, on pense au tri de pièces au premier abord. Cependant, dans un aspect écologique cela pourrait être utile pour recycler les matériaux en fonction de leur couleur ou de leur forme. Cela entraînerait un gain de temps considérable pour l’Homme, et l’opportunité d’agir sur d’autres fronts pour notre planète.
Merci à vous d’être parvenu jusqu’ici !!
Nicolas BESSON – Nicolas BAUDUZ – Arnaud WACHOWIAK
Tout au long de ce blog vous allez découvrir le récit de notre épopée dans le monde de l’hydrogène, de l’innovation et des vélos. Gardez bien vos mains sur le guidon
Introduction
Nous sommes Malo, Anand et Paul, 3 étudiants en 2eme année de cycle préparatoire à Polytech Angers. Passionnés par l’innovation, la qualité et la mécanique, nous nous sommes donc vite intéressés à ce projet puisqu’il répondait à nos envies. De plus, l’enjeu du monde de demain nous tiens à cœur, c’est pour cela que l’opportunité de pouvoir concevoir un mode de déplacement plus respectueux de l’environnement est un critère majeur qui nous a attiré vers ce projet.
L’objectif principal de notre projet est de concevoir un vélo innovant alimenté par une énergie verte capable d’avoir une autonomie supérieur à celle disponible sur le marché, c’est à dire une autonomie supérieur à 150km. En plus de cela il nous fallait proposer une solution innovante qui n’existe pas sur le marché afin de répondre à notre cahier des charges.
Néanmoins, notre projet se séparait en deux grosses missions principales. La première fut une étude approfondi de l’hydrogène et la deuxième fut la conception de notre vélo sur le logiciel SolidWorks.
L’hydrogène
Pour commencer notre projet, nous avons fait de nombreuses recherches sur l’hydrogène. Ces recherches portaient sur ses normes de sécurité (transport, mise en bouteille…), son fonctionnement et sa production. Tout d’abord, il faut savoir qu’il existe très peu de normes quant à l’utilisation de l’hydrogène pour un vélo donc nous nous sommes basé sur les normes communes et sensées. Une des normes les plus complexes quant à son utilisation fut le fait que l’hydrogène doit être stocké dans une bonbonne faite d’une seule pièce, pas de soudures ni bonbonnes classiques. Cela nous a donc imposé de rechercher des fabricants de bonbonnes à hydrogène pour pouvoir avoir les bonnes caractéristiques et informations.
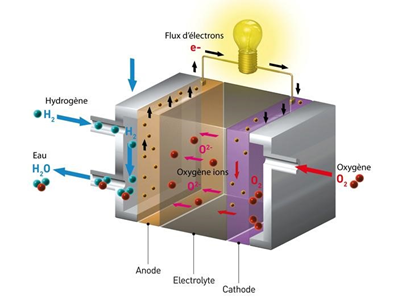
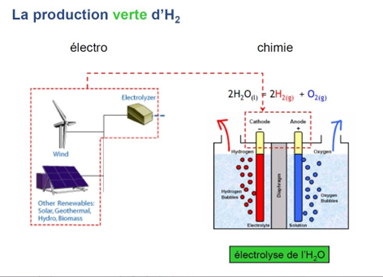
Une fois les normes analysées et pris en compte, il nous fallait comprendre comment on obtenait de l’électricité à partir d’hydrogène. Pour cela, il ne faut rien de plus qu’une pile à combustion. “Mais comment cela fonctionne ?” me demanderiez-vous. Ne vous en fait pas, le processus est plutôt simple à comprendre. Son fonctionnement repose sur un mécanisme appelé oxydoréduction, avec une pile à combustible (PAC) composée de deux parties : une cathode réductrice et une anode oxydante, séparées par un électrolyte contenant des catalyseurs. Mais pour que la pile fonctionne, elle a besoin d’être alimentée en hydrogène. L’anode provoque l’oxydation de l’hydrogène, libérant ainsi des électrons. Sous l’effet de l’électrolyte chargé en ions, ces électrons circulent dans un circuit extérieur, générant un courant électrique constant. À la cathode, les électrons et les ions se rejoignent, puis se combinent avec un autre combustible, généralement de l’oxygène. Cette réaction de réduction produit de l’eau, de la chaleur et un courant électrique. Une fois ces étapes réalisées, la pile continuera de fonctionner tant qu’elle sera alimentée en hydrogène.
Fonctionnement de la pile à combustible
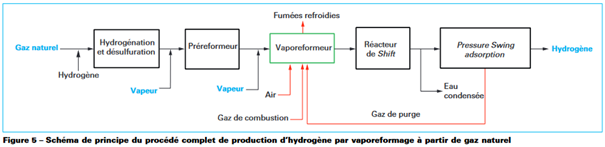
Néanmoins, la production d’hydrogène aujourd’hui n’est pas très verte. Malheureusement, cette dernière est produite à 96% par méthode de vapoformage qui consiste à extraire l’hydrogène grâce à des énergies fossiles. Tout cela est donc un peu contradictoire avec le but voulu de décarbonation due à l’utilisation de l’hydrogène. Mais, heureusement pour nous, après plusieurs recherches sur les sites du gouvernement nous avons trouvé que l’État français s’est engagé à débloquer une enveloppe de 20 milliards d’Euros sur la prochaine décennie pour investir dans des énergies vertes telles que l’hydrogène. Cette enveloppe ira notamment vers le financement de production d’hydrogène par électrolyse et biomasse.
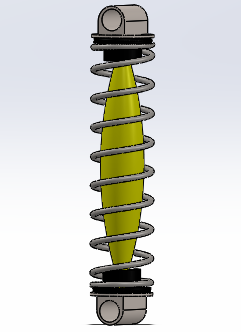
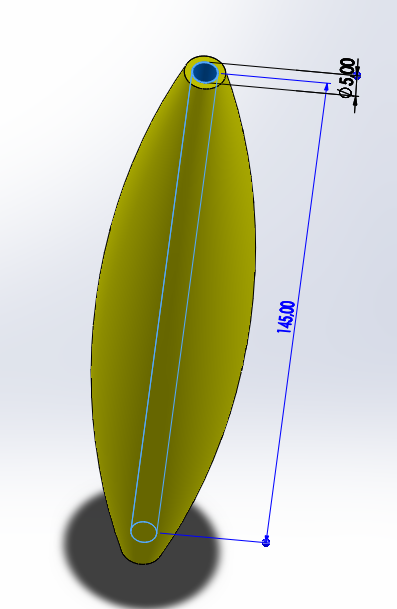
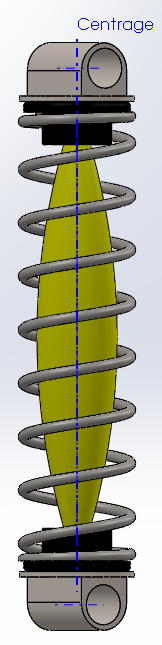
Pour la partie conception nous allons nous servir de l’amortisseur pour vous montrer la plupart des fonctions SolidWorks utilisées tout au long du projet.
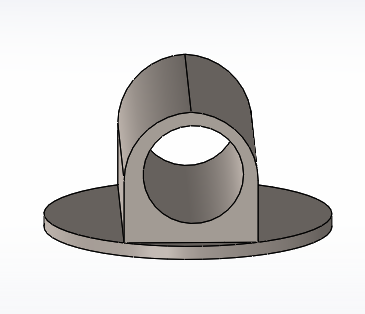
Pour commencer, nous avons fait la fermeture du ressort. Celle-ci s’est faite en 4 étapes simples.
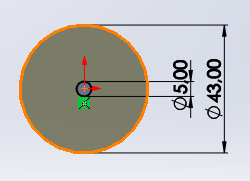
1 – On commence par un bossage extrudage pour la forme principale dans laquelle on perce un petit trou aux dimensions de votre choix.
2- Par la suite on fait la partie accroche qui est tout simplement un bossage extrudage des dimensions de votre choix.
3 – Pour faire l’arrondi de l’attache il suffit de lui appliquer un congé.
4 – Et enfin, pour finir l’accroche il vous faudra la percer grâce a la fonction enlèvement de matière où il vous faut mettre l’esquisse de la forme à enlever.
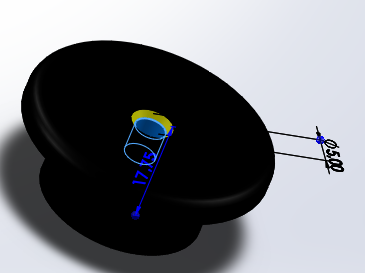
Suite à ça il faut faire le tampon (partie centrale) du ressort/amortisseur. Ce dernier se réalise en 2 étapes.
1 – Pour commencer il faut sélectionner la fonction bossage avec révolution. Suite à ça il faut définir un axe centrale. Puis il faut dimensionner le reste de son esquisse tel que sur l’image si contre. Une fois l’esquisse fermée et complète et fermer l’esquisse. Une fois cela fait la forme va se faire toute seule et voilà, vous avez votre forme.
2 – Ensuite, il suffit juste de faire un enlèvement de matière après avoir tracé votre esquisse.
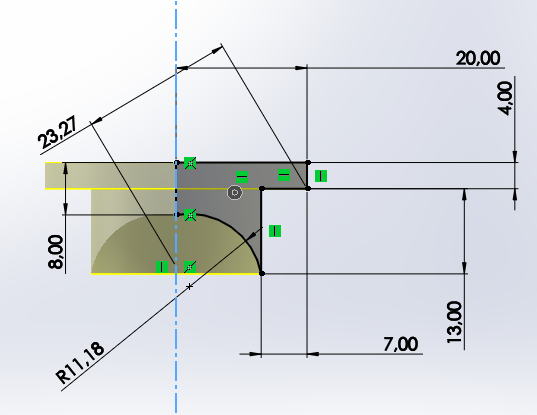
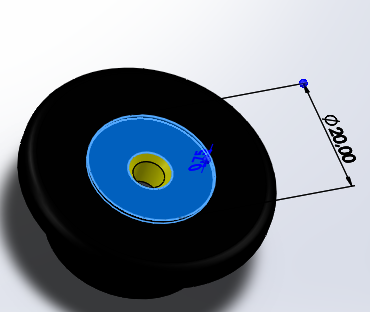
Après avoir réaliser votre tampon il vous faut réaliser son capuchon. Ce dernier se réalise en 4 étapes.
1 – Pour faire votre forme il vous faire un bossage avec révolution. Cela reviens à faire le premier processus du tampon, c’est à dire tracer l’esquisse voulu et la révolutionner.
2 – Une fois la forme obtenu n’hésitez pas à la rendre plus esthétique en arrondissant son arête supérieur.
3 – Percez un léger renfoncement, ceci est à but esthétique mais vaut quand même le coup.
4 – Percez le trou central de votre bouchon. Attention, ce dernier doit être de même diamètre que celui du tampon… Puis une fois cela fait rien ne vous empêche de rendre votre pièce plus esthétique avec des chanfrein ou encore des arrondissements.
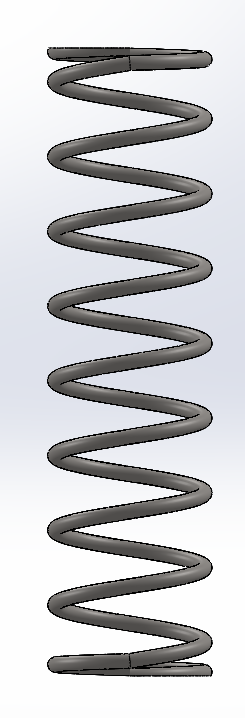
Maintenant nous allons passer à la partie la plus complexe de la conception de l’amortisseur; le ressort.
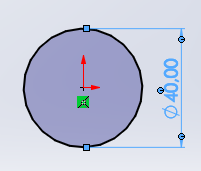
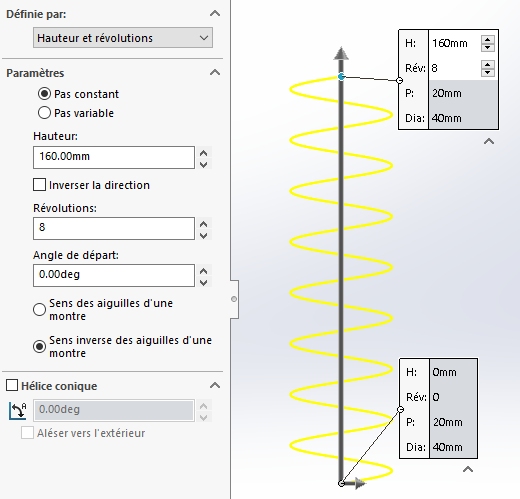
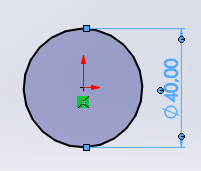
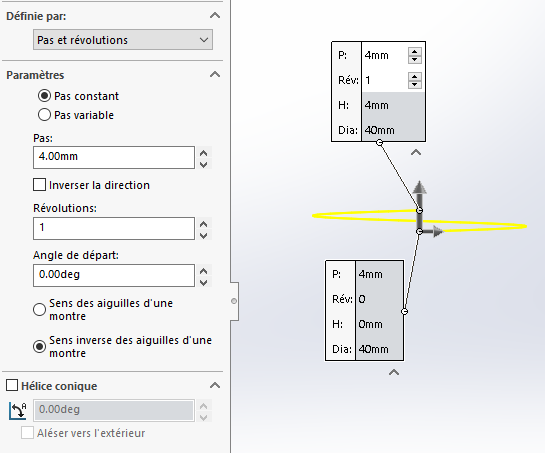
1 – Pour commencer il vous sélectionner la fonction “hélice” dans l’onglet “courbes”. Suite à cela, il vous sera demander de tracer votre base. Dimensionnez là selon vos besoins.
2 – Une fois votre base tracé il vous faudra dimensionner votre hélice. Suivez bien les spécificités ci-contre tout en sélectionnant la hauteur de votre choix.
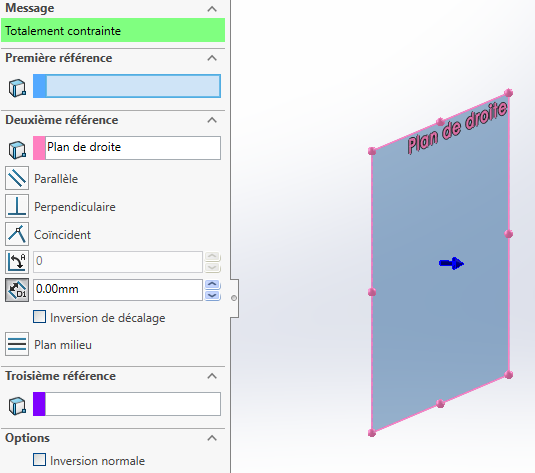
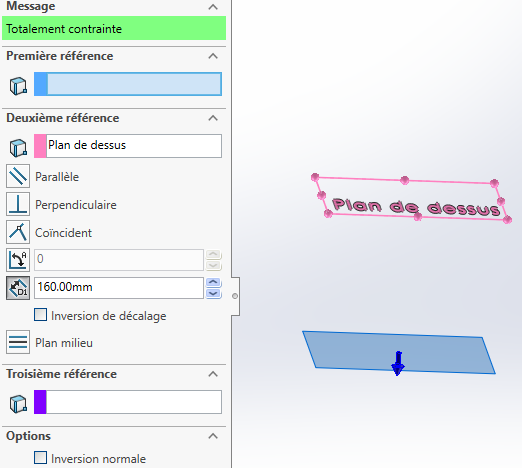
3 – Suite à cela, allez dans “Insertion” -> “géométrie de référence” -> “Plan”. Une fois cela fait créez votre plan parallèle au “plan de droite” déjà existant.
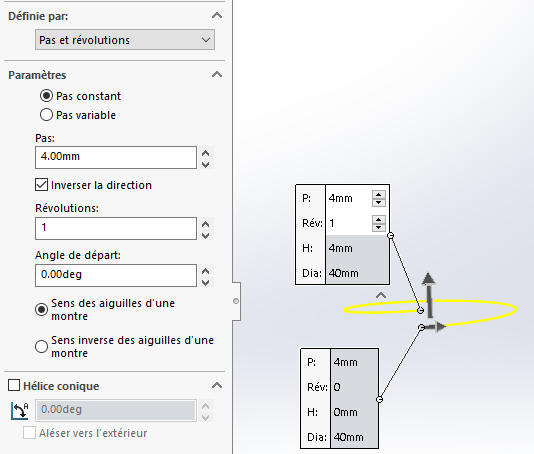
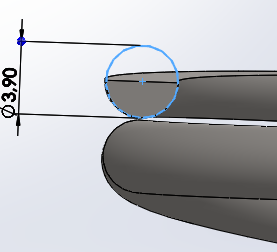
4 – Vous allez maintenant créer les extrémités de votre ressort. Pour se faire il va vous falloir sélectionner la fonction “hélice” dans l’onglet “courbes”. Suite à cela, il vous sera demander de tracer votre base. Dimensionnez là selon vos besoins.
5 – Une fois votre base tracée veuillez suivre les instructions suivantes pour obtenir une extrémité de votre ressort. Si cette dernière est dans le mauvais sens, ne vous en faites pas vous pouvez modifier ce dernier.
6 – Pour vous faciliter la conception de l’extrémité supérieur de votre ressort il va vous falloir créer un plan. Allez dans “Insertion” -> “géométrie de référence” -> “Plan”. Une fois cela fait créez votre plan parallèle au “plan de dessus” déjà existant.
7 – Maintenant que la conception d’hélices n’a plus de secrets pour vous il vous sera facile de faire les premières étapes. Une fois ces dernières effectuées suivez les étapes ci-contre. Si c’est dans le mauvais sens, ne vous en faites pas vous pouvez modifier ce dernier.
8 – C’est bien beau d’avoir trois courbes distinctes mais il serait encore plus belle d’en avoir une seule composée des trois courbes faites précédemment. Pour cela allez dans “Courbes” -> “courbe composite” puis sélectionner vos trois courbes. Le logiciel se charge de les relier pour vous.
9 – Maintenant que vous avez votre hélice en un seul morceau il vous faut créer son corps. Sélectionnez “Bossage balayé”, créez votre esquisse, sélectionnez l’hélice et le logiciel se charge du reste.
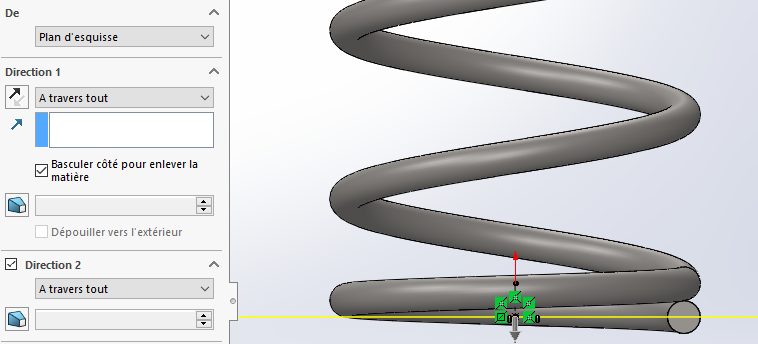
10 – Maintenant que vous avez votre ressort nous pouvons passez aux étapes finales. Pour ce faire, vous allez sélectionner “Enlèvement de matière extrudée”. Tracez un trait qui coupe le cercle de votre esquisse en deux. Puis mettez les paramètres ci-contre. Si jamais il vous reste seulement le mauvais bout, ne vous en faites pas, cliquez sur “Basculer côté pour enlever la matière”. Refaites cette même étape pour l’autre bout de votre ressort.
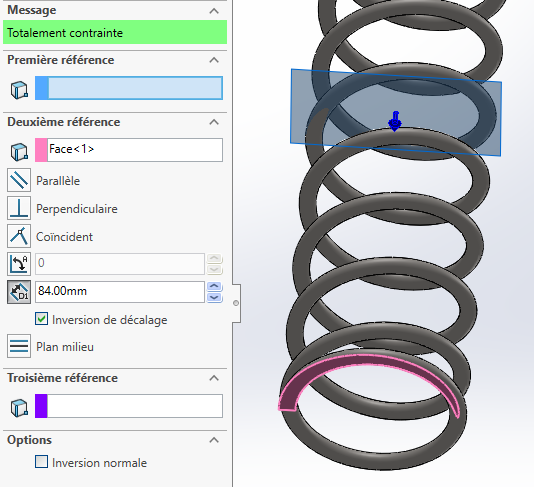
11 – Maintenant que votre ressort est complet il ne vous reste plus qu’à créer un plan central. Allez dans “Insertion” -> “géométrie de référence” -> “Plan”. Une fois cela fait créez votre plan parallèle au à la base coupée de votre ressort.
12 – Une fois toutes vos pièces terminées il ne vous reste plus qu’à les assembler. Servez vous des axes et des faces des pièces pour les contraindre entres-elles.
Maintenant que vous savez tout sur l’hydrogène et sur les principales fonctions SolidWorks vous êtes des pros pour pouvoir prendre en main un projet tel que celui-ci. Sur ce, nous espérons que cet article vous a plu et vous a été utile.
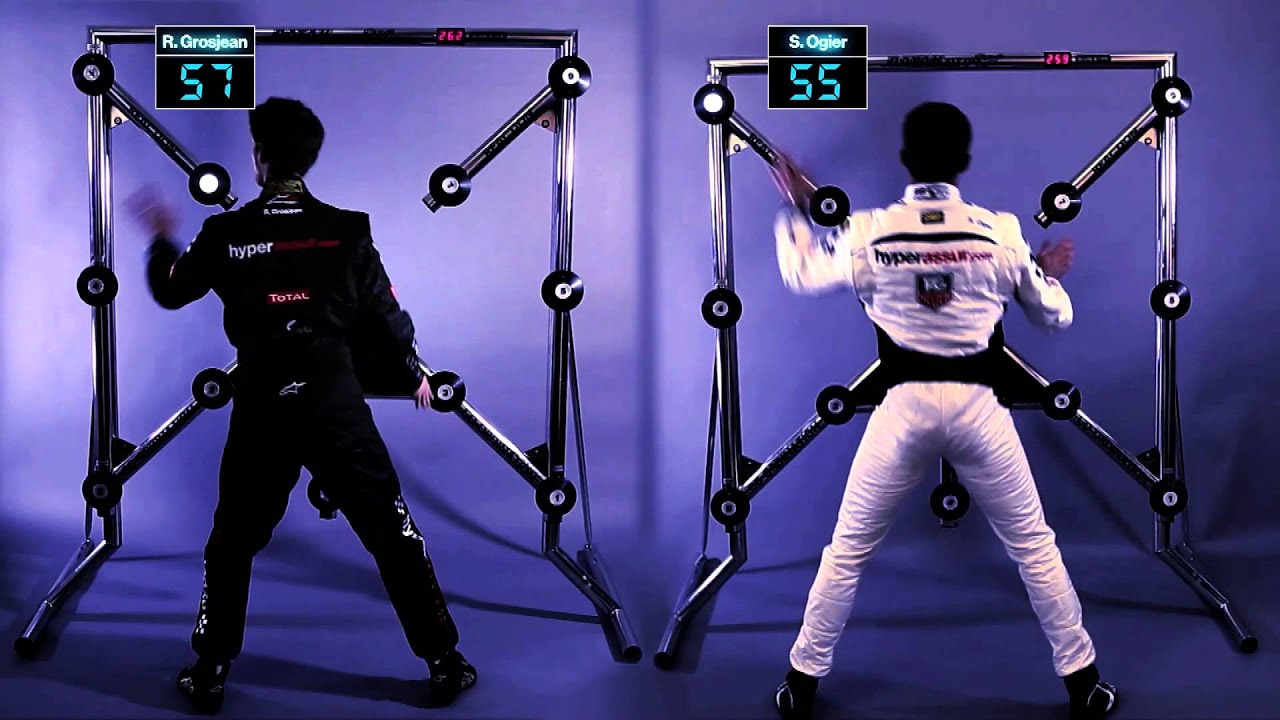
Nous sommes 4 étudiants en deuxième année de PEIP, Paul Garreau, Marin Goujon, Martin Mollat et Virgile Fasquel. Notre projet avait pour but de créer un grand mur interactif composé de plusieurs boutons poussoirs lumineux. Pour vous donner une idée ça ressemble un peu aux exercices de réflexes de pilotes de Formule 1.
Pour notre projet nous nous sommes inspirés d’un mur interactif crée en 2016 par Google ( voici une vidéo qui présente ce mur : https://youtu.be/58pxJ8z1Vow ) et d’un autre fabriqué par l’entreprise Preparaction ( une deuxième vidéo : https://youtu.be/9yIWuRmtsiA ).
A quoi peut servir notre projet ?
Notre mur interactif peut avoir plein d’utilisations : on peut l’utiliser comme un mur artistique en allumant les boutons dans l’optique de créer des formes de différentes couleurs. On peut aussi faire un mur ludique, sportif …
Pourquoi nous avons choisi ce projet ?
Nous avons choisi ce projet car nous avions envie de réaliser un jeu et ce projet semblait amusant. De plus il laissait beaucoup de possibilités. Aussi il nous permettait de toucher à tout, autant à l’électronique, l’informatique et le travail manuel sur la structure qu’à la conception et l’imagination.
Généralités
Notre groupe partait de zéro, le projet n’avait jamais été fait avant et nous n’avions aucune piste de départ, alors il a fallu réfléchir. Au début, nous avons beaucoup échangé entre nous, beaucoup testé, et il y a eu beaucoup d’échecs.
Finalement, nous avons opté pour un mur sportif, comportant une grande facette ludique. Ce type de mur laisse libre cours à notre créativité et nous enlève un travail colossal (et répétitif) de soudures et d’assemblages que nous aurait demander la création d’un mur artistique
Notre Projet se compose de 3 étapes principales :
Structure
Électronique
Programmation
Structure
Dès le départ, nous souhaitions créer la base du mur en bois pour des contraintes pratiques, écologiques et esthétiques. Nous avons également choisi de diviser le mur en modules (plaques de bois) pouvant chacun accueillir 4 boutons ainsi que les différents composants électroniques. Ces modules rendent donc le mur démontable et transportable. Le choix de mettre 4 boutons par module a été décidé avec les 4ème année, pour simplifier le réseau électronique. Chaque module mesure 40cm*40cm. Les trous accueillant les boutons ont été usinés grâce à la fraiseuse du FabLab. Cette facette du projet nous a donc permis de maitriser la fraiseuse.
Voici ci-dessous un module complet.
La couleur blanche pour les boutons a été choisie de sorte à laisser les différentes couleurs des LED se diffuser convenablement.
Afin de placer les boulons au bon endroit, nous avons créé et utilisé un gabarit découpé à l’imprimante laser.
Ensuite, il a fallu imaginer et réaliser une structure solide pour pouvoir accueillir tous ces modules. Nous avons opté pour des profilés en aluminium contenant des rainures en forme de T. Ce choix a été fait pour plusieurs raisons: l’aluminium est un matériau léger et relativement solide, de plus, grâce aux rainures, il était simple de visser dans les modules et de faire glisser les écrous dans les profilés. Au premier jour du projet, nous pensions réaliser seulement un mur (1 face), cependant, pour des soucis d’équilibre, l’idée nous est venue de faire deux faces opposées pour gagner en stabilité. Des renforts horizontaux d’environ 80cm ont tout de même été nécessaires pour avoir une structure correcte.
Electronique
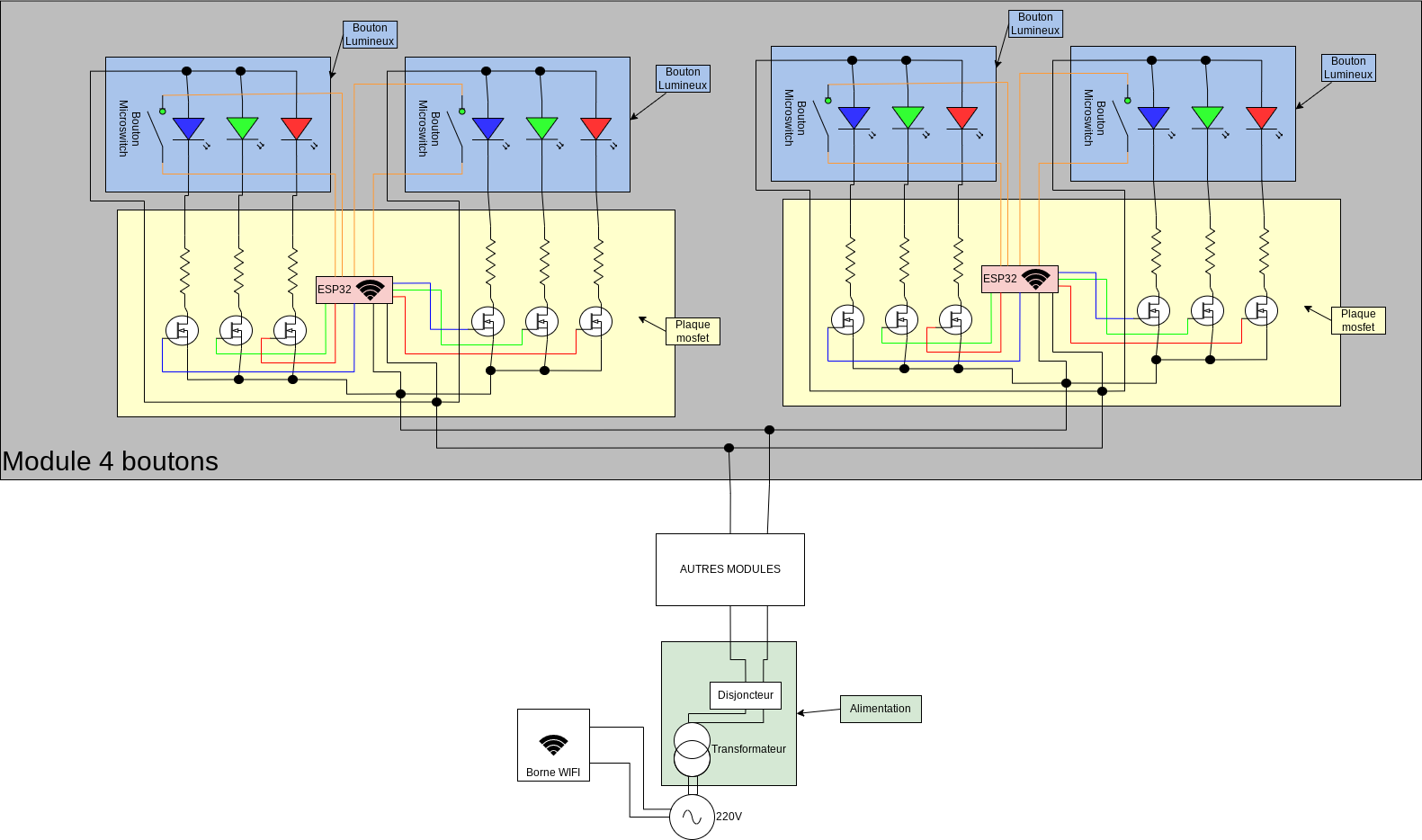
Toute la partie électronique du projet s’appui sur le schéma électronique suivant:
Dans ce schéma, on distingue très clairement trois sous-parties : l’alimentation, les cartes électroniques et enfin les LED.
Concernant les LED, ce fut un travail fastidieux de souder les 4 branches (bleu,rouge,vert,masse) pour chacune d’entre elles. Toutefois le résultat lumineux est satisfaisant puisque la lumière est puissante et diffuse. Les boutons, de couleur blanche, contiennent tous un micro-switch permettant de recevoir l’appui sur le bouton, indispensable pour le jeu de réflexe.
Les cartes électroniques ont été réalisées sur le logiciel EAGLE. Ce fut difficile de concevoir ces cartes indispensables à la réalisation de notre projet. Une carte accueille deux LED, un ESP32 et 3 résistances ainsi que 3 mosfets par bouton. Une carte ESP32 est une carte programmable dans différents langages informatiques (nous avons opté pour l’Arduino) pouvant communiquer par Bluetooth et WIFI. Nous n’avons seulement pas eu le temps d’exploiter ces fonctionnalités. Cela nous aurait permis de créer un jeu encore plus ludique puisque les ESP32 auraient été connectés entre eux. Cette carte est la base de l’ensemble du système électronique du mur. C’est ici que la connexion entre l’ordinateur et les éléments du mur s’effectue. Les résistances sont nécessaires afin de protéger certains composants notamment les LED. Pour les mosfet, ils permettent d’utiliser une alimentation différente de celle de la carte pour allumer les LED. Si le mosfet reçoit un courant de la carte, il laisse passer le courant entre l’alimentation et la LED Il agit comme un interrupteur avec en déclencheur le signal de l’ESP32.
De plus, le mur doit évidemment avoir un apport électrique; l’alimentation. Notre alimentation dispose d’un courant de 220V et la transforme en 5V, suffisant pour notre projet. Une alimentation fournit assez de courant pour une colonne. Chaque plaque recevra donc deux câbles provenant de l’alimentation. Toutefois, ce type d’alimentation présente un sérieux risque d’électrocution. Pour y remédier, nous avons créé une petite boite de Plexiglas par imprimante laser. Des trous sont présents sur les plaques pour permettre une certaine ventilation et pour laisser passer les câbles. N’ayant pas trouvé d’alimentation nous convenant dans le commerce, c’est M.Bouljroufi qui nous a fourni celle présente sur les photos.
Programmation
La partie de programmation a été assurée par les élèves de 4ème année. Ils ont réussi à créer plusieurs modes de jeux, disponibles à partir d’une seule interface. Pour faire le lien avec notre mur, il nous ont communiqué un code de test nous permettant de vérifier le bon fonctionnement de nos modules. Ce code est relativement simple : la LED s’allume à l’appui du bouton, et s’éteint lors d’un nouvel appui. Il suffit alors de transférer le programme sur les ESP32. Nous avons tout de même créé un nouveau programme afin de pouvoir jouer de la façon la plus ludique possible. Le nouveau programme présente un mode de jeu où des boutons vont s’allumer aléatoirement. D’abord en bleu, puis si aucun appui n’a été détecté la couleur deviendra verte, puis enfin rouge. Ainsi, si le mur est uniquement constitué de boutons de couleur rouge, le jeu est perdu. Le programme a été effectué sur Arduino.
Conclusion
Nous avons tous pris beaucoup de plaisir à travailler chaque semaine sur ce projet. Nous avons augmenté grandement nos compétences dans le domaine de l’électronique, la programmation ou encore le travail manuel. Finalement, nous regrettons seulement de ne pas avoir pu faire tout ce que nous souhaitions, l’objectif initial était d’effectuer 3 colonnes et non une seule pour créer vraiment un grand mur entier. L’objectif était également de faire fonctionner l’autre coté de la colonne pour créer une adversité entre les joueurs, nous voulions aussi connecter tous les ESP32 entre eux par WIFI et avoir des jeux plus ludiques. Notre principale satisfaction est de savoir que nous avons pleinement réussi à faire fonctionner une partie du mur, répéter le processus plusieurs fois pour l’agrandir n’aurait donc pas été un problème normalement. Tout au long du projet, la motivation et l’esprit d’équipe nous ont permis d’avancer sereinement sur notre mur. Certains moments étaient compliqués ou encore frustrants mais le résultat est bien là. Merci à toutes les personnes nous ayant aidé de près ou de loin sur ce projet.
Ci-joint notre compte rendu final sur le projet, si vous souhaitez en savoir plus sur notre aventure.
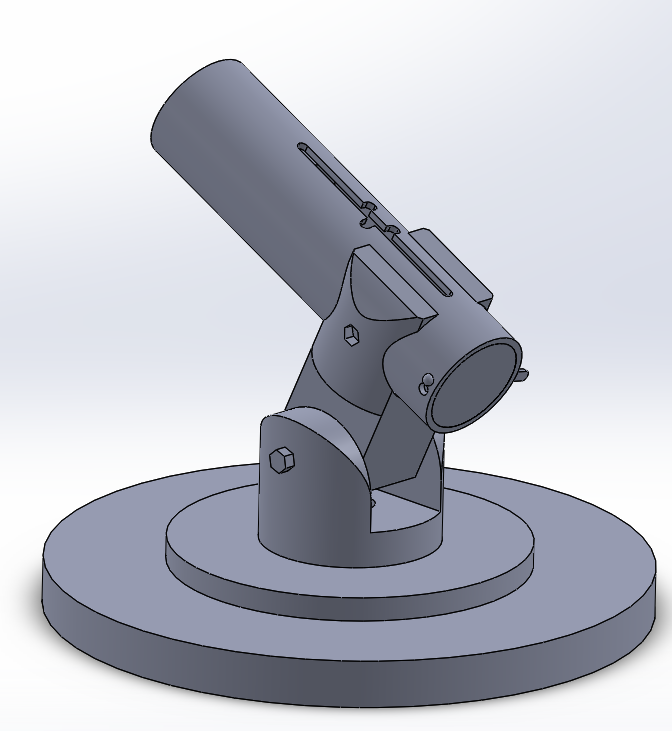
Réalisé par Noé CARO, Chloé MICHENEAU, Antoine BEILLOUIN et Martin BLANC tutoré par Monsieur KACHIIT, notre projet s’est porté sur la confection d’un propulseur de balle de ping-pong capable de propulser la balle à différentes distances (1 m, 1,50 m et 2 m). Ce projet exclusivement mécanique et pivotable serait utile pour des joueurs qui voudraient s’entrainer à recevoir des balles à des zones précises.
Aperçu de l’utilisation du propulseur de balle de ping-pong.
OBJECTIFS ET CONTRAINTES
-La propulsion doit être purement mécanique.
-Le lanceur doit tenir dans un cube de 250 mm de côté.
-Le lanceur doit être muni d’un système de réglages afin d’atteindre les différentes cibles.
-Le projectile est une balle de ping-pong dont le diamètre est compris entre 38 mm et 40 mm.
-Le choix des matériaux est totalement libre.
RÉALISATION DU PROJET
Étape 1 : Analyse du sujet / Choix et conception 3D des pièces
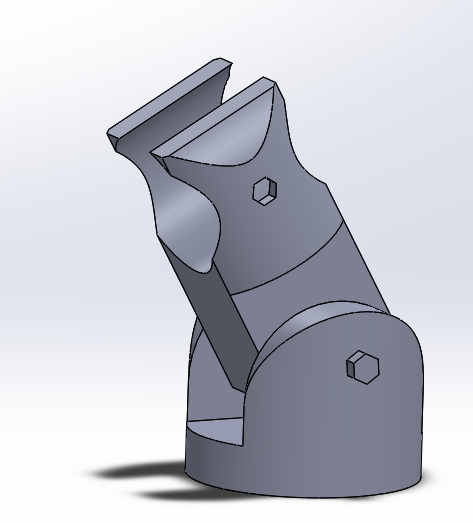
Avec les contraintes imposées, nous sommes partis sur l’idée de confectionner le propulseur qui fonctionnerait avec un ressort dans un tube. Ce ressort serait comprimé à différents niveaux en fonction de la distance souhaitée. Il serait le lien entre la base du tube et le support de la balle. Le tube serait maintenu à l’aide d’une charnière fixée sur un socle. Ce socle pourrait tourner par rapport à un autre grand socle plus lourd.
Charnière
La charnière :
La charnière se présente sous la forme d’un assemblage de deux pièces conçue pour être solide afin de supporter le poids du tube. La charnière permettra une liaison pivot qui servira à ajuster l’angle de projection.
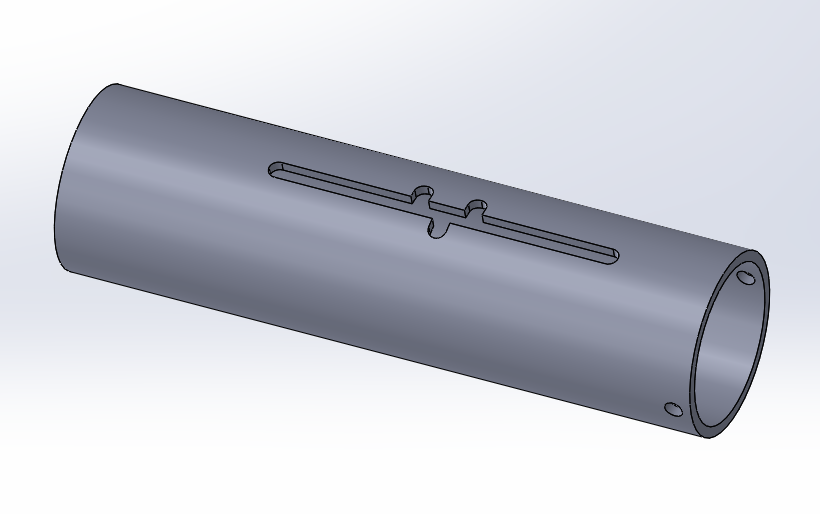
Le ressort serait compressé à l’aide d’un crochet inséré dans le support de la balle. Les différents crans se présenteront sous la forme d’une boîte de vitesses.
Le tube :
Les différents crans serviront à compresser plus ou moins le ressort afin de le projeter soit à 1 m, 1,50 m ou 2 m.
Système “boîte de vitesses”
Toutes les pièces sont confectionnées à l’aide de SOLIDWORKS, même si elles ne seront pas toutes usinées. Cela nous a permis de nous représenter la finalité de notre projet.
Conception de notre projet
Assemblage :
Voici l’idée de notre lanceur de balle de ping-pong, sans avoir décidé les matériaux.
Étape 2 : Choix des matériaux
Notre projet sera principalement construit en bois de hêtre, de plexiglas et de métal. Le bois qui est lourd est choisi pour les deux socles qui sont les pièces les plus lourdes. Le bois de hêtre est récupéré d’une chute (démarche écologique), c’est un bon rapport qualité-prix. On retrouvera ce matériau dans le support du ressort qui se retrouve à l’arrière du tube. Nous avons ensuite désiré choisir un tube en plexiglas transparent. Ce matériau en plus d’être un bon rapport-qualité facilement usinable permet aussi de voir le système de propulsion en entier. Les pièces métalliques sont nécessaires pour apporter une stabilité grâce à l’heure solidité (la charnière). Le support de balle sera lui aussi en acier car il nécessaire d’avoir un support lourd afin d’avoir un écart important entre chaque cran de la “boîte de vitesses”.
Cependant, nous effectuerons les tests avec d’autres matériaux pour le support de balle associés à différentes raideurs afin de prévoir de possibles forces de frottements qui n’auraient pas été prises assez en compte.
Étape 3 : Commande des pièces
Après les calculs théoriques, il nous faut maintenant trouver / confectionner les pièces pour que la pratique se rapproche au mieux de la théorie. Les pièces en bois seront usinées à Polytech dans un bloc de bois acheté chez Leroy Merlin tout comme les vis et les boulons. Le support de balle en acier, les ressorts ainsi que le tube en plexiglas viennent eux d’entreprises spécialisées.
Étape 4 : Usinage / Assemblage
Ayant les pièces à disposition, la prochaine étape est d’usiner les pièces. Les pièces en bois (les deux socles et un support de balle) sont découpées à l’aide d’une fraiseuse. Une découpe laser est plus adaptée pour le support de balle en plexiglas. Le tube en plexiglas est lui percé puis limé dans sa longueur. La charnière qui est la pièce la plus complexe est confectionnée avec une imprimante.
En assemblant les pièces usinées, nous sommes relativement satisfaits du résultat, la pratique ressemble plutôt bien à la conception 3D. Les déceptions sont juste l’opacité du tube et les imperfections dans les découpes de la fente du tube. Ces défauts s’appliquent sur le prototype mais seront corrigés pour les prochains tubes.
Premier prototype de notre propulseur de balle
Étape 5 : Tests et résultats
Premier test avec les matériaux et le ressort de notre choix initial :
Lancer à 1 m : D=0.65m
Lancer à 1,5 m : D=0.7m
Lancer à 2 m : D=1.02
Il est donc évident que des forces de frottements n’ont pas été prises en compte. Nous avons donc procédé autrement afin de respecter le cahier des charges. Nous avons choisi d’utiliser un marqueur sur un tube pour définir les taux de compression expérimentalement. En utilisant des taux de compression environ deux fois plus grands que d’après nos calculs, nous retrouvons bien les distances imposées.
Notre projet en action !
AVANTAGES DE NOTRE PROPULSEUR DE BALLE
Notre projet est idéal pour s’entraîner :
Il est parfait pour améliorer vos coups, que ce soit les coups droits ou les revers. La balle arrive à plusieurs distances que vous pouvez ajuster à votre guise.
La conception et la construction de notre projecteur de balle respecte la cause écologique :
Il est majoritairement constitué de matériaux recyclables (acier inoxydable, aluminium, bois…). Il est aussi réalisé principalement à Polytech Angers et a donc une faible empreinte carbone.
Le mode d’emploi est simple et instinctif :
Pas besoin d’avoir fait de grandes études pour comprendre son fonctionnement, il suffit de baisser un levier dans différents cran en fonction de la distance souhaitée et de faire pivoter le socle pour modifier la direction de la balle.
Notre projet est entièrement mécanique :
Il ne nécessite en aucun cas d’énergie électrique ou autre. Vous ne serez jamais embêter par une prise ou des problèmes de batterie.
CONCLUSION
Nous sommes fiers et satisfaits de notre travail en général. Nous avons tous aimé travailler en collaboration sur ce projet et nous mettre dans la peau d’un ingénieur. Nous sommes forcément déçus que nos calculs initiaux n’aient pas été concluants mais nous avons réussi à nous adapter et c’est le principal.