L’objectif de ce projet est de commencer à utiliser l’outil spatial.io de Google et de créer un environnement virtuel où des rencontres créatives peuvent avoir lieu.
Un nouvel outil de conception collaborative basé sur la technologie de réalité virtuelle disponible. Ces outils vous plongent dans un environnement virtuel. Un espace partagé où les utilisateurs peuvent communiquer via leurs avatars.
Les objectifs de ce projet sont multiples : (1) utiliser les outils Spatial.io, (2) créer avatars et espaces partagés, (3) l’appropriation des technologies interactives proposées, (4) Simulation de travail collaboratif.
Spatial.io permet des séances de créativité dans des environnements partagés.
Présentation du logiciel utilisé, Spatial.io :
Spatial.io est un métaverse développé par google, sorti en 2016, accessible via de simples liens hypertextes. Ainsi, si vous souhaitez partager un lien depuis une réunion Zoom ou Google Meet, il est très simple d’inviter des personnes dans votre espace privé. Pas besoin d’avoir un portefeuille de crypto-monnaie ou même un compte spatial comme dans d’autres métaverses, il suffit de cliquer sur un lien pour être transporté directement vers un espace virtuel dédié. Ainsi, inviter des collaborateurs à organiser des conférences ou des réunions professionnelles est très simple. De même, planifier un recrutement individuel en 3D exactement à votre image est aussi rapide que de partager un lien Teams.
Travaux réalisés :
Pour notre projet, nous nous sommes lancés dans la création de plusieurs espaces collaboratifs connectés entre eux par des portails.
Si vous souhaitez visiter ces différents espaces collaboratifs vous pouvez y accéder grâce à ce lien :
Dans l’ensemble, ce projet nous a beaucoup apporté. Nous avons acquis de nouvelles connaissances et avons eu l’opportunité de découvrir une grande variété de métaverse, ce qui nous a permis de nous enrichir personnellement. Si vous êtes actuellement en PEIP 2 et que vous souhaitez choisir un projet, nous vous recommandons fortement de choisir le projet Spatial.io (encore plus si vous souhaitez choisir la spécialité SAGI en troisième année).
Lesséismessont des phénomènes naturels liés aux mouvements des plaques tectoniques, souvent dévastateurs en termes de dégâts matériels et en vies humaines. On dénombre chaque année plus de 300 000 séismes dans le monde de magnitude supérieure ou égale à 2.
Dans la ville de Tainan, au sud de Taïwan, le 6 février 2016, un immeuble effondré après le tremblement de terre de magnitude 6,4. PHOTO AFP/ CTI TV
C’est en effet, une erreur de conception architecturale qui est à l’origine de l’effondrement des bâtiments lors de la propagation d’un séisme. Il est donc primordial de faire les bons choix lors de la construction d’un bâtiment. La plupart des dégâts causés par un séisme sur un bâtiment sont liés à des déplacements excessifs et à une conception qui ne prend pas suffisamment en compte les effets dynamiques.
1-NOTRE PROJET
Dans le cadre de notre projet de deuxième année, notre objectif est d’étudier et de modéliser un bâtiment soumis à un séisme en se basant sur la construction parasismique.
Pour réaliser ce projet, nous avons adopté le point de vue d’un ingénieur pour comprendre comment un bâtiment se déformait, se dégradait puis se cassait sous l’effet d’un séisme. En effet, le rôle de l’ingénieur en bâtiment est d’effectuer des études préalablement à la construction du bâtiment. Il doit étudier le projet de construction du bâtiment et effectuer des simulations pour déterminer les procédés techniques à utiliser. Il doit également mener des études de conception sur le dimensionnement ou encore la solidité des matériaux et enfin chiffrer les coûts de construction.
La première étape a donc été une étape de recherche, indispensable pour le commencement d’un projet. En effet, il est important de comprendre l’impact des séismes sur les constructions, mais également de connaitre toutes les normes de construction parasismique qui peuvent varier en fonction des zones de construction.
L’étude de ces-dernières est la base du processus de construction du bâtiment. Il s’agit en effet de connaitre les composants du sol, mais également, la zone de sismicité dans laquelle le bâtiment va se trouver.
Par la suite, il faut faire les bons choix en termes de dimension, de nombre d’étages, et de forme du bâtiment en fonction de son utilité. Les caractéristiques vont varier si le bâtiment est une habitation, un établissement recevant du public (ERP), un pont, etc.
Une fois les plans de construction bien définis, il est indispensable d’avoir recours aux calculs. Ces calculs sont réalisés grâce à l’Eurocode 8, la réglementation européenne appliquée à la construction parasismique. Ces calculs vont permettre de choisir les bons matériaux, les meilleures fondations qui seront adaptées au bâtiment et type de sol, et le dimensionnement adéquat en fonction des charges subies par le bâtiment. Deux calculs sont notamment très importants : le premier concerne l’Etat limite de service (ELS) qui consiste à vérifier que le bâtiment ne subisse de déformations irréversibles mettant en jeu la sécurité des personnes. Le deuxième est l’Etat limite ultime (ELU) qui consiste à déterminer la charge maximale pouvant être subie par le bâtiment avant qu’il ne s’effondre, qu’il n’atteigne un état de ruine. Pour vérifier ces deux états limites, il faut imiter les conditions réelles des charges créées par un séisme sur le bâtiment, et cela par les calculs réalisés et avec l’aide d’un logiciel de modélisation.
Pour finir, après avoir récupéré toutes les données nécessaires à la construction, il est nécessaire de faire une simulation 3D pour avoir un meilleur aperçu de la finalité de la construction. Le logiciel Revit est un logiciel de modélisation 3D qui permet également de faire des simulations de séismes afin d’analyser la stabilité du bâtiment modélisé lors de séismes.
2-NOTRE ETUDE DE CAS
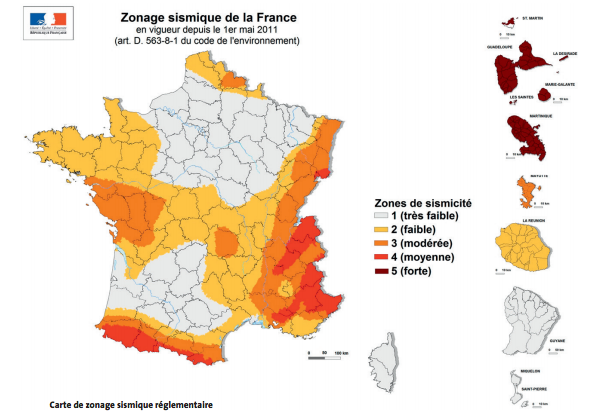
Dans ce projet, nous avons décidé de créer quelque chose de concret en faisant une étude de cas. Nous avons choisi de modéliser une habitation au niveau d’Annecy où la zone de sismicité est de 4 (sismicité moyenne). L’habitation se trouve à plus d’1km du bord de la rive du lac pour des questions de normes.
Le zonage sismique de la France
Grâce à l’application Géoportail, nous avons pu connaître le type de sol à Annecy qui est du calcisols. Le calcisols est un matériau calcaire qui possède des propriétés argileuses.
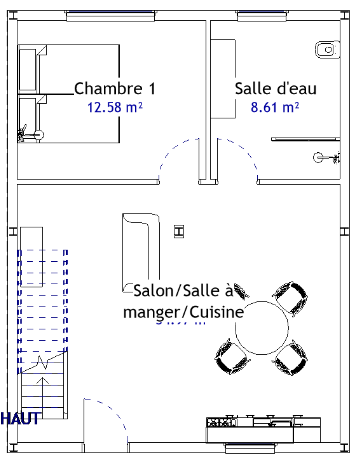
Concernant le type de bâtiment, nous avons décidé de créer une habitation avec une forme simple, une base rectangulaire. Les éléments parasismiques que nous lui avons attribués sont essentiellement 9 poteaux en béton armé. Les caractéristiques spécifiques de notre bâtiment sont les suivantes :
Au niveau des fondations, nous avons donc un radier de 30 cm d’épaisseur et une dalle porteuse en béton armé coulée à même le sol. Ce type de fondation est idéal en présence d’un sol meuble, relativement instable.
Au rez-de-chaussée, nous avons un plateau de 64 mètres carrés avec 4 ouvertures sur l’extérieur. La hauteur sous plafond est de 2.66 mètres. (Portes)
Plan du rez-de-chaussée de la maison avec le logiciel Revit
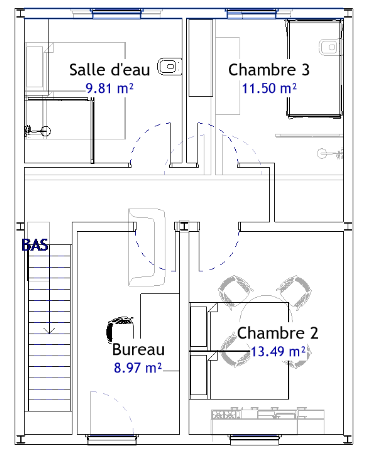
Au Premier étage, nous avons la même surface qu’au rez-de-chaussée, c’est-à-dire 64 mètres carrés. Cet étage est accessible par un escalier partant du rez-de-chaussée. (Ouvertures, portes, cage d’escalier)
Plan du premier étage de la maison avec le logiciel Revit
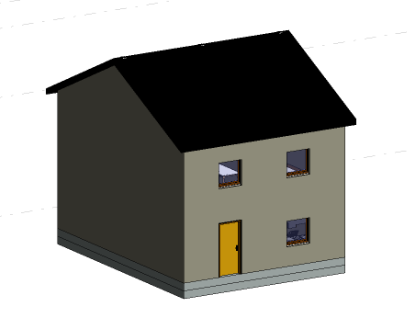
Nous avons modélisé notre maison sur le logiciel Revit ci-dessous :
Modélisation de notre maison grâce au logiciel Revit
3-ELEMENTS TECHNIQUES PARASISMIQUES
De plus, certains éléments de construction parasismique doivent être pris en compte lors de la modélisation de structures spécifiques comme les grands bâtiments pour limiter les dégradations causées sur celui-ci par d’éventuels séismes.
Il est tout d’abord possible d’utiliser un joint parasismique. Ce joint est un espace vide de tout matériau que l’on réalise entre deux constructions mitoyennes dans notre cas, et plus généralement en zone urbaine où le nombre de bâtiments est assez dense. Les règles de mise en place de ce joint parasismique sont données par l’Eurocode 8. Dans le cas d’une zone de sismicité de niveau 4, la largeur du joint doit être de 6 cm. De plus, en zone sismique, tout joint de dilatation doit être remplacé par un joint parasismique en raison de ces impératifs de non-entrechoquement. Le joint de dilatation a pour fonction de permettre au béton de se dilater et de se contracter librement sous l’effet des variations de température au fil du temps.
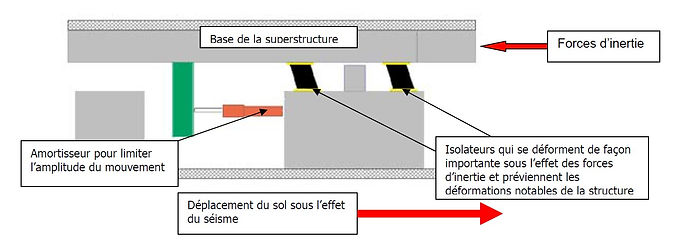
Deuxièmement, il peut être utile que la structure repose sur une isolation de la base qui fait la liaison entre le bâtiment et le sol. Dans cette isolation de base, on peut retrouver le caoutchouc qui est reconnu comme le matériau le plus déformable. On retrouve également dans cette isolation de base des amortisseurs qui vont permettre de limiter les mouvements lors de séismes. Ce type d’isolation à la base est plus adapté pour de plus grandes constructions comme des gratte-ciels ou encore des ponts mais n’est pas nécessaire pour une habitation simple.
Pour illustrer cette isolation, voici un petit schéma explicatif :
Isolation sismique de la base pour des bâtiments parasismiques
4-CONCLUSION
Ce projet a été très enrichissant et nous a permis de faire un premier pas dans le monde de l’ingénierie en nous mettant dans la peau d’un ingénieur en bâtiment. Nous avons consacré beaucoup de notre temps aux recherches, mais également à modifier notre projet pour que notre construction soit la plus adaptée aux effets sismiques et la plus parlante pour le lecteur, d’où le choix d’un bâtiment d’habitation tel qu’une maison.
Ce projet nous a aussi permis d’acquérir de l’autonomie au travail, mais également de faire preuve de rigueur et de coopération.
Nous remercions Stéphanie Chahine pour nous avoir accompagnés et guidés tout au long de ce projet.
Flavie SEBILO, Clément ANDREU SABATER et Emma BARBEAU
Relier les centres de cercles avec le Robot Dobot Magician
Bonjours à toutes et tous !
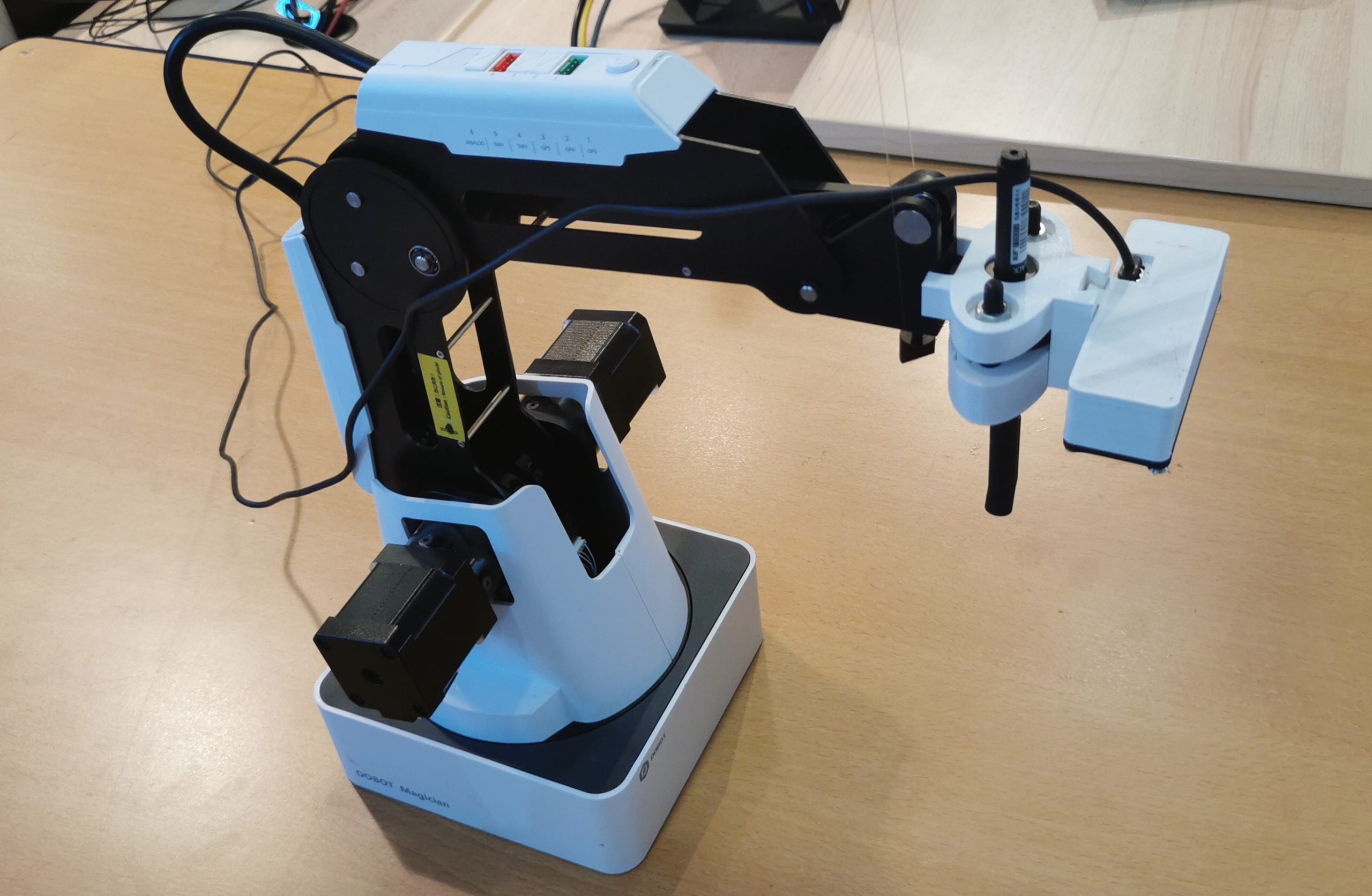
Nous sommes trois étudiants en deuxième année du cycle préparatoire à Polytech Angers (Enzo, Hippolyte et Léo). L’objectif de notre projet est de détecter puis relier des cercles de mêmes couleurs grâce à un feutre tenu par le Robot Dobot Magician. L’une des contraintes demandées est d’avoir une caméra directement accrochée au robot et non posée à côté de ce dernier. Un robot tel que le Dobot Magician, est à but didactique, mais le fonctionnement algorithmique pourrait être utilisé à grande échelle, en usine, pour trier et réorienter un ensemble de pièces par exemple.
Si vous le souhaitez, une vidéo de présentation est disponible (avec tous les documents de notre projet) dans ce lien drive :
Nous avons choisi ce projet, car chacun des domaines qui allaient être abordés nous plaisaient : Conception ; Programmation ; Robotique et Impression 3D. De plus, nous avions tous les trois le souhait d’aller en SAGI l’année prochaine donc travailler sur ce projet allait nous apporter une première idée plus poussée de ces domaines
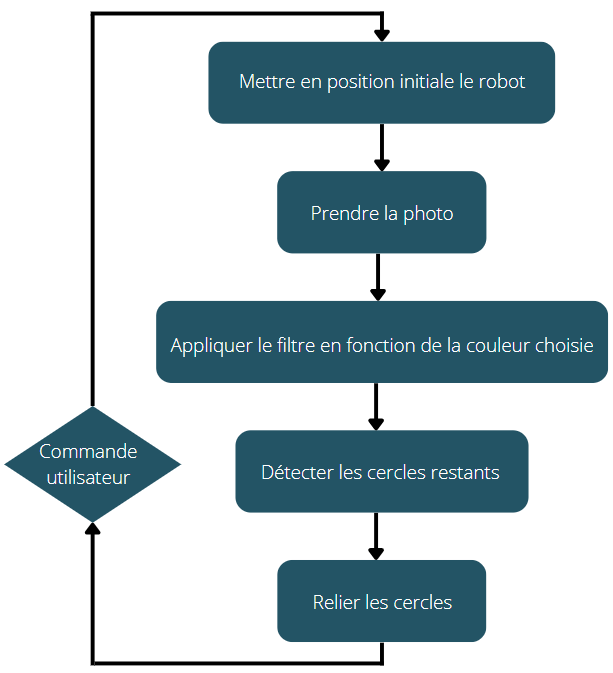
Notre Projet se compose de 5 étapes principales :
Expérimentation
Recherche de solutions et Modélisation de l’outil caméra
Développement du système de control
Développement du code de traitement d’images
Développement de l’interface graphique
Nous avons entamé notre projet par une phase de recherche.
Nous nous sommes appuyés sur les TP fournis par notre professeur référent pour nous familiariser au matériel. Comme le robot Dobot magician, la caméra, les mathématiques associés et les logiciels propres à notre projet.
Nous avons principalement utilisé 3 logiciels. Tout d’abord, DOBOTSTUDIO, le programme fourni par les constructeurs afin de contrôler le robot. Ensuite, SOLIDWORKS, le logiciel de CAO, que nous connaissions le mieux, il nous a permit de conceptualiser tous les prototypes. Pour finir, nous avons utilisé PYCHARM accompagné de la bibliothèque associée, un encodeur python, avec lequel nous avons développé notre traitement d’image, notre gestion de mouvement du robot et l’interface graphique.
Conception du support caméra
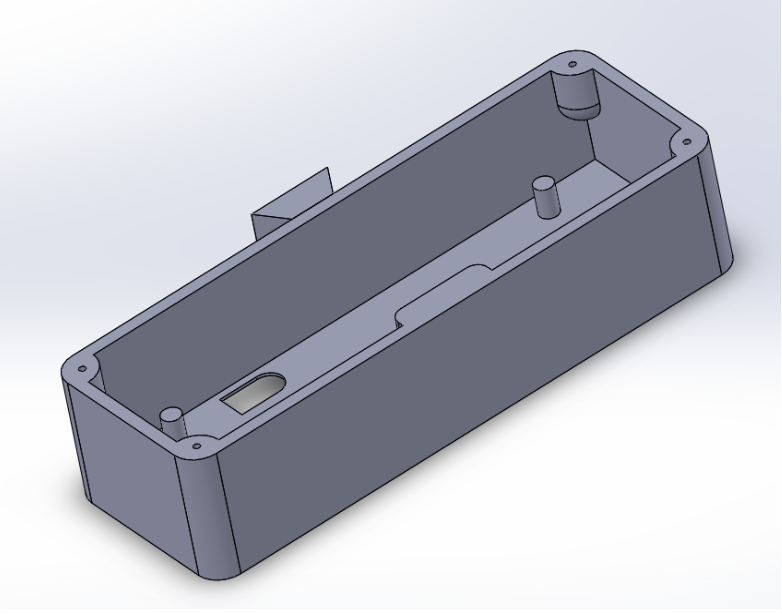
Notre support se divisera en 2 parties. La première est le boitier qui contiendra la carte mère ainsi que la lentille que nous avons extraite de la caméra. Afin, que la lentille soit le plus parfaitement possible parallèle à la feuille, nous avons rajouté des renforts pour fixer la carte dans le boitier. L’objectif est de réduire au maximum le décalage qu’un angle entre la lentille et la feuille puisse créer.
Le Boitier
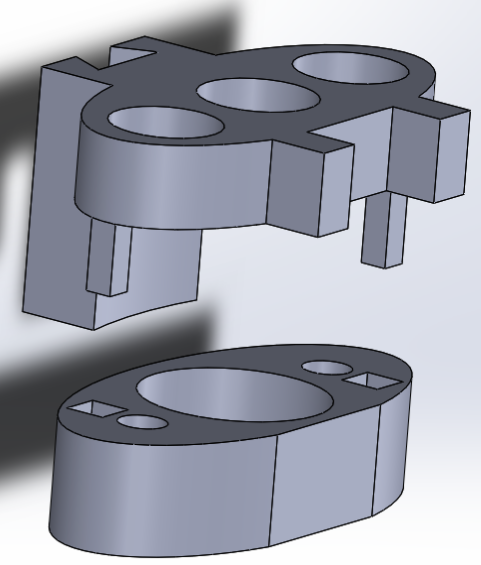
La deuxième partie du support caméra, permet d’accrocher le boitier au robot, il se divise en 2 sous-parties qui viennent se fixer autour du feutre. Le boitier vient donc s’accrocher par l’intermédiaire d’un rail sur lequel le jeu a été calculé de façon à ce qu’il glisse facilement, et soit parfaitement stable lors des mouvements du robot.
Accroche
Accroche Solidworks
Après avoir tout imprimé et assemblé, voici le résultat :
Robot Dobot Magician avec le support caméra
Programmation du robot
On va maintenant s’intéresser à l’autre partie également importante de notre projet, à savoir la programmation.
En effet, le but étant de relier tous les cercles de la même couleur, on se doutait dès le début qu’il y aurait un travail conséquent sur le traitement d’image, domaine dans lequel nous n’avions que peu d’expérience.
Nous avons créé un programme de près de 290 lignes en langage python, car les fonctions qui permettent de contrôler notre robot sont écrites dans ce langage.
Nous avons passé nos premières séances sur la programmation à comprendre et à tester ces différentes fonctions afin de voir comment le robot réagissait aux différentes commandes et d’identifier ce qui pourrait potentiellement poser un problème par la suite.
À partir de là, il ne nous manquait plus qu’à définir ce qu’on allait devoir faire pour ensuite créer notre algorithme.
À partir de cet algorithme, nous avons pu créer un programme fonctionnel, mais une autre idée nous est venue : celle de faire une interface graphique qui permettrait à l’utilisateur de contrôler le robot étape par étape et qui serait beaucoup plus agréable esthétiquement parlant.
L’interface Graphique
L’interface graphique avait de nombreux intérêts (accompagnés de nombreux inconvénients), notamment la facilité d’utilisation pour quelqu’un ne connaissant pas notre projet.
interface graphique de notre programme
Le bouton Home (en haut à gauche) permet au robot de se placer en condition initiale et de recalibrer ses déplacements. Juste en dessous, c’est le bouton qui place le robot en position initiale, sans la phase de recalibrage, ainsi, on évite cette étape qui peut être plutôt longue. Cependant, lors de l’activation du programme, il est conseillé d’utiliser le home du robot (premier bouton) afin d’être plus précis. À nouveau en dessous, c’est le bouton qui active la prise de la photo. Afin d’avoir une photo de bonne qualité, mais surtout utilisable, il faut placer le robot en conditions initiales. Enfin, les ronds de couleurs (milieu-bas) permettent de choisir quels cercles on souhaite relier. Bien sûr, cette étape nécessite d’avoir prit la photo avant.
Au milieu de cette interface se trouve le logo de notre projet, de son nom Tomi, c’est notre mascotte.
Enfin voici une vidéo de notre robot après toutes ces étapes :
Bilan
Ce projet nous a beaucoup apporté, que ce soit en programmation et sur le traitement d’image où nous n’avions aucune connaissance, ainsi que sur le fait de devoir toujours faire face à des problèmes imprévus lorsque nous commencions une tâche. On peut prendre en exemple la lumière pour le traitement d’image qui nous a posé beaucoup de problème !
Pour nous le plus important dans ce projet a été le travail de groupe et l’importance de s’entourer des bonnes personnes afin d’échanger et de s’entraider au maximum !
Vous pouvez retrouver tous nos documents ainsi qu’une vidéo de présentation du projet dans ce lien drive :
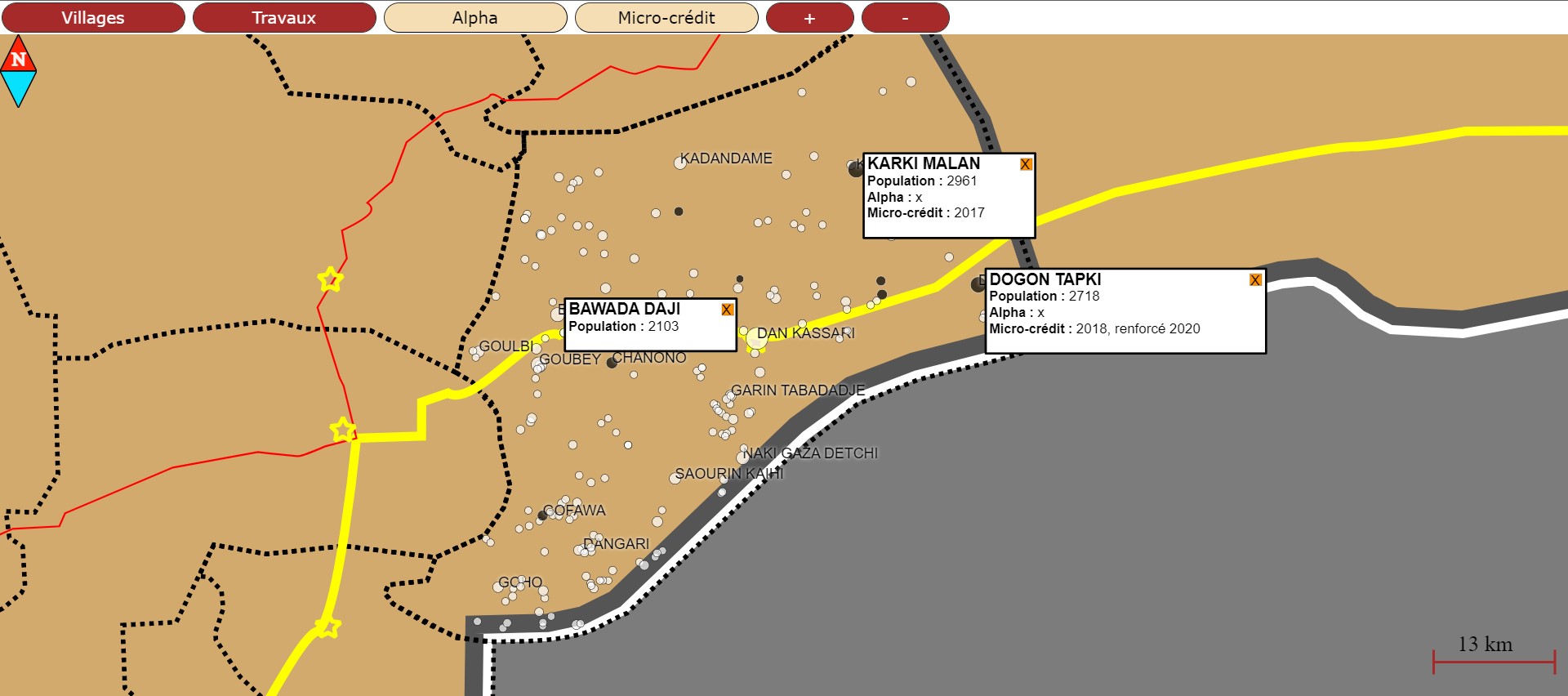
Réalisé en duo, notre projet (qui ressemble finalement plus à un stage…) s’est porté sur l’amélioration d’une application à propos du développement durable. Le but de cette application est de générer une carte interactive de la commune rurale de Dankassari au Niger. Cette carte interactive offre une vue d’ensemble sur les actions de la commune, ce qui permet aux responsables de ces dites actions de mieux orienter leurs décisions.
Exemple de carte générée, limitée 2 activités
À partir de fichiers de données, le programme collecte les informations et les regroupe sur une carte. Il est possible pour l’utilisateur de consulter les activités sur un village en particulier, ou alors de sélectionner une activité en haut de la page ce qui met en évidence dans quels villages cette activité a lieu.
Sur ce semestre de travail, nous avons avons ajouté un certain nombre de fonctionnalités. Tout d’abord, à l’époque il était particulièrement fastidieux de générer les cartes. Voici un exemple de commande qu’il fallait exécuter :
(où Activites.xlsx Population.xlsx sont des fichiers Excel qui comportent toutes les données nécessaires pour chaque village avec leur actions …)
Version en ligne de Cartographier.py
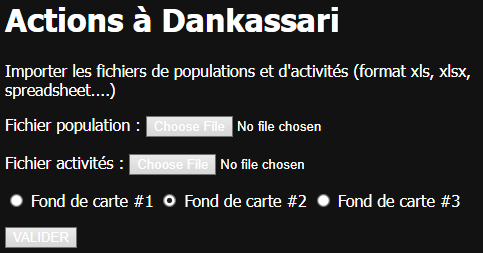
Dans le but de simplifier la génération de cartes interactives, nous avons créé un site web qui permet une utilisation de l’outil plus accessible et intuitive (à condition d’avoir une connexion à internet), ce qui n’est pas le cas lorsqu’on utilise le programme directement sur notre machine.
Page d’accueil pour la génération de carte en ligne avec le choix des fonds de carte
Ce formulaire permet de récupérer les deux fichiers nécessaires à la génération et d’exécuter la commande automatiquement en prenant en compte ces deux documents.
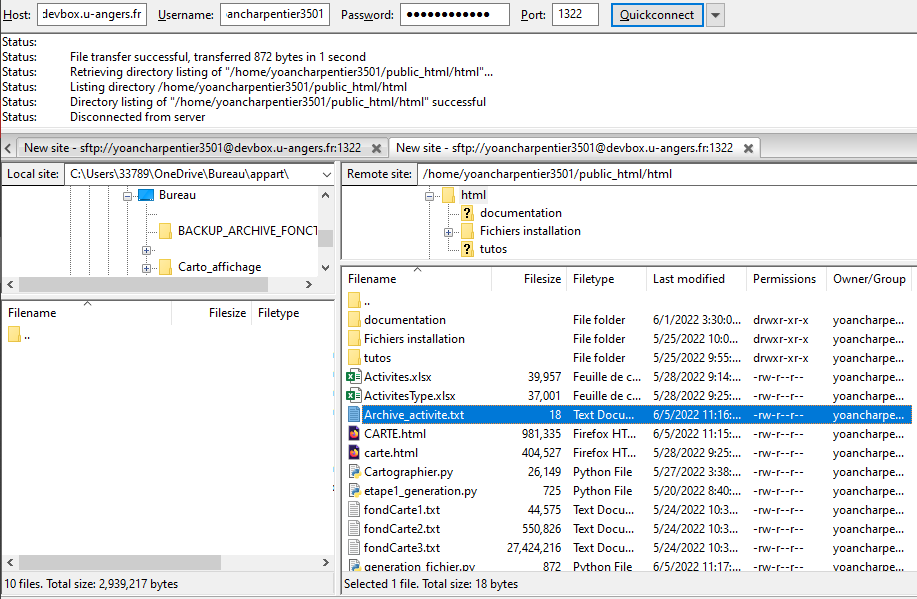
L’élaboration de ce site s’est d’abord fait grâce au logiciel Nginx, qui crée un serveur local sur nos ordinateurs. Cependant, nous avons opté pour l’outil Devbox, développé par Alain Godon. Nous pouvons donc héberger notre site sur un véritable serveur. Ainsi, le développement s’est fait plus facilement, notamment sur la gestion des fichiers en ligne. Gestion des fichiers qui s’est faite avec le logiciel Filezilla :
Logo de Filezilla
Page d’accueil de Filezilla où notre serveur est ouvert
Les fonds de carte
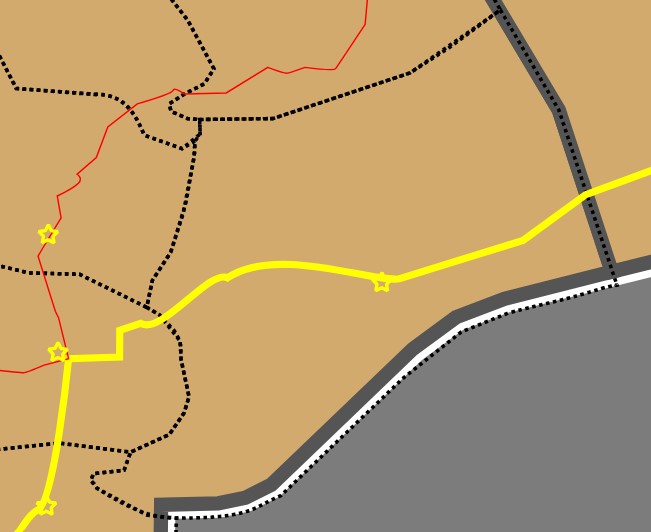
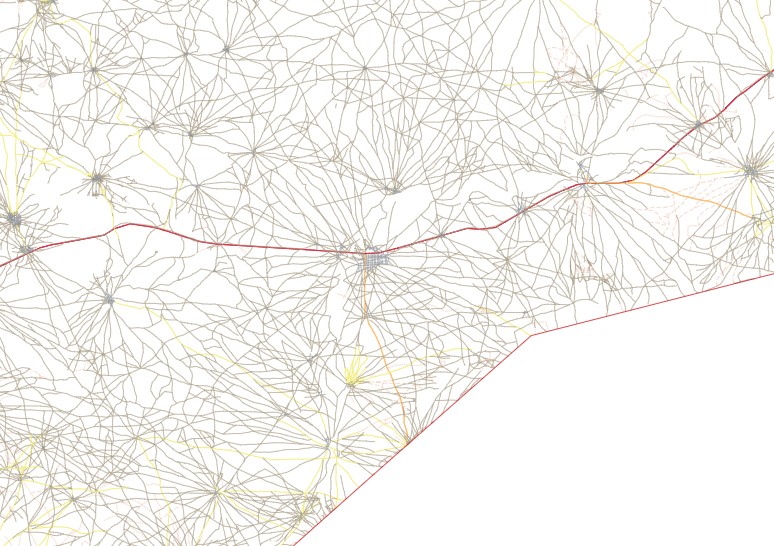
Concernant ces fonds de carte, un travail esthétique a été apporté. En effet, lorsque nous avons commencé à travailler sur le programme, la carte ressemblait à ceci :
Première version du fond de carte
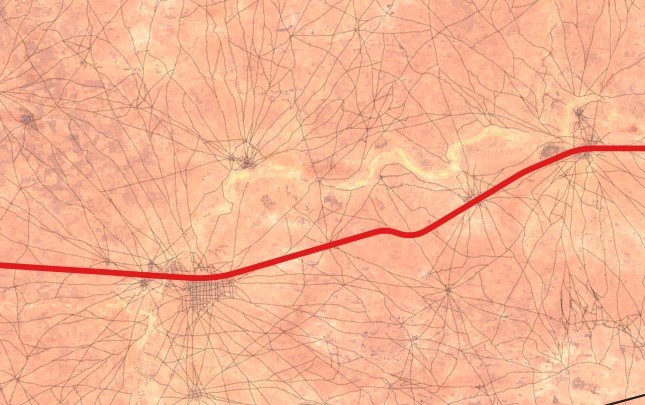
Ce fond de carte permet de visualiser brièvement les frontières des régions du Niger et les routes principales. Or, grâce à Jean-Yves Garinet et CartONG, nous avons pu intégrer deux nouveaux fonds de carte :
Nouveaux fonds de carte
Ces nouveaux fonds de carte permettent de mettre en évidence les pistes de la commune, en dehors des grandes routes, ce qui permet par exemple de contrôler quels villages sont les mieux desservis, et prévoir des itinéraires. Notre dernier fond de carte intègre même une vision satellite du terrain. Finalement, ces ajouts de fonds de carte ne sont pas seulement un ajout esthétique, mais aussi pratique.
De plus, puisque selon notre utilisation, on ne choisira pas les mêmes fonds de carte, nous avons créé une fonctionnalité qui permet à l’utilisateur de choisir quel fond intégrer sur sa carte interactive. La ligne de commande pour générer la carte devient alors :
Cependant, même avec l’ajout de ces nouveaux éléments, le premier fond de carte ne devient heureusement pas obsolète. En effet, même si les pistes ne sont pas consultables sur ce dernier, le premier fond de carte s’avère très utile lorsque l’on veut mettre en évidence les actions plutôt que le terrain.
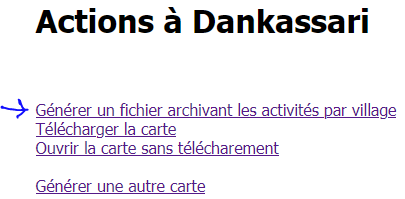
Extraction des activités par village
Nous avons eu comme indication d’ajouter une fonctionnalité qui permet d’extraire les informations d’un village. Cela était déjà possible sur la carte interactive, mais cette fonctionnalité ajoutée doit permettre à l’utilisateur de conserver ces informations en dehors de la carte. Ce qui était jusque là impossible.
Nous avons développé deux versions de cette fonctionnalité : un programme inclus dans la carte interactive, et un autre totalement détaché.
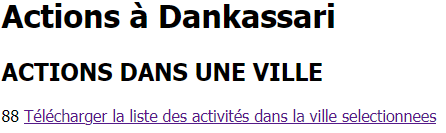
Concernant la fonctionnalité désormais inclue dans la carte interactive, pour extraire les activités d’une ville, l’utilisateur doit cliquer sur le bouton “Affichage”, comme présenté ci-dessous :
Bouton affichage des panneaux d’informations
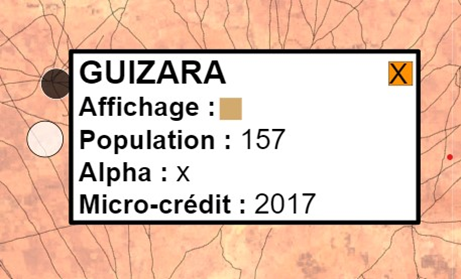
Ce bouton execute un programme JavaScript qui créé une alertbox intégrée au site, contenant toutes les informations necessaires :
Alertbox avec les détails du panneau d’information
Sa particularité est qu’il est possible de copier-coller ces informations pour les conserver dans un éditeur de texte. Nous précisons qu’il était impossible de sélectionner le texte directement sur la carte, le panneau d’information étant une image, voici donc tout l’intérêt de notre fonctionnalité.
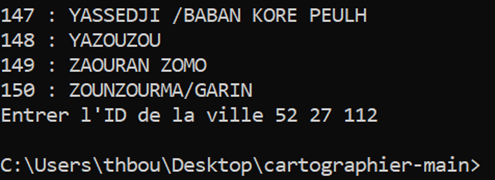
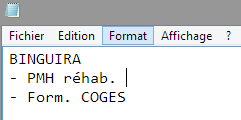
Autrement, concernant la fonctionnalité détachée de la carte, le fonctionnement est différent : l’utilisateur fait appel au programme, celui-ci affiche les villages présents dans le fichier de données qu’il a fourni.
Extraction des activités en dehors de la carte
Il lui est proposé de saisir un ou plusieurs IDs. Ainsi, le programme insère exactement les mêmes données que la version de la carte interactive dans des fichiers texte.
Nous avons mis a disposition ce programme sur notre site, voici comment le programme se présente :
page après génération de la carte
menu déroulant de tous les villages
D’abord, on affiche une liste déroulante des villages afin que le client puisse sélectionner quel village l’intéresse.
Il ne reste qu’à cliquer sur le lien pour obtenir le résultat suivant :
résultat
On fait appel au programme avec l’ID du village correspondant, ce qui génère un document avec un résumé des informations concernant la ville. Enfin, le fichier texte est fourni au client.
Tutoriaux et documentations
Dans un souci de centraliser notre production, nous avons rédigé des documentations techniques et des tutoriaux vidéo, l’intérêt étant de permettre à n’importe qui d’être en mesure d’utiliser notre outil.
XLRD est une bibliothèque de python qui permet d’analyser des feuilles de calcul, ce qui signifie que sans elle, la génération de cartes est impossible. Cependant, son installation se présente assez compliquée, d’où la nécessité d’explications.
Page des documentations incluant : python3, la bibliothèque XLRD et l’utilisation de Cartographier.py
Nous remercions chaleureusement Marie-Françoise Roy, présidente de l’AESCD pour sa confiance dans nos productions et Nicolas Delanoue pour ses précieuses aides d’un point de vue technique ainsi que Jean-Yves Garinet pour les fonds de carte qu’il a créé. Merci également à vous pour votre lecture ! Et nous souhaitons bon courage au futur duo qui prendront en charge ce projet ! (Nous restons à votre disposition en cas de demande particulière sur notre partie de la production)
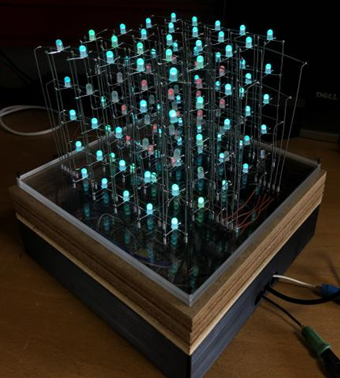
Votre appartement manque de décoration et de couleur ? Nous allons régler votre problème en “seulement” 100 heures ! Incroyable, non ?
Si vous êtes un peu bricoleur et que vous avez bien suivi vos cours de langage C et d’électronique, ce sera du gâteau… Ou pas.
Pour la présentation, on va créer un cube de 5*5*5 leds, mais n’hésiter pas à faire plus grand si vous vous sentez assez courageux (et que vous avez beaucoup, beaucoup de temps devant vous).
Matériel :
Un paquet de 125 leds RGB (prévoyez un peu plus, on n’est jamais à l’abri de dégâts)
Beaucoup de fils conducteurs (préférez des fils rigides pour que la structure soit solide), et des fils plus souples pour câbler les composant entre eux)
Un fer à souder
Des plaques de cuivre pour faire les cartes électroniques
Logiciel Eagle (pour la conception des cartes électroniques)
Une alimentation de 5V
3 registres à décalage (74HC595)
1 transistor darlington (ULQ2003)
75 résistances de 360 ohms (attention, le calcul de résistance change si vous faites un cube plus petit ou plus grand)
31 connecteurs à 5 pins
De quoi faire un socle assez grand pour accueillir les 5 cartes électroniques, l’Arduino et les fils, dans notre nous avons une impression 3D et des plaques de plexiglas
Une machine pour faire les routages des cartes électroniques
Arduino
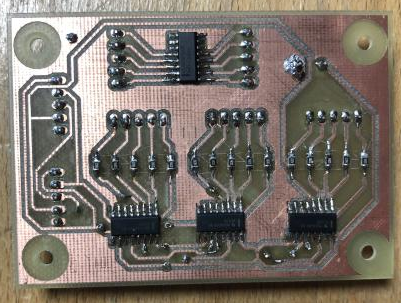
Etape 1 : les cartes électroniques
Commencez par installer le logiciel Eagle sur votre PC. Votre Schéma doit être conçu comme ceci :
Et le board ainsi :
ATTENTION : les chemins rouges sont sur le dessus de la carte et les chemins bleus sur le dessous. Pensez bien à retourner vos cartes électroniques à la fin de l’impression.
Etape 2 : la soudure des cartes électroniques
C’est un travail qui demande un peu de rigueur, privilégiez un étain fin pour avoir de belles soudures. Assurez-vous que tous vos composants sont bien soudés pour éviter de rencontrer des problèmes plus tard. Au bout de la cinquième carte, vous devriez avoir le coup de main !
TOP de la carteBOTTOM de la carte
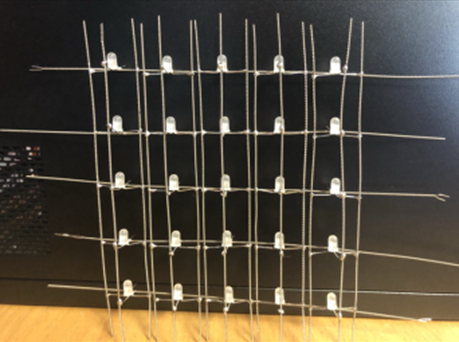
Etape 4 : Réalisation du cube
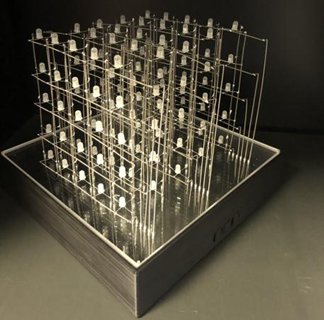
Cette étape est Quasiment composé que de soudure. Le but est d’avoir une structure jolie mais surtout solide. On ne veut pas un cube qui ressemble aux antennes de Tchernobyl comme ci-dessous…
…mais plutôt comme celui-ci
Nos petites astuces :
Torsader les fils
On ne voit pas grand chose mais l’idée est là
Aide au pliage des leds
Aide pour faire les colonnes
Aide pour faire les panneaux
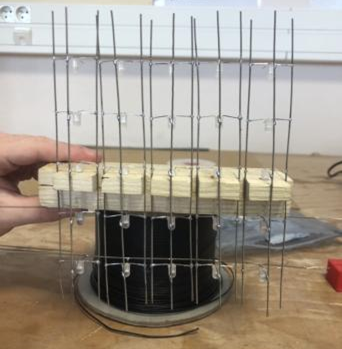
Une fois les 5 panneaux fait, il ne vous reste qu’à les assembler
Etape 5 : Réalisation du socle
On vous conseille de faire une conception assistée par ordinateur si vous avez une imprimante 3D. Sinon, un socle que vous confectionnez vous-même fera tout aussi bien l’affaire.
Prévoyez un socle assez profond pour pouvoir stocker toutes les cartes électroniques et les fils (pas comme nous …).
Etape 6 : Assemblage
Vous allez maintenant faire quelque chose de tout nouveau… SOUDER !
On va relier nos cartes électroniques à notre cube de leds donc il va falloir souder nos connecteurs aux anodes et aux cathodes.
Un connecteur n’est relié qu’à la même couleur, un connecteur par panneau pour les anodes rouges, un par panneau pour les vertes et un par panneau pour les rouges.
Il faut aussi que vous reliiez toutes les cathodes d’un même étage entre elles puis les souder au connecteur pour l’ULQ.
Pour finir, il faut passer à la connectique, il faut faire tous les branchements nécessaires entre les cartes électroniques, le cube de leds, l’Arduino et l’alimentation, de façon à mettre en série les registres à décalage et relier les masses.
Dans notre cas, cela donne ceci :
Etape 7 : Programmation
Nous vous donnons un programme qui vous permettra d’allumer le cube comme vous le souhaitez.
#define latch_pin 2
#define data_pin 11
#define clock_pin 13
//1er panneau
#define etage1 3
#define etage2 5
#define etage3 6
#define etage4 7
#define etage5 8
#define Rouge 2
#define Vert 1
#define Bleu 4
void setup() {
pinMode(latch_pin, OUTPUT);
pinMode(data_pin, OUTPUT);
pinMode(clock_pin, OUTPUT);
pinMode(etage1, OUTPUT);
pinMode(etage2, OUTPUT);
pinMode(etage3, OUTPUT);
pinMode(etage4, OUTPUT);
pinMode(etage5, OUTPUT);
Serial.begin(115200);
digitalWrite(clock_pin, LOW);
digitalWrite(latch_pin, LOW);
digitalWrite(etage1, LOW);
digitalWrite(etage2, LOW);
digitalWrite(etage3, LOW);
digitalWrite(etage4, LOW);
digitalWrite(etage5, LOW);
for (int i = 0; i < 24; i++) {
digitalWrite(data_pin, 0);
digitalWrite(clock_pin, HIGH);
digitalWrite(latch_pin, HIGH);
digitalWrite(clock_pin, LOW);
digitalWrite(latch_pin, LOW);
}
}
void loop() {
long int data = 0x000000;
// 1er etage, vu du haut du cube
int tabcouleur1[25] =
{Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu,
Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu,
Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu,
Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu,
Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu};
// 2e etage
int tabcouleur2[25]=
{Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu,
Vert+Bleu, Rouge, Rouge, Rouge, Vert+Bleu,
Vert+Bleu, Rouge, Rouge, Rouge, Vert+Bleu,
Vert+Bleu, Rouge, Rouge, Rouge, Vert+Bleu,
Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu};
// 3e etage
int tabcouleur3[25]=
{Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu,
Vert+Bleu, Rouge, Rouge, Rouge, Vert+Bleu,
Vert+Bleu, Rouge, Rouge, Rouge, Vert+Bleu,
Vert+Bleu, Rouge, Rouge, Rouge, Vert+Bleu,
Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu};
// 4e etage
int tabcouleur4[25]=
{Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu,
Vert+Bleu, Rouge, Rouge, Rouge, Vert+Bleu,
Vert+Bleu, Rouge, Rouge, Rouge, Vert+Bleu,
Vert+Bleu, Rouge, Rouge, Rouge, Vert+Bleu,
Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu};
// 5e etage
int tabcouleur5[25]=
{Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu,
Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu,
Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu,
Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu,
Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu, Vert+Bleu};
pushetage(tabcouleur1,etage1,5,5);
pushetage(tabcouleur2,etage2,5,5);
pushetage(tabcouleur3,etage3,5,5);
pushetage(tabcouleur4,etage4,5,5);
pushetage(tabcouleur5,etage5,5,5);
}
long int ligne (const int*couleur, int nb) // couleur : la 1ère ligne de tabcouleur
// nb : le nombre d'élement d'une ligne de tabcouleur
{
long int data_l = 0; // variable où sera stocké le mot
for (int i = 0; i < nb; i++) // on parcourt couleur
{
for (int j = 0 ; j < 3; j++)
{
if (couleur [i] & (1 << j))
{
data_l = data_l | (1 << (nb - i -1 + j * nb));
}
}
}
return data_l; // retourne le mot pour l'utiliser dans la loop avec la fonction push
}
void push(long int data, int datalen) // data : le mot envoyé
// n : la ligne à allumé
// datalen : le nb de led par ligne
{
datalen = datalen * 3 ; // taille de notre mot envoyé 5*3
for (int i = 0; i < datalen; i++) //0<i<4 : bleu, 6<i<10 : vert,12<i<16 :rouge
{
digitalWrite(data_pin, (data & 0x01)); //écrit la valeur data dans la sortie data_pin
digitalWrite(clock_pin, HIGH);
digitalWrite(latch_pin, HIGH);
digitalWrite(clock_pin, LOW); //on fait alterner la clock et le latch entre 0 et 5V
digitalWrite(latch_pin, LOW);
data = data >> 1; // à chaque coup d'horloge le mot data se décale de 1
}
}
void pushetage(const int*tabcouleur, int etage, int range, int nbledparrange){ // etage : l'étage à allumer
// range : le numéro de rangé/ligne de couleur dans le tableau
// nbledparrange : le nombre de led sur chaque rangé
long int data;
for (int i = 0; i < range; i++) //on parcourt chaque rangé
{
data = ligne(tabcouleur+nbledparrange*i, nbledparrange); //...+nbledparrange*i pour prendre la bonne rangé
// transforme la ligne de tabcouleur en data
push(data,nbledparrange); //envoie de data dans un étage
}
digitalWrite(etage, HIGH);
delay(1);
digitalWrite(etage, LOW);
}
Il vous suffit de changer les matrices de couleurs pour correspondre à vos envies ! Et surtout, vous pouvez, vous amusez à changer le programme pour des designs plus complexe.
Nous sommes Samy et Estelle, deux étudiants en deuxième année du cycle préparatoire de Polytech Angers. Dans cet article, nous allons vous présenter notre projet de fin d’année concernant l’autoconsommation photovoltaïque encadré par notre tuteur Hassan Bouljroufi.
Installation de notre système photovoltaïque devant Polytech
Contexte :
De nos jours, en réponse à notre style de vie énergivore, il est essentiel de faire évoluer nos habitudes de consommation et notamment celle de l’énergie électrique. C’est donc autour de cette thématique que nous avons mis en place notre projet.
Objectifs :
Les objectifs de notre rapport étaient :
de comprendre le fonctionnement de l’énergie photovoltaïque ;
d’en savoir plus sur la production et la consommation de sa propre électricité ;
d’en savoir plus sur la législation et les démarches administratives à suivre lors d’un projet d’autoconsommation ;
de réaliser une installation électrique fonctionnelle en toute sécurité.
L’autoconsommation, qu’est-ce que c’est ?
Pour faire simple, l’autoconsommation est le fait de produire soi-même l’énergie électrique que l’on consomme au quotidien. Nous avons donc décidé de découvrir comment produire de l’électricité nous-mêmes, en réalisant une installation à l’aide d’un panneau photovoltaïque, un micro-onduleur, un relais, un disjoncteur différentiel et un disjoncteur divisionnaire.
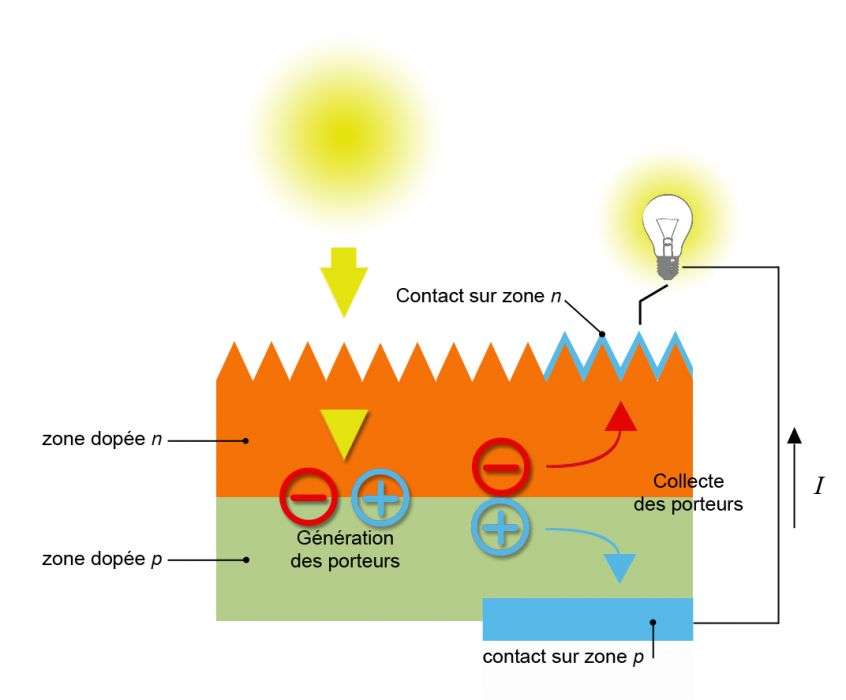
Le panneau est en partie constitué de cristaux de silicium (un semi-conducteur) qui ont été au préalable dopés, c’est-à-dire qu’on leur a injecté des atomes particuliers pour charger une couche du panneau négativement (électrons en excédent), et une autre couche positivement (électrons en déficit). Le soleil émet des photons qui transportent de l’énergie. En traversant la cellule photovoltaïque, l’énergie de ces photons va être absorbée par les électrons, les excitant, et provoquant alors le déplacement d’électrons des deux couches négative et positive. Cela crée ainsi un courant.
Le courant produit est un courant continu, mais pour pouvoir être consommé, il faut un courant alternatif. C’est le rôle que joue le micro-onduleur. En effet, grâce à des dipôles que l’on ouvre et ferme de manière alternative, celui-ci convertit le courant continu en courant alternatif.
Les disjoncteurs et le relais sont utilisés pour la sécurité de l’installation. Le relais était nécessaire à cause du micro-onduleur que l’on a choisi, celui-ci a pour fonction de déconnecter les micro-onduleurs et d’interrompre la production d’électricité du panneau photovoltaïque en cas de coupure du réseau.
Le rôle des disjoncteurs est de protéger les biens et les personnes des risques d’électrisation / électrocution, en surveillant en permanence le courant qui entre et qui sort : s’il y a une différence entre les deux, il coupe le passage du courant pour mettre l’installation en sécurité.
Réalisation du projet :
1- Sécurité
Avant de réaliser le montage, nous avons dû nous informer sur les différentes normes de sécurité liées à l’électricité.
Parmi elles :
–Norme NF C 15-100 : norme nationale, qui définit des règles de conception, de mise en oeuvre et d’entretien pour des installations électriques basse tension (tension alternative qui ne dépasse pas 1000V, ex : habitations, ateliers ou petites industries)
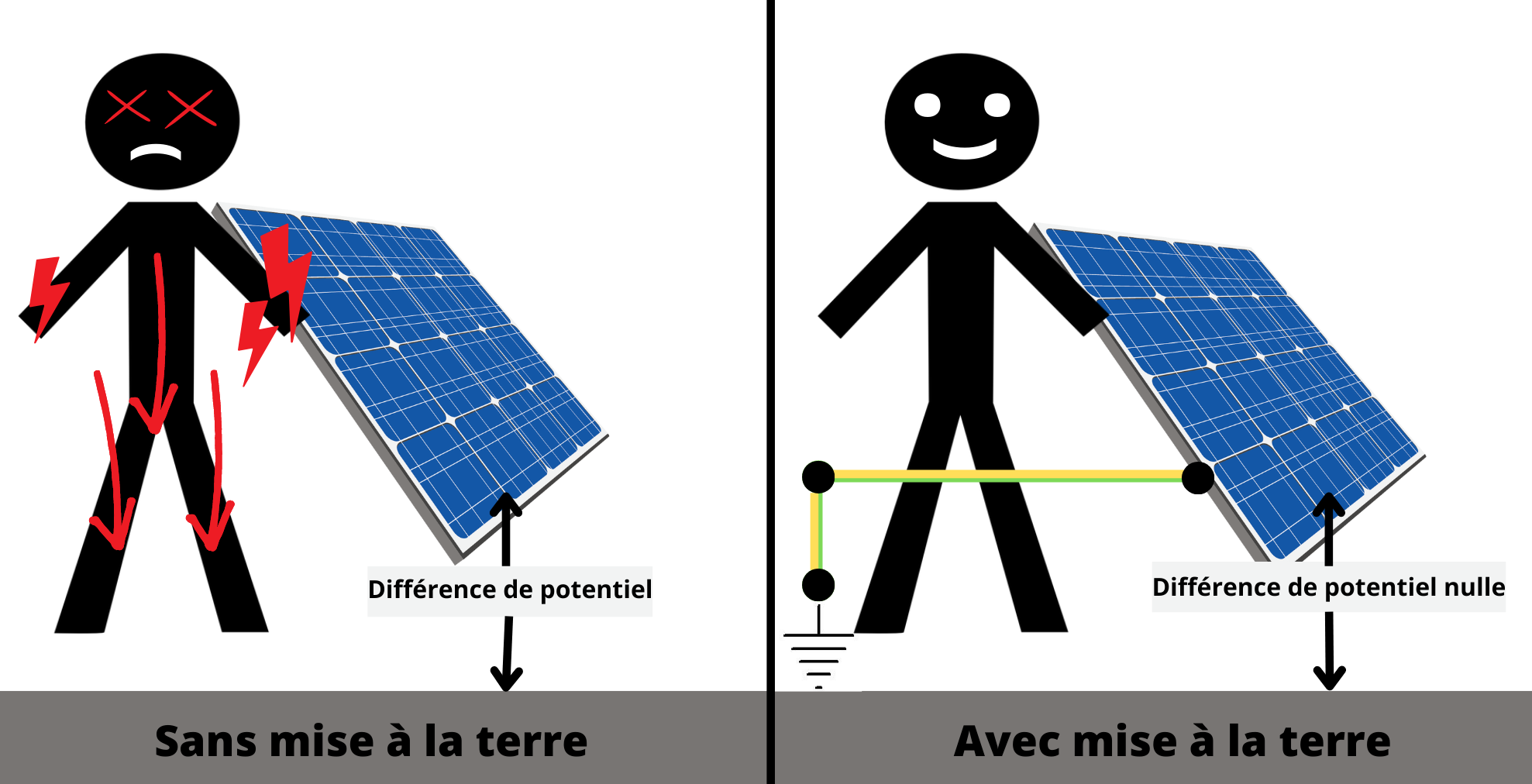
D’après cette norme, nous devions obligatoirement réaliser la mise à la terrede notre installation.
Schéma du principe de mise à la terre
Lorsqu’il y a une fuite de courant sur un appareil électrique et qu’un élément conducteur comme notre corps touche l’appareil, l’électricité va s’échapper vers le sol en passant par notre corps et donc nous électrocuter. Cependant, le fait de lier un composant à la terre permet de renvoyer le courant dans la terre et d’envoyer l’information au tableau électrique, qui va activer les différents disjoncteurs.
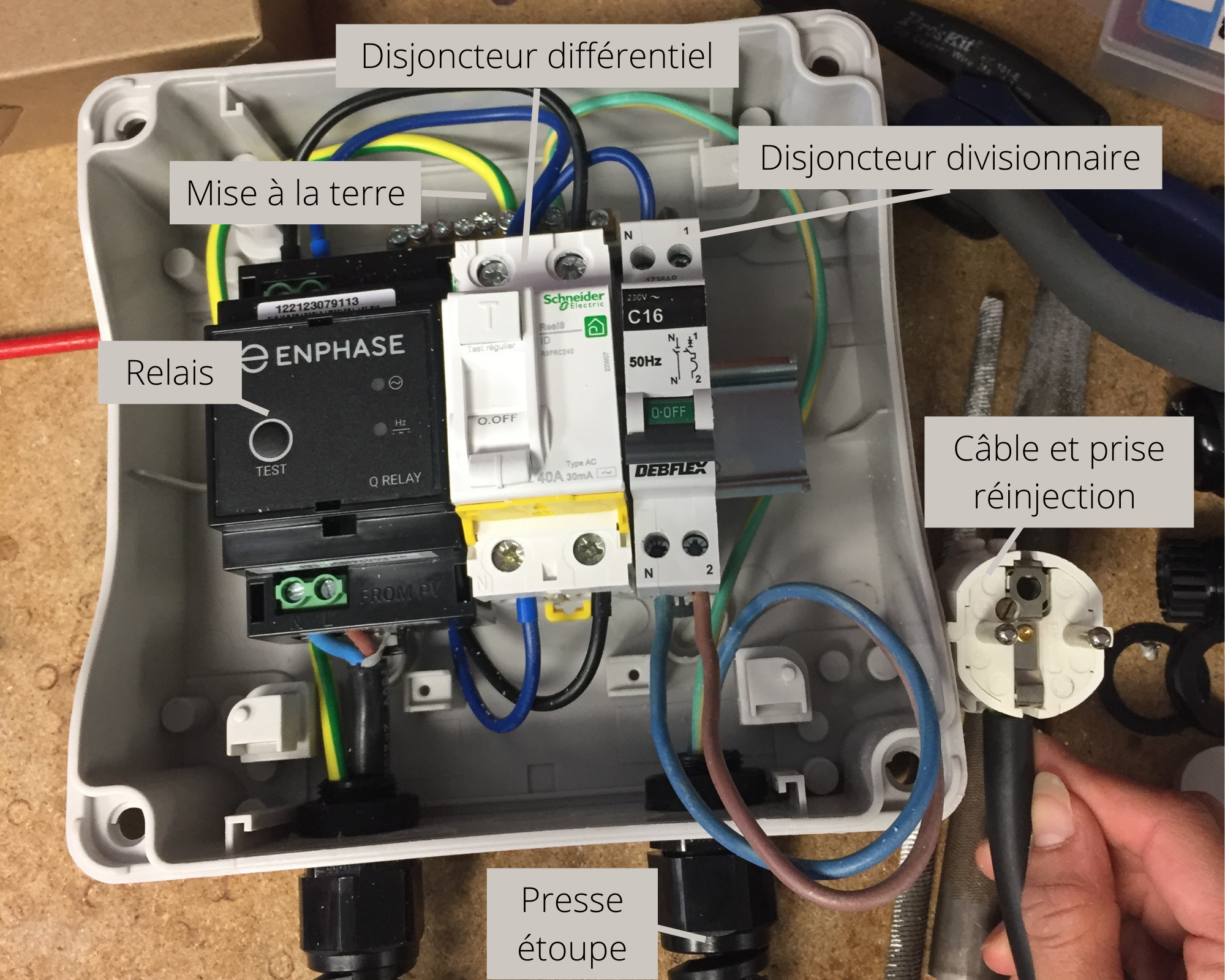
–Tableau électrique :
Pour que la mise à la terre du tableau soit efficace, nous l’avons reliée à notre tableau. Dans ce tableau, nous avons dû installer un disjoncteur différentiel et un disjoncteur divisionnaire, un relais (essentiel pour notre micro-onduleur), un câble et une prise de réinjection dans le réseau.
Tableau électrique
2- Montage
-Mettre le panneau à la terre à l’aide d’une cosse à œillet
Pour ce faire, il faut mettre le bout du fil de la terre à l’arrière de la cosse jusqu’à ce que la gaine atteigne le bout de la cosse (métallique donc conducteur). Pour que le fil tienne dans la cosse, nous avons, à l’aide de notre tuteur, procédé à un étamage du fil afin qu’il soit plus épais. Une fois que le fil tenait bien dans la cosse, il fallait lier la cosse au panneau.
– Surveiller la fiabilité de la mise en terre (test de continuité sur le cadre du panneau)
Il y avait un trou dans le cadre du panneau destiné à la mise à la terre, nous avons donc rentré une vis dans l’œillet de la cosse et dans le trou de terre, et nous l’avons fixée avec un écrou. Nous avons alors effectué un test de continuité à l’aide d’un multimètre pour vérifier que le fil n’était pas coupé, et que le courant passait bien dedans.
Test de continuité
-Relier le micro-onduleur aux prises mâle et femelle du panneau
-Surveiller les voyants
-Brancher le câble de réinjection
-Allumer le relais
-Surveiller le voltage et le courant à l’aide d’une pince ampère-métrique
Bilan :
Le panneau a finalement produit un courant d’environ 0.74A sous une tension alternative de 240V. Cela reste minime mais notre expérience avait pour principal objectif de contrôler la mise en place du panneau et de vérifier si les branchements étaient corrects pour permettre une production de courant en toute sécurité ; on aurait sans doute obtenu de meilleurs résultats si notre panneau était mieux incliné et qu’il y avait plus de soleil au moment d’effectuer le test.
Pour aller plus loin
Si le sujet vous intéresse davantage, voici le lien vers notre rapport détaillé :
Nous tenons à remercier M.Hassan BOULJROUFI, notre tuteur, qui nous a suivi tout au long de cette période de projet en nous conseillant sur les différentes démarches à suivre et en nous apportant son savoir et son savoir-faire. Par ailleurs, nous remercions également 123Elec et Leroy Merlin pour le service qu’ils nous ont fourni pour permettre la mise en forme de ce projet.
Enfin, nous remercions Polytech Angers pour nous avoir permis de réaliser ce projet.
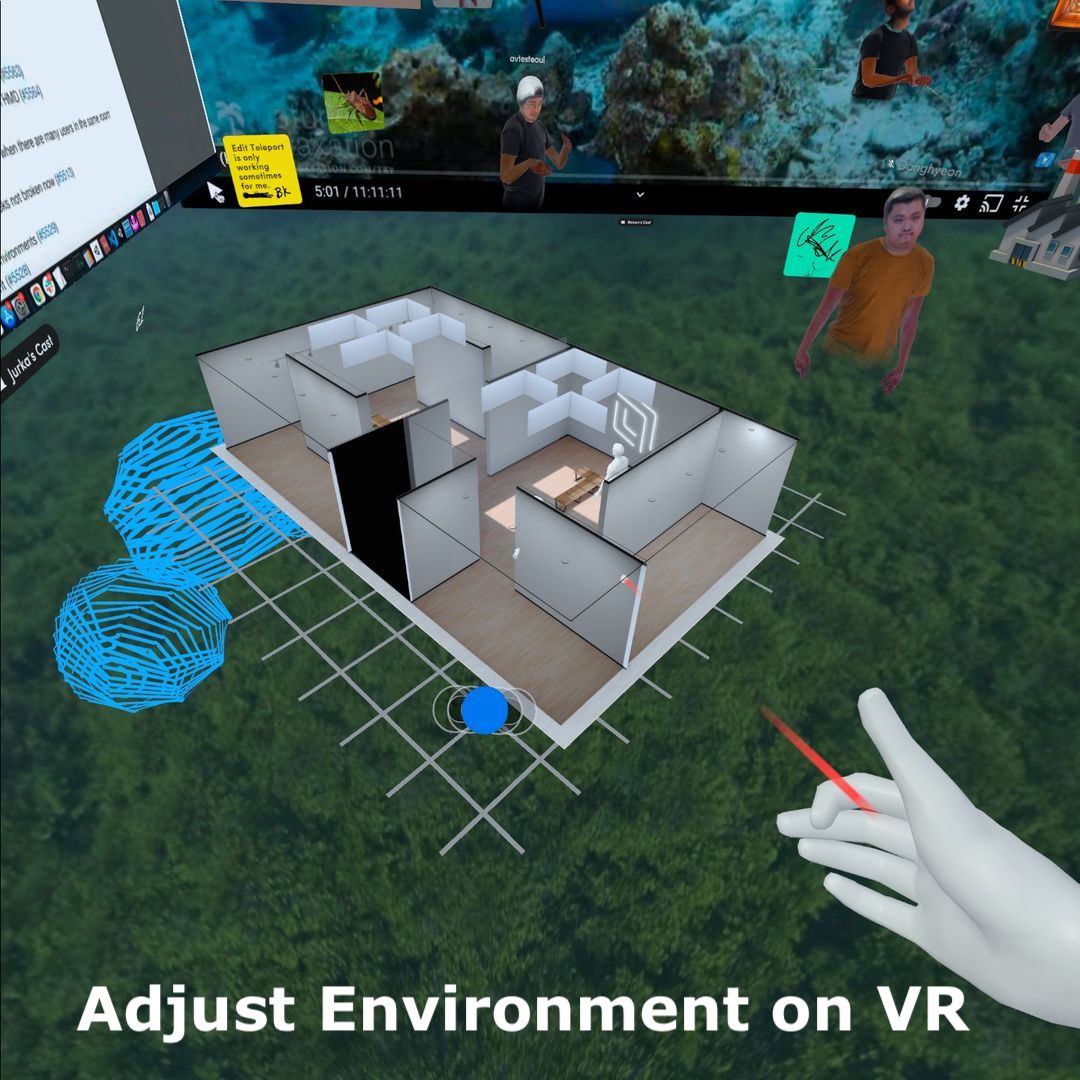
Bonjour, nous sommes deux étudiants de deuxième année du cycle préparatoire à Polytech Angers, Valentin BONNET et Théo PREMARTIN. Dans cet article, nous vous présenterons notre projet de PEIP2 et espérons que cela vous donnera envie de vous intéresser à la VR !
Présentation du Projet :
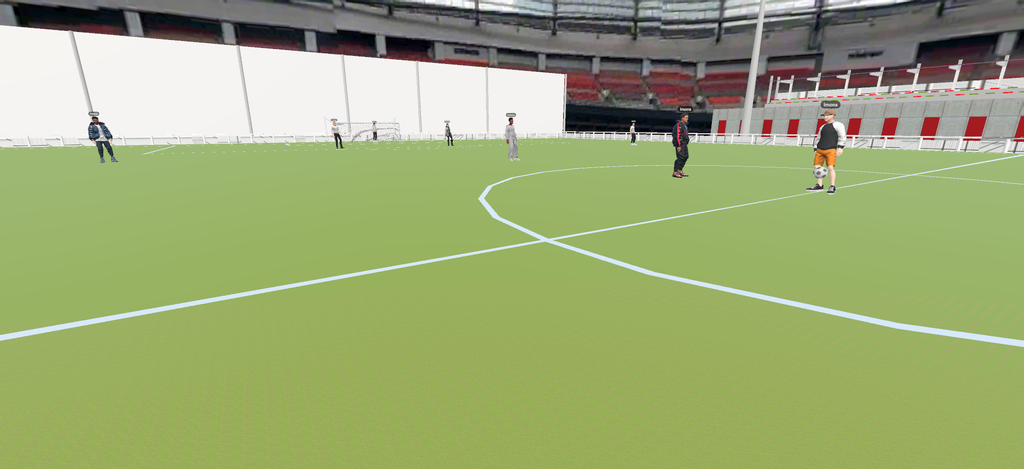
L’objectif de ce projet est de concevoir un habitat partagé pour jeunes adultes atteints de trouble du spectre autistique. La particularité est qu’il doit être conçu en Réalité Virtuelle, à l’aide du logiciel Spacial.io, afin que les futurs résidants puissent s’accoutumer avec les lieux. En effet pour les personnes atteints d’autisme cela est extrêmement perturbant de changer de lieu de vie et d’habitudes. C’est pour cela que nous utilisons la VR, en effet des études scientifiques ont montrées que c’était un parfait outil pour les personnes autistes.
Pour réaliser ce projet, nous étions en collaboration avec des étudiants de l’Ecole de Design de Nantes et avec le personnel de l’IME la Marzelle formant l’association La Résidence Sociale 49 (RS49).
Présentation du logiciel utilisé, Spacial.io :
Tout d’abord une petite vidéo que nous avons réalisé qui vous immergera dans l’univers de la VR et l’outil Spacial.io :
Spacial.io est un logiciel créé par Google pour vivre des moments interactifs à distance. Une sorte de Teams du futur permettant de par exemple faire des réunions à distance de manière beaucoup plus interactive. Ce logiciel est le commencement de ce qu’on appelle Métavers.
En effet, il permet de créer nos propre environnement, c’est ce qui nous intéresse ici pour ce projet.
Travaux réalisés :
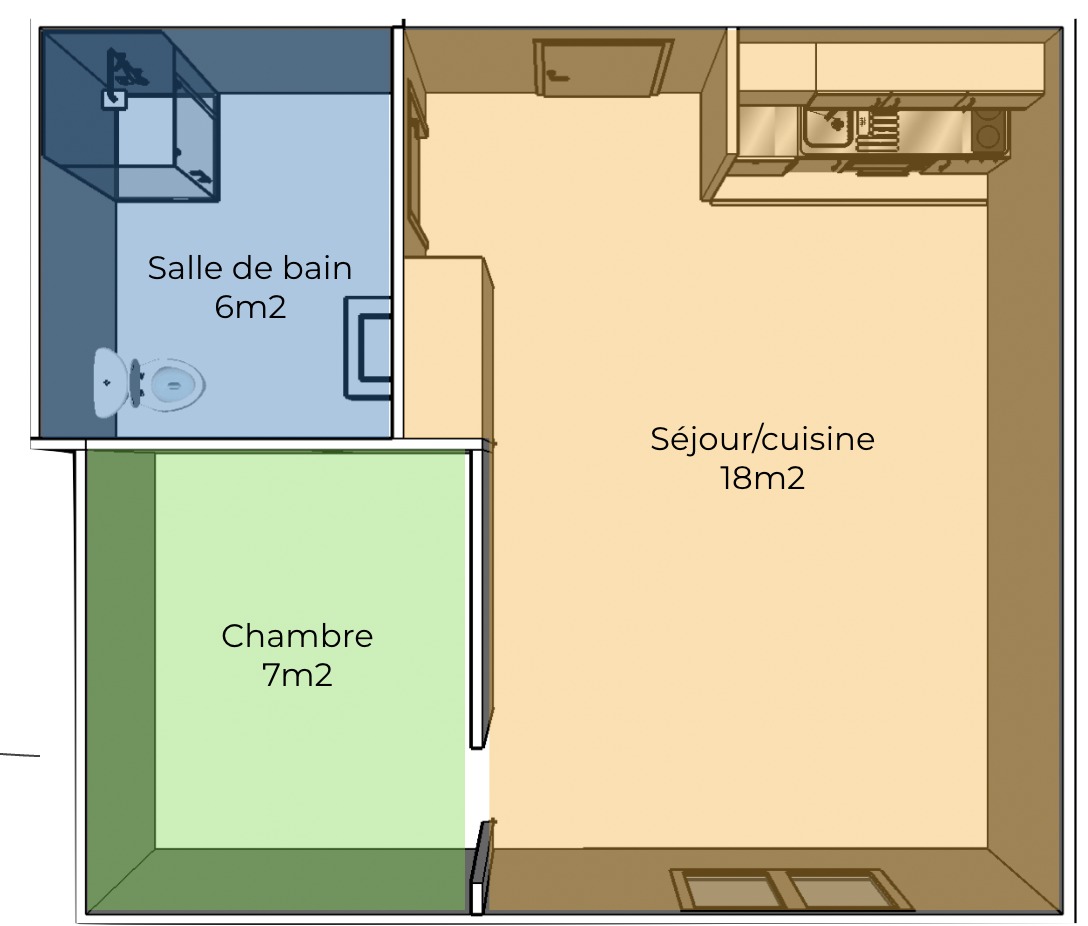
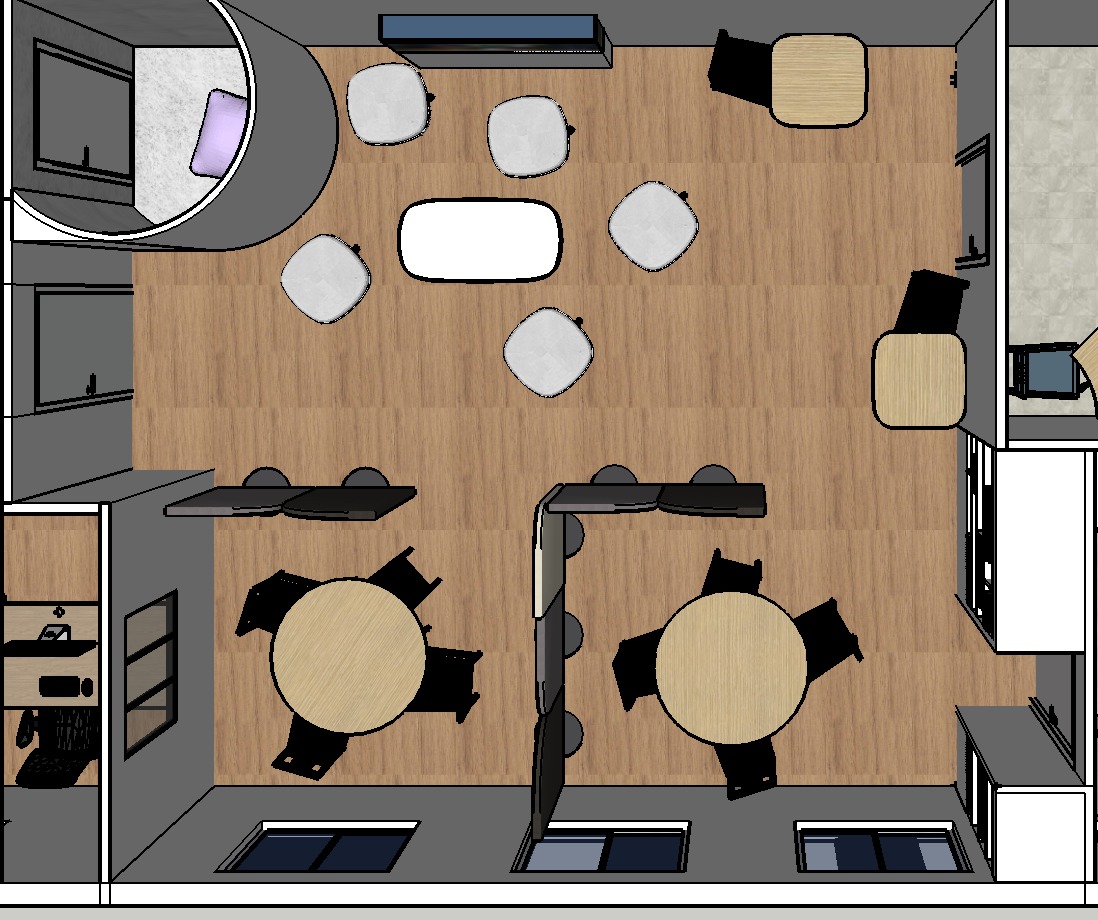
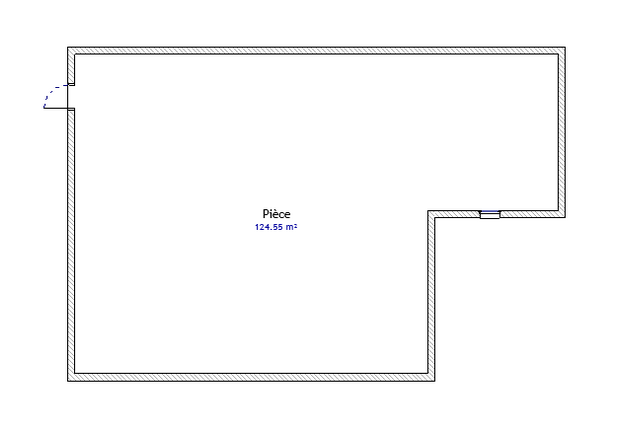
Après avoir rencontré l’ensemble des collaborateurs et pris connaissance de leurs attentes, nous avons, avec les élèves de l’école de design de Nantes, conçu les plans du futur habitat partagé. Nous devions concevoir un ensemble de pièces communes et des petits appartements individuels de 31 m². Tout cela en faisant en sorte que l’habitat soit adapté pour des personnes atteintes d’autisme, c’est pourquoi les réunions en amont avec les personnels de l’IME de la Marzelle furent primordiales.
Plan d’un appartement individuel de 31 m².Exemples de plans de pièces communes.Plan 3D complet du futur habitat.
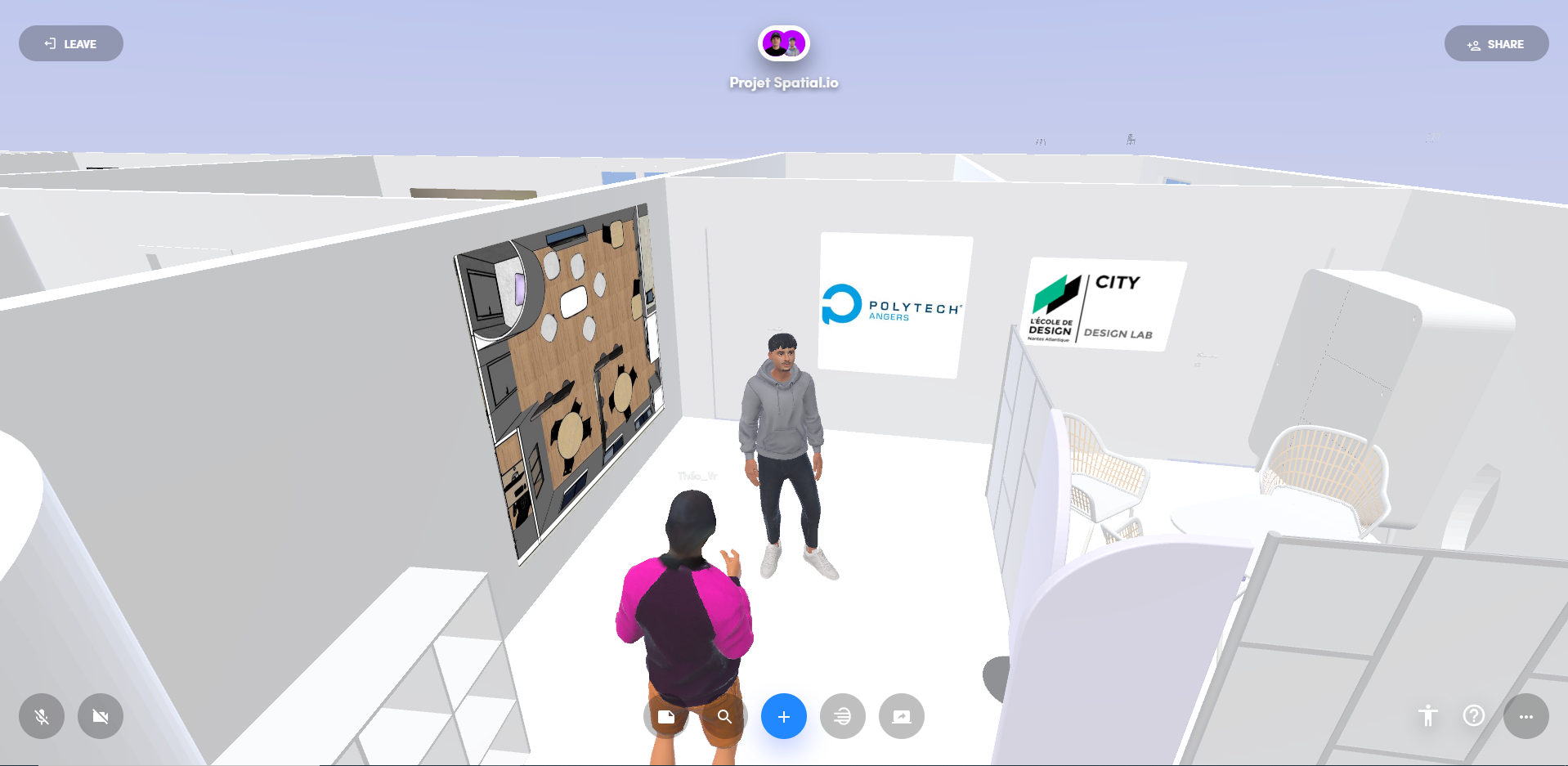
Une fois tous les plans 3D créés, nous les avons importé l’ensemble des murs puis les meubles sur spacial.io. Nous avons ensuite placé un à un tous ces objets 3D dans la VR afin que nous puissions nous déplacer à l’intérieur et découvrir l’habitat de manière immersive.
Bilan du projet :
Les points positifs du projet :
Projet collaboratif : Ce projet s’effectue avec des collaborateurs qui ne sont pas forcément des ingénieurs. Cela oblige à adapter son discours pour être clair et compris par les autres lorsque l’on parle d’un sujet technique. Cela nous sera très utile dans notre futur monde professionnel.
Projet utile : Ce projet vise directement à aider des personnes en situation de handicap, on se sent donc utile, investi et motivé dans la réalisation de leurs futurs lieux de vie.
Découverte de la VR : En pleine expansion, c’était pour autant notre première expérience avec la VR. Nous avons découvert une technologie très prometteuse que ce soit dans des domaines du divertissement, mais aussi bien comme ici pour des projets sociaux / médicaux.
Orientation : Nous sommes en effet tous les deux de futurs élèves de la spé SAGI à Polytech Angers, qui contient une spécialisation Réalité Virtuelle. Cela nous a donc fait une découverte et permis de peu être la choisir en 5e année.
Conclusion :
Pour conclure, ce projet nous a énormément plus, nous avons appris beaucoup de chose, rencontré de nombreuses personnes et cela a été très enrichissant. C’est pourquoi, si vous êtes actuellement en PEIP 1/2 et que vous regardez cet article pour vous aider à choisir un projet, nous vous recommandons, s’il est encore proposé, de choisir le projet Spacial.io !
Nous sommes un groupe de 3 étudiants de deuxième année à Polytech Angers. Lors de cette deuxième année d’étude, nous avons eu le loisir de faire des projets tutorés. C’est-à-dire que l’on nous a proposé une cinquantaine de projets et nous en avons choisi un selon nos envies. Pour notre part, nous aimons particulièrement la Conception Assisté par Ordinateur (modélisation 3D ou CAO) et c’est pourquoi nous avons choisi de fabriquer un lanceur de ficelle, le nom n’est pas très attractif mais le contenu du projet l’est bien plus!
II. Qu’est-ce que ce projet et pourquoi ce choix
Le projet lanceur de ficelle est plus connu sous le nom du produit ZipString. L’objet est très simple, il s’agit d’un objet composé d’un manche et d’une tête équipée de deux moteurs avec des roues entraînant une ficelle continuellement pour former un effet de gravité complètement dingue. Le concept a été popularisé lors du confinement 2020 et beaucoup de vidéos circulent sur les réseaux sociaux telles que celle du youtubeur DR.Nozman. (https://www.youtube.com/watch?v=QE-88-wlYa0) .
Nous avons choisi ce projet car comme indiqué précédemment nous adorons la CAO mais surtout nous avions déjà entendu parler du ZipString. Même si sur la forme cela paraît un objet simple, les caractéristiques techniques entourant cet objet sont plus complexes. Pour le fabriquer nous avons dû passer par deux phases que l’on vous présente maintenant!
III. La recherche des composants et la conception 3D
Avant de commencer la conception, nous avons recherché et commandé tous les produits nécessaires au fonctionnement du ZipString: un interrupteur, des piles, des supports de piles et des moteurs. Il faut savoir que Polytech à des partenariats avec plusieurs enseignes fournissant du matériel technique comme Conrad qui fut l’un de nos principaux fournisseurs.
Page web de Conrad
Enfin après avoir choisi les composants techniques, nous avons pu nous consacrer à notre “loisir”: la CAO. Cette partie consistait à réaliser le bâti (le boîtier) du lanceur ainsi que les roues. Il fallait avoir les bonnes mesures pour que tout rentre parfaitement. Bien sûr, un point que nous ne voulions pas négliger était le design. Pour réaliser le ZipString, nous avons utilisé le logiciel Onshape et non SolidWorks. Il permet de réaliser en collaboration et en ligne des modèles 3D (c’est comme utiliser google doc pour le traitement de texte collaboratif).
IV. Impression 3D et les tests
Lorsque l’on avait fini la conception, nous changions de décor pour aller au Fablab’ (un endroit de Polytech où il y a un atelier avec des machines comme des imprimantes 3D) afin d’imprimer nos créations en 3D. C’est le moment le plus satisfaisant de la conception, voir son chef-d’œuvre en physique. Lorsque l’on crée une pièce en 3D, il est toujours agréable de l’observer pendant un certain temps pour voir les finitions faîtes sur l’ordinateur.
Imprimante 3D – Fablab’ de Polytech
Les tests se résument dans notre cas à vérifier si les composants s’encastrent bien dans le bâti fabriqué puis de regarder si les moteurs sont bien alimentés et puissants. Enfin voir si le lanceur de ficelle fonctionne. Ces trois étapes paraissent simples mais elles nous ont plusieurs fois fait revenir à la case départ: chercher de nouveaux composants et refaire de la CAO.
Mais les échecs ne sont écœurants que sur une courte durée. Généralement les idées fusent et le projet est relancé avec plus d’entrain!
V. Quels problèmes rencontrés
Bien sûr les problèmes ont été nombreux! Après notre première impression, nous nous sommes familiarisés avec l’impression 3D. Sur notre premier boîtier, les défauts ne se comptaient pas: les composants ne rentraient pas tous et certaines finitions n’étaient vraiment pas bonnes. Seule solution, revoir toute la CAO en conséquence.
Ensuite nous avons découvert que nos premiers moteurs demandaient une trop grosse tension (12V en tension nominale) et donc ils ne tournaient pas à la vitesse désirée pour entraîner la ficelle. Mettre deux piles 9V n’étaient pas adaptés au bâti donc pour résoudre ce problème, nous avons cherché des moteurs avec une tension nominale minimale de 3V pour une alimentation avec deux ou trois piles AAA.
Enfin, le type de ficelle a été le problème final. Nous avons testé des fils plastiques, des ficelles de cuisine ou bien des ficelles en laine. La solution était de continuer à chercher d’autres types de ficelles jusqu’à trouver la bonne. C’est en testant la ficelle en coton que nous avons eu le meilleur résultat.
Bien sûr nous avons eu plein de petits problèmes intermédiaires mais résolus très facilement.
Lanceur de Ficelle final
Conclusion
Ce projet par ses problèmes et ses solutions fut instructif. Ce fut une réelle aventure où nos terrains de jeux se divisaient entre FabLab’ et salle informatique avec comme guide le professeur attaché au projet: M.VERRON. Les moments les plus incroyables furent lorsque les tests étaient concluants et que nous pouvions aller de l’avant. Ce fut l’un des travaux où la collaboration et la bonne humeur étaient des clés majeures pour la réussite.
Nous sommes un groupe de trois étudiants à Polytech Angers, Valentine Loeul, Nathan Colliou et Louise Garnier. Nous nous intéressons tous les trois au milieu du génie civil et souhaitons nous orienter dans ce domaine l’année prochaine.
Soit, mais quel est notre projet ?
Nous avons pour projet de renforcer un mur en maçonneries, de manière à ce qu’il soit résistant aux effets sismiques. En définitive, nous devions trouver la méthode de renforcement la plus adéquate et la plus performante, puis modéliser ce mur renforcé à l’aide du logiciel Revit.
Quel est l’intérêt de notre projet ?
Lors d’un séisme, les conséquences peuvent être très dangereuses, voire même vitales. En effet, les dégâts causés par un séisme sont listés en cinq degrés. Ces cinq degrés vont de l’absence de dégâts liés au bâtiment en lui-même (dommages légers sur les objets extérieurs), à l’effondrement total ou presque du bâtiment, pouvant avoir des répercussions sur les vies humaines.
C’est pour cela qu’existent en France des normes parasismiques, que doivent respecter les maîtres d’œuvre dans leurs constructions.
D’accord, mais quels résultats avons-nous obtenu ?
Notre projet était composé de deux parties : une partie de recherches sur les différentes méthodes de renforcement existantes ; et une seconde sur la modélisation de ce mur renforcé à l’aide du logiciel Revit.
Comment avons nous organisé nos recherches ?
Nous avons tout d’abord essayé de comprendre les différentes méthodes de renforcement.
Pour cela, nous nous sommes documentés sur les sujets suivants :
les maçonneries ;
les séismes ;
le comportement mécanique d’un mur ;
la réglementation ;
ou encore sur les différentes méthodes de renforcement.
Ces recherches nous ont permis de préciser le type de mur que nous voulions renforcer : nous avons donc conclu que nous renforcerons un mur porteur, puisqu’il permet d’assurer l’unicité du bâtiment, et donc la sécurité en cas de séisme. Ce mur aura une épaisseur de 15cm et une hauteur standard de 215cm.
Ce mur doit pouvoir supporter les mouvements désordonnés du sol (énergie cinétique créant des forces de cisaillement), ainsi que la force des ondes sismiques (énergie stockée et dissipée par le mur), tout en continuant d’assurer sa fonction principale qui est d’assurer les efforts normaux liés à la descente de charge (masse des planchers, toiture, charges d’exploitation, etc.).
La méthode de renforcement de notre mur doit aussi respecter l’EuroCode, et donc s’adapter au milieu dans lequel il est implanté, ainsi qu’au type de bâtiment dont il fait partie. On prendra donc en compte les risques sismiques, les facteurs météorologiques tels que la neige et le vent par exemple, le type de sol, l’utilité du bâtiment, etc.
Voici les différentes méthodes de renforcement que nous avons trouvé énumérées ci-dessous :
modification des contreventements ;
chemisage en béton armé ;
chaînages horizontaux et verticaux ;
injection de résine ;
injection de polymères renforcés de fibres ;
contreforts.
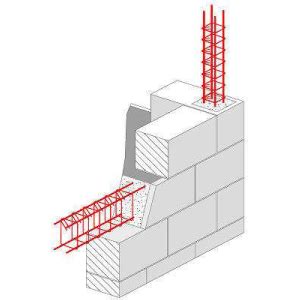
Nous avons étudié les avantages et inconvénients de chaque méthode, puis nous avons choisi de nous concentrer sur les chaînages horizontaux et verticaux. Cette technique est très répandue, peu coûteuse et simple à mettre en place.
Schéma de chaînages
Comment s’est passée la modélisation du mur ?
Au départ, nous avons étudié le fonctionnement du logiciel de conception de bâtiments Revit. Celui-ci permet de créer un modèle en 3D d’une structure pour créer divers documents nécessaires à sa construction.
A vrai dire, la modélisation à pris plus de temps que nous le pensions : nous avons eu beaucoup de mal à comprendre comment renforcer la structure grâce au logiciel.
Le logiciel nous a permis de combiner les charges et d’appliquer des contraintes sismiques. Il devait également nous permettre de modéliser la descente de charges, mais n’ayant pas accès à la dernière licence, nous n’avons pas pu utiliser cette fonctionnalité.
Revit
Au final, sur quoi notre projet a abouti ?
Pour conclure, ce projet a été très constructif.
Tout d’abord, ce travail de groupe en autonomie nous a permis d’apprendre comment nous organiser de manière efficace, ou encore comment simplifier des notions complexes. Les divers problèmes que nous avons rencontrés nous ont permis d’apprendre à nous adapter.
De plus, nous avons pu mettre en pratique nos cours de Propriétés et Résistance des Matériaux.
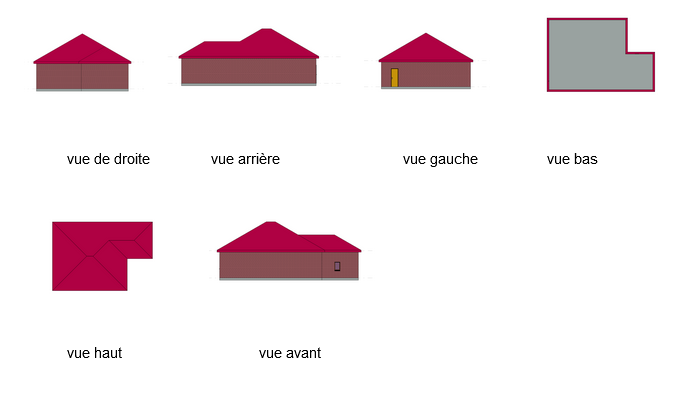
Puis, notre projet a surtout abouti à la modélisation d’un bâtiment, dont vous pouvez voir les différentes vues et plans ci-dessous :
Différentes vues extérieures
Plan du bâtiment
D’autre part, nous avons rédigé un rapport, que nous avons mis ci-dessous :
Au terme de ce travail, nous tenons à exprimer nos remerciements pour les personnes qui ont contribué à sa réalisation, et tout particulièrement à notre tutrice de projet, Mme. Stéphanie Chahine, pour son aide, ses conseils et ses directives, ayant permis le bon déroulement de notre projet tutoré.
Nous contacter
Une question ? Contactez-nous, nous vous répondrons !
Nous nous appelons Jonathan Blandin et Soren Combalot et nous allons vous exposer nos avancées et les résultats trouvés concernant notre projet de deuxième année.
Produire de l’électricité, oui mais comment ?
Pour commencer, notre projet s’intitule “Production d’électricité à partir de l’énergie cinétique”. L’objectif se cachant derrière cet intitulé est de concevoir un système qui nous permettra de transformer l’énergie de rotation d’une voiture en électricité pour ainsi recharger sa batterie. Notre projet s’intéresse donc majoritairement à des véhicules hybrides ou bien électriques.
Ce thème de projet nous a vraiment intéressé et motivé parce que nous pensons qu’il traite d’un réel problème environnemental que nous avons aujourd’hui qui est l’inutilisation de certaines énergies au quotidien. En effet, de nos jours les énergies fossiles se font de plus en plus rares et sont fortement polluantes et néfastes pour la planète. Il est donc important de réfléchir et de trouver des moyens d’utiliser ces énergies “vertes” que l’on perd au quotidien.
La dynamo, notre point de départ
Pour nous aider dans nos recherches, nous avions pour consigne de nous inspirer du principe de dynamo qui est utilisé sur les vélos. Dans le cadre d’un vélo, c’est l’énergie musculaire de l’utilisateur lors du pédalage qui est utilisée. Pour ce faire, un simple galet vient se positionner sur le côté d’un pneu. Lorsque l’utilisateur pédale et donc que la roue tourne, le galet tourne ce qui entraîne la rotation du rotor de la dynamo ce qui permet à celle-ci de fournir du courant afin d’alimenter un éclairage.
Sur cette photo, vous pouvez observez une dynamo qui est installé sur le pneu avant d’un vélo afin de faire fonctionner une lampe.
La partie conception :
1. Comment récupérer cette énergie ?
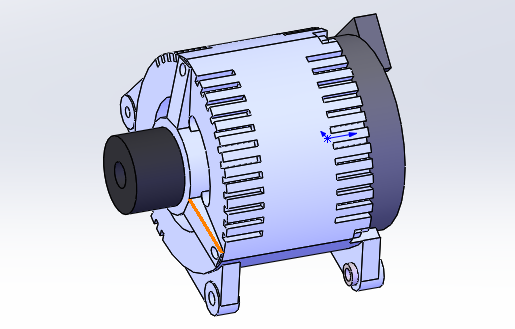
À l’aide de nos recherches sur les différents moyens de récupérer de l’énergie dans une voiture, nous avons décidé de nous servir d’un alternateur. En effet, nous nous sommes rendus compte que ce qui était appelé une dynamo pour les vélos était en fait un alternateur. Le seul problème avec l’alternateur, c’est qu’il va fournir un courant dit “alternatif” en sortie. Pour expliquer simplement, un courant alternatif nécessite une utilisation instantanée de l’électricité comme pour allumer une lampe ou recharger une batterie par exemple. Pour recharger notre batterie nous allons donc utiliser un courant alternatif qui certes permet un rechargement moins rapide qu’un courant continu mais qui protège l’état de cette dernière.
2. Où placer notre système et pourquoi ?
Avant de continuer, nous souhaitons préciser que pour faciliter nos calculs, nous avons choisi un modèle de référence qui est la RenaultZoé.
Comme nous l’avons vu plus haut, une dynamo/un alternateur a besoin d’une vitesse de rotation pour fonctionner. La prochaine étape pour réaliser notre conception fut donc de trouver quel est le meilleur élément en rotation exploitable dans une voiture. Pour ce faire, nous avons répertorié ces différents éléments d’une voiture comme : les roues, l’arbre de transmission, le rotor…
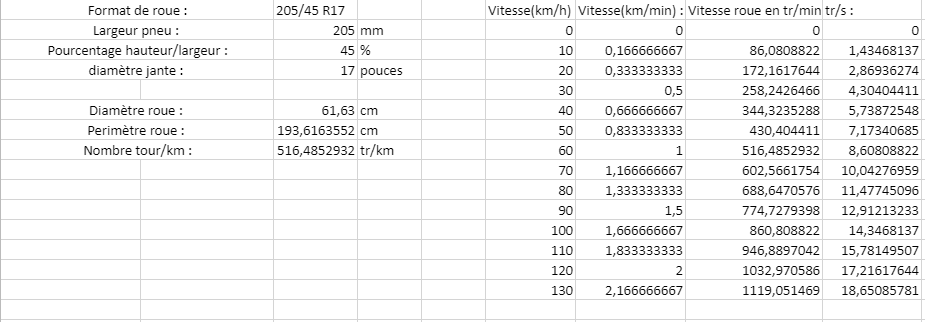
Nous avons alors pu en déduire que la pièce la plus adéquate serait l’arbre de transmission des roues qui se situe généralement à l’arrière du véhicule. Nous nous sommes alors renseignés sur la vitesse de rotation de cet arbre de transmission, et nous avons vu qu’il s’agissait de la même que celle des roues du véhicule. Comme vous pouvez le voir ci-dessous, nous avons réalisé un tableau Excel qui nous permet de trouver la vitesse de rotation des roues en fonction de deux paramètres : pneu et vitesse du véhicule.
Notre tableau Excel permettant le calcul de la vitesse de rotation
Nous avons donc une vitesse de rotation allant de 86 à 1120 tr/min.
3. Les contraintes de l’alternateur et notre solution.
Le problème d’utiliser un alternateur, c’est que pour fonctionner, il faut un nombre de tr/min minimum. En faisant des recherches, nous nous sommes aperçus que cette contrainte minimale variait en fonction des alternateurs (allant de 1000 à 5000). Pour atteindre cette contrainte la vitesse de notre véhicule devrait être 120 ou 130 km/h. Il nous fallait donc trouver un moyen d’augmenter la vitesse de rotation que recevra l’alternateur pour pouvoir générer suffisamment d’énergie.
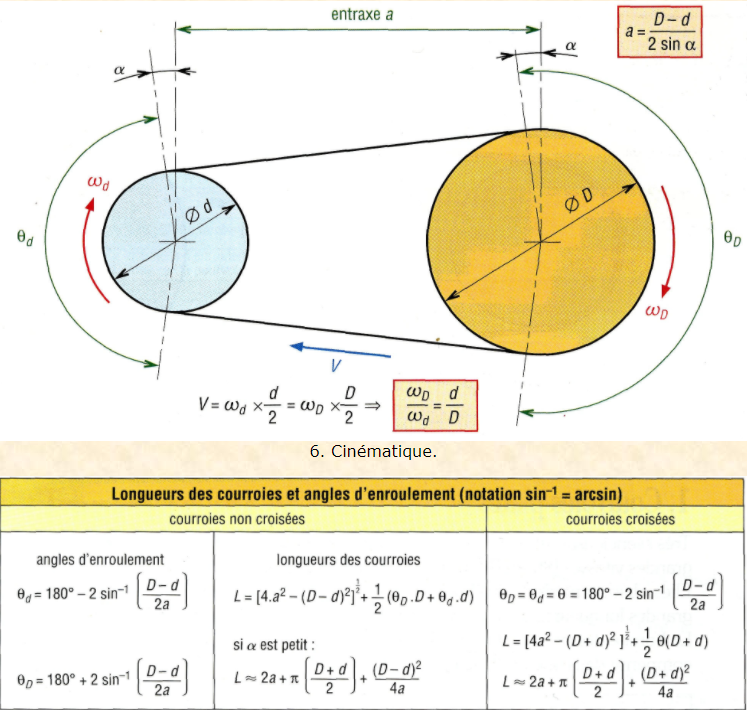
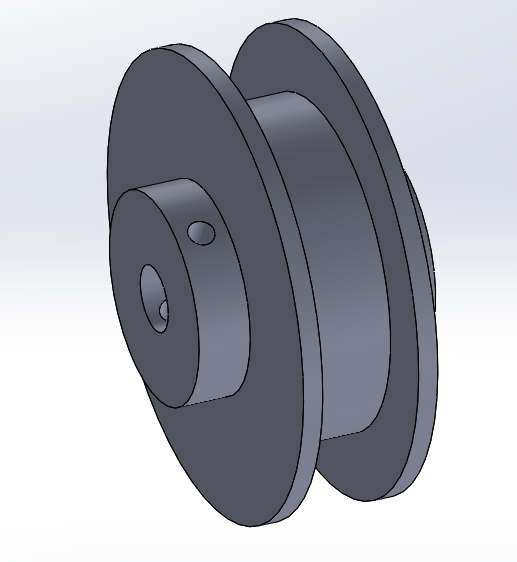
On a donc choisi d’utiliser un système de poulies-courroie qui nous permettrait de multiplier la vitesse de rotation par 2. Pour ce faire, nous nous sommes renseignés sur le site zpag, qui nous a permis de réaliser toute la partie dimensionnement de la poulies-courroie.
Extrait du site zpag qui nous a permis de faire les calculs
En faisant alors les calculs, nous avons trouvé que la poulie d’entrée devait avoir un diamètre de 100 mm, celle de sortie de 50 mm et enfin la courroie une longueur de 320mm.
4. Les fixations
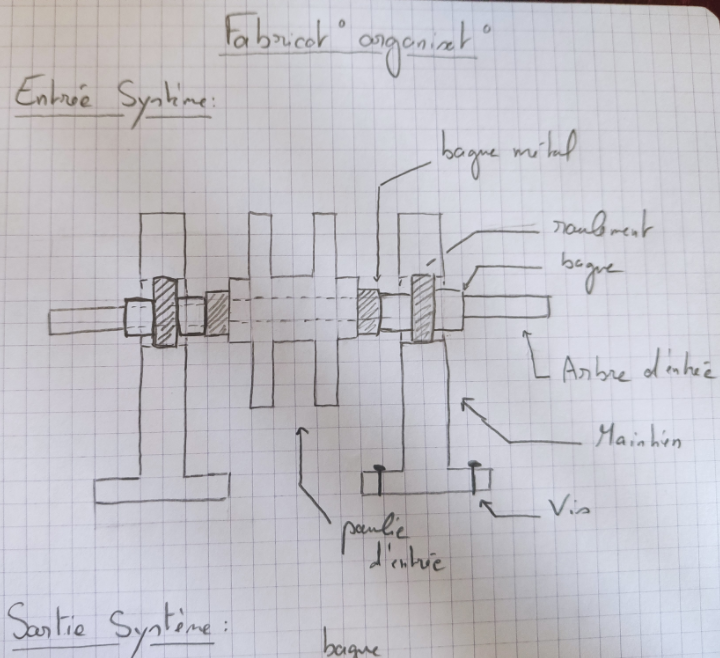
Une fois notre système de production d’énergie trouvé, nous avons dû réfléchir à une façon de fixer ce dernier dans l’arbre de transmission. Pour ce qui est des différentes poulies, nous avions tout d’abord pensé à utiliser des clavettes qui seraient intégrées à l’arbre de transmission pour que la rotation de ce dernier entraîne celle des poulies suivies de deux bagues sur les côtés pour bloquerla translation. Nous avons très vite abandonné cette idée, car après la réalisation des différents calculs, nous avons trouvé un couple qui était de 8000 N.m ce qui entraînait une clavette d’au moins 46.6 cm ce qui est beaucoup trop grand.
Nous en avons donc parlé avec Monsieur Ibrahim et Monsieur Haddad qui nous ont conseillé d’utiliser des goupilles. Nous nous sommes donc renseignés et avons décidé d’utiliser ce système qui devrait nous permettre d’assurer la rotation du système et d’empêcher sa translation.
Pour fixer l’alternateur, nous avions pensé à créer une boite qui servirait à maintenir l’alternateur immobile et qui pourrait être vissée à l’essieu du véhicule. Nous souhaitions prendre rendez-vous avec un garage Renault (concepteur de la Zoé) pour voir si ce système était possible, mais nous n’avons jamais eu de réponse.
5. La CAO
Pour la partie CAO, nous avons utilisé le logiciel Solidworks sur lequel nous avons conçu les deux poulies et l’alternateur. Ci-joint les photos de notre CAO :
Alternateur et poulie de sortiePoulie d’entrée
La fabrication :
1. Comment faire pour adapter notre système sans voiture ?
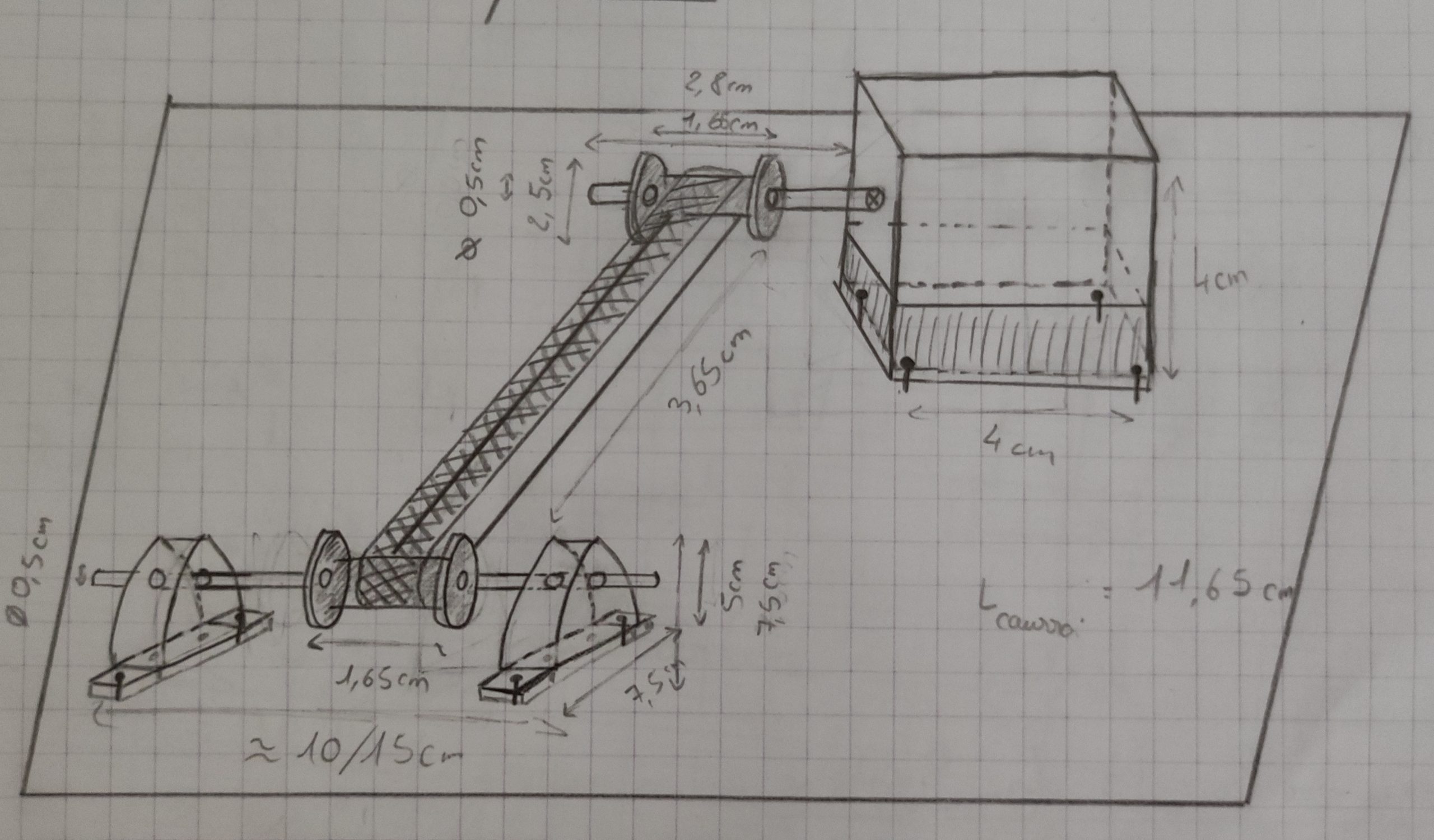
Pour nous assurer que notre système théorique est effectivement fonctionnel, nous devons le réaliser. Mais n’ayant pas de voiture électrique avec nous et disponible pour des tests, il nous a été nécessaire de trouver un moyen de reproduire ce système dans l’enceinte de Polytech. Ci-dessous une représentation réalisée par Jonathan Blandin du système imaginé.
Nous avons donc choisi de réaliser le même système qui est une poulies-courroie. Pour ce faire, nous nous sommes procuré tous les composants qui nous étaient nécessaires. Nous avons donc eu une courroie avec une longueur de 246 mm. Le fait de connaître la longueur de la courroie nous a permis de définir que la poulie d’entrée devait avoir un diamètre de 64 mm et celle de sortie de 32 mm.
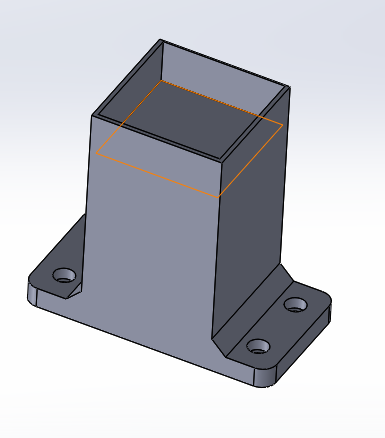
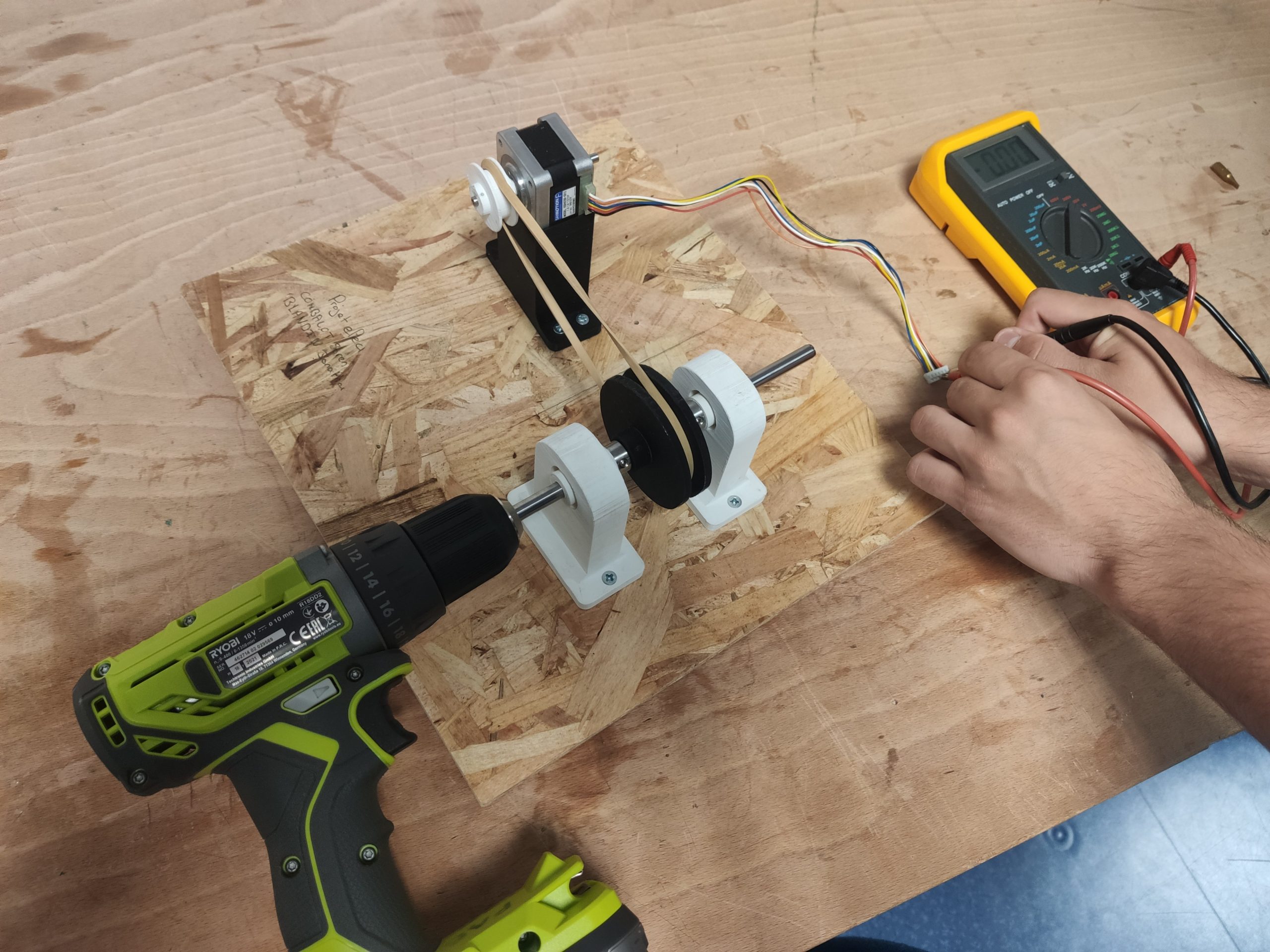
Pour la partie “production d’énergie” le dispositif consiste à remplacer l’alternateur par un moteur pas à pas (situé en haut à droite du schéma ci-dessus) qui sera fixé sur un support pour éviter les mouvements sur ce moteur. Nous y installerons une des deux poulies qui sera conçue sur Solidworks et ensuite imprimé au Fablab. Notre but sera alors de vérifier si nous avons du courant en sortie à l’aide d’un voltmètre.
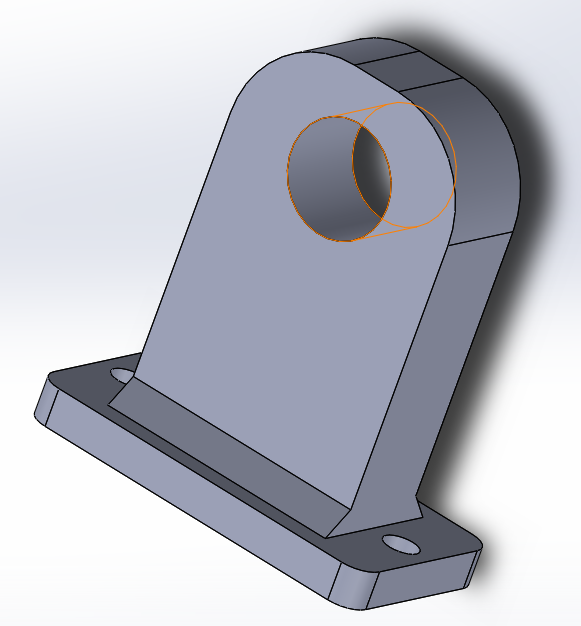
Pièce maintien moteurPoulie de sortie
Ensuite, nous avons réfléchi à un système afin de représenter l’arbre de transmission (un long cylindre métallique). La solution que nous avons adoptée a été d’acheter un arbre de 8 mm de diamètre et 40 cm de longueur et d’y placer la première poulie qui sera conçue sur Solidworks et ensuite imprimée au Fablab. Notre arbre sera alors surélevé à l’aide de support que nous avons nous-même réalisé.
Pièce maintien de l’arbre d’entrée
Tout notre système sera alors monté sur une planche en bois qui assurera la stabilité de ce dernier.
2. Les difficultés rencontrées et nos solutions
Malheureusement, lors de la fabrication de notre système, nous avons dû faire face à de nombreux problèmes. Tout d’abord, nous avons appris une fois nos pièces reçues que nous ne pourrions pas réaliser de goupilles à Polytech parce que le matériel disponible n’est pas conforme pour une précision suffisante. Nous avons dû changer et réfléchir à un nouveau moyen de fixer les poulies.
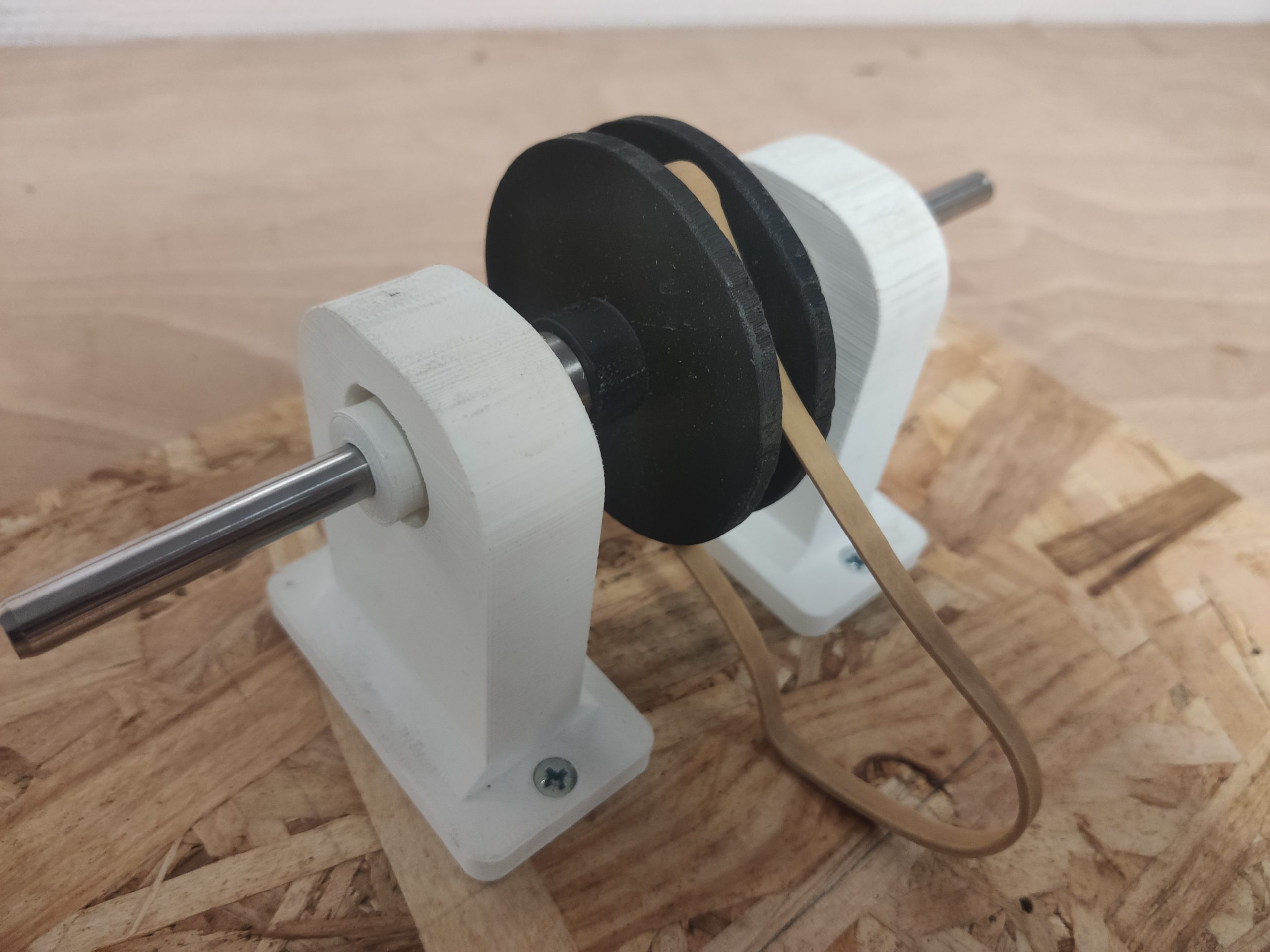
Pour la poulie d’entrée, nous avons utilisé des bagues pour bloquer sa translation et deux roulements pour permettre une meilleure rotation. Pour que les bagues ne bougent pas de l’arbre, nous avons utilisé la technique de monté-serré qui consiste à avoir deux pièces de même diamètre pour qu’il soit quasiment impossible de les bouger une fois placées. Nous avons chauffé les pièces produites par l’imprimante 3D afin de mieux les emboîter. Pour la poulie de sortie nous avons utilisé le même principe de monté-serré avec une simple bague.
Nous avons testé cette disposition et constaté que système est bien bloqué en translation et permet la rotation.
Notre deuxième problème majeur fut la courroie. Tout d’abord, nous l’avons reçu un mois après l’arrivée de nos matériaux. Or, nous nous sommes rendu compte à son arrivé qu’elle était beaucoup trop petite pour fonctionner. Nous avons donc dû trouver un moyen de la remplacer et rapidement. Nous avions pensé à utiliser du papier peint que nous aurions collé sur plusieurs épaisseurs pour en faire une courroie suffisamment résistante. Mais nous avons abandonné cette idée, parce qu’elle nous semblait longue à réaliser, peu fiable et peu précise dans ses dimensions. Nous avons alors trouvé une idée qui serait sûrement plus précise et plus résistante. La solution fut d’utiliser un grand élastique d’environ 5 mm de large et de le tendre suffisamment pour en faire une courroie.
Une fois tous les problèmes surpassé, nous avons pu procéder à notre assemblage final :
Enfin, notre dernière étape fut de tester si nous avions bien une tension à la sortie de notre système à l’aide d’un voltmètre.
Comme vous pouvez le voir sur la vidéo, nous avons réussi à obtenir un courant d’environ 6 volts, ce qui démontre bien qu’il est possible de récupérer de l’électricité à l’aide de l’arbre de transmission d’une voiture.
Pour conclure, ce projet nous aura permis de mettre en pratique toute nos connaissances acquises lors de notre prépa mais aussi de nous conforter dans nos différents choix de spécialités, QIF et SAGI.
Nous tenions à remercier Monsieur Adel Haddad notre professeur référent pour s’être rendu disponible afin de nous aider.