Nous sommes deux étudiants, Justine et Adrien, en deuxième année du cycle préparatoire de Polytech Angers.
Durant ce dernier semestre, nous avons pu travailler sur la conception et la réalisation d’une maquette de maison intelligente.
L’objectif du projet
Nous savons que le comportement des usagers d’un bâtiment a un impact significatif sur la consommation d’énergie mais ces données s’appuient uniquement sur des observations limitées. Grâce à la réalisation de cette maquette de maison équipée de capteurs enregistreur de données (telles que l’humidité, la luminosité ou encore la température), nous avons pu modéliser et étudier l’impact du comportement des occupants sur la consommation d’énergie.
Les travaux réalisés
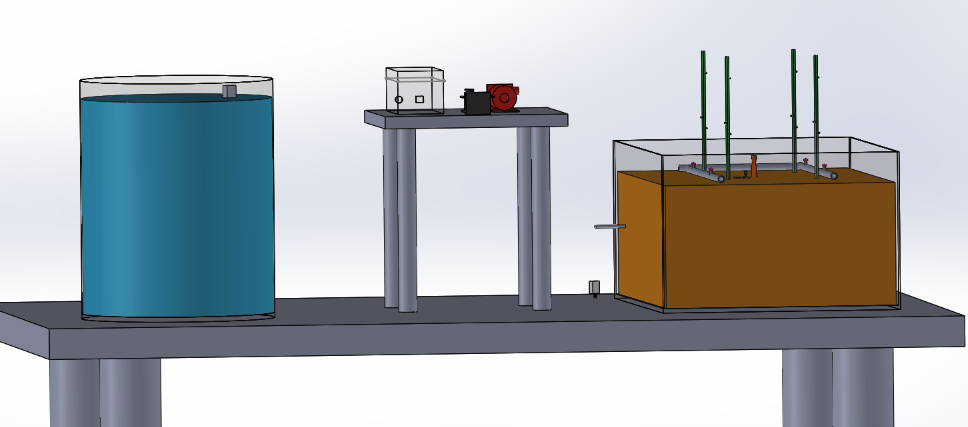
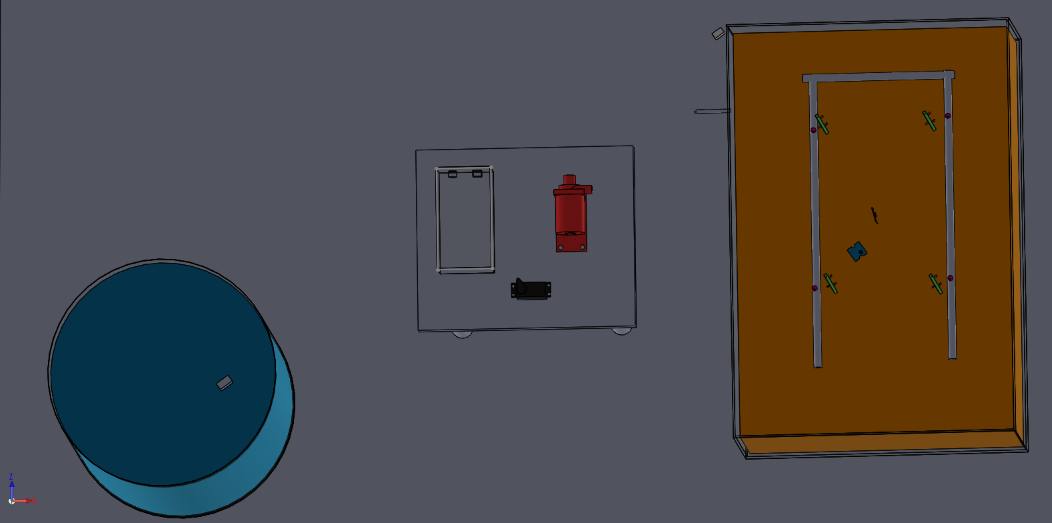
Dans un premier temps, nous avons réalisé la maquette sur un logiciel de modélisation 3D.
Nous avons utilisé le logiciel Sketchup, qui a l’avantage d’être gratuit.
L’objectif principal de notre projet était de réaliser une maquette de maison afin d’y installer les différents capteurs. Nous avons décidé d’ajouter une autre contrainte, la maison doit être séparée en deux blocs : l’un isolé et l’autre non-isolé (mais tous deux équipés d’une lampe pour chauffer) afin de constater l’impact d’un isolant sur son environnement.
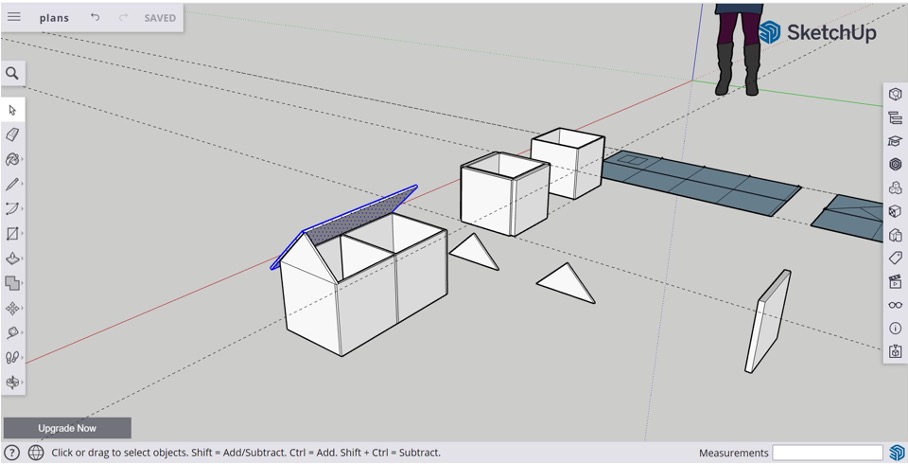
Modélisation de la maquette en taille réelle
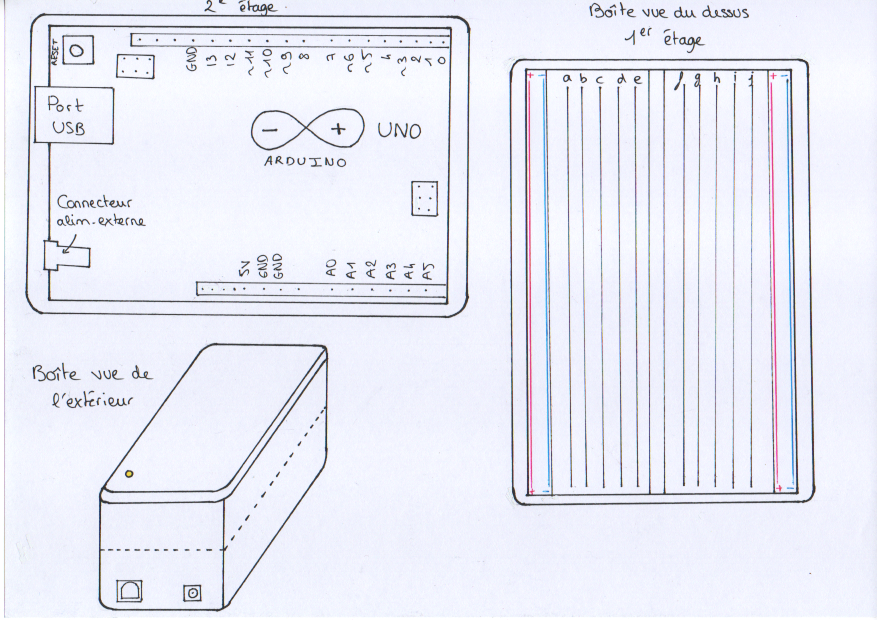
Afin de mesurer les données, nous avons utilisé une carte Arduino Leonardo ainsi que différents capteurs :
- -Un pour la luminosité
-Un pour détecter l’ouverture/fermeture des fenêtres
-Un pour la température et l’humidité
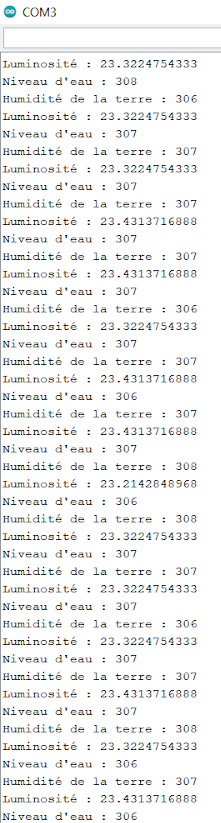
Il nous a alors fallu les coder dans le langage Arduino. Voici un exemple du code utilisé pour le capteur mesurant la température et l’humidité :
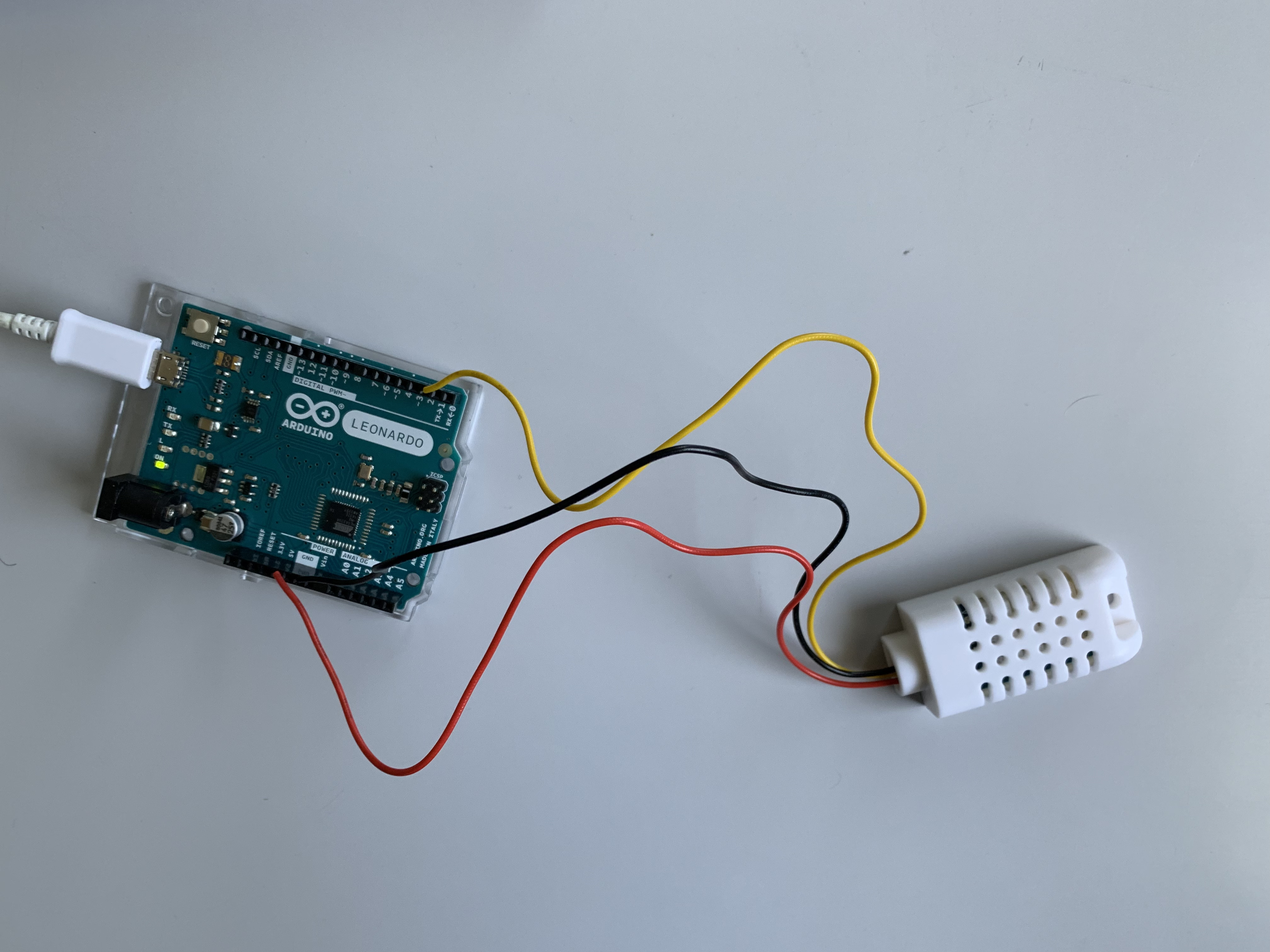
Montage du capteur
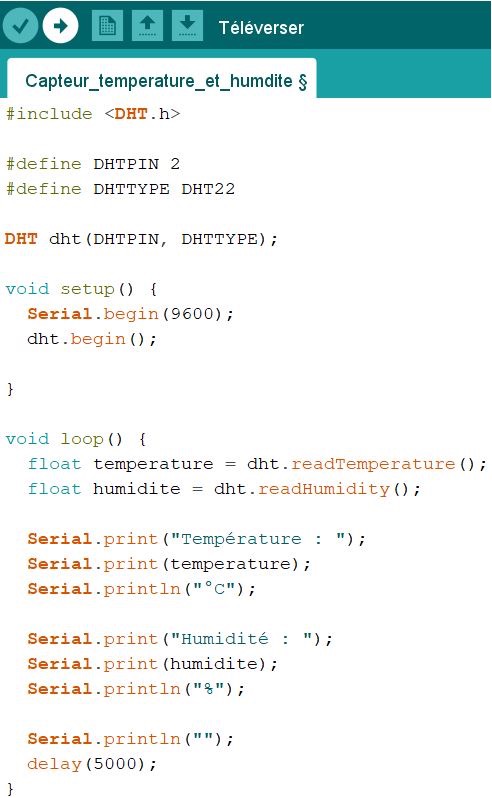
Ici les mesures sont effectuées toutes les 5 secondes
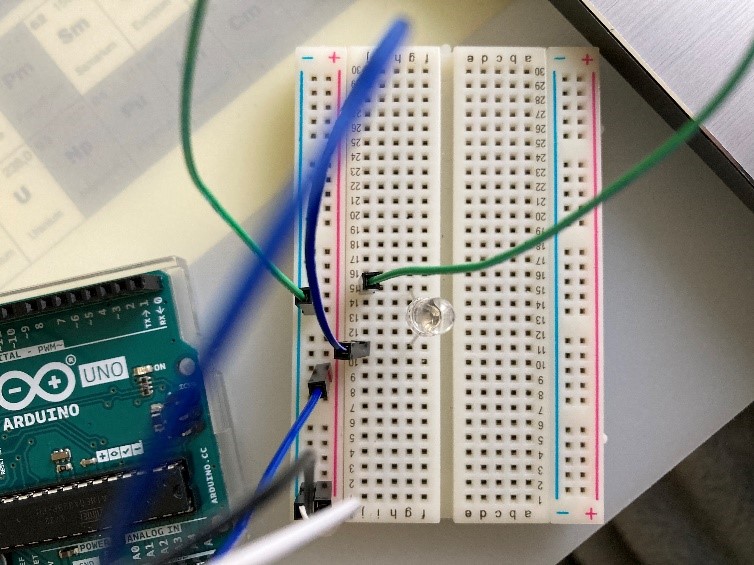
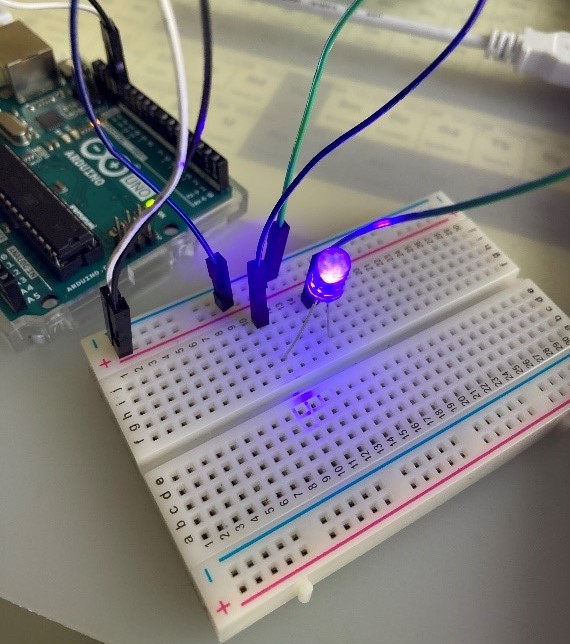
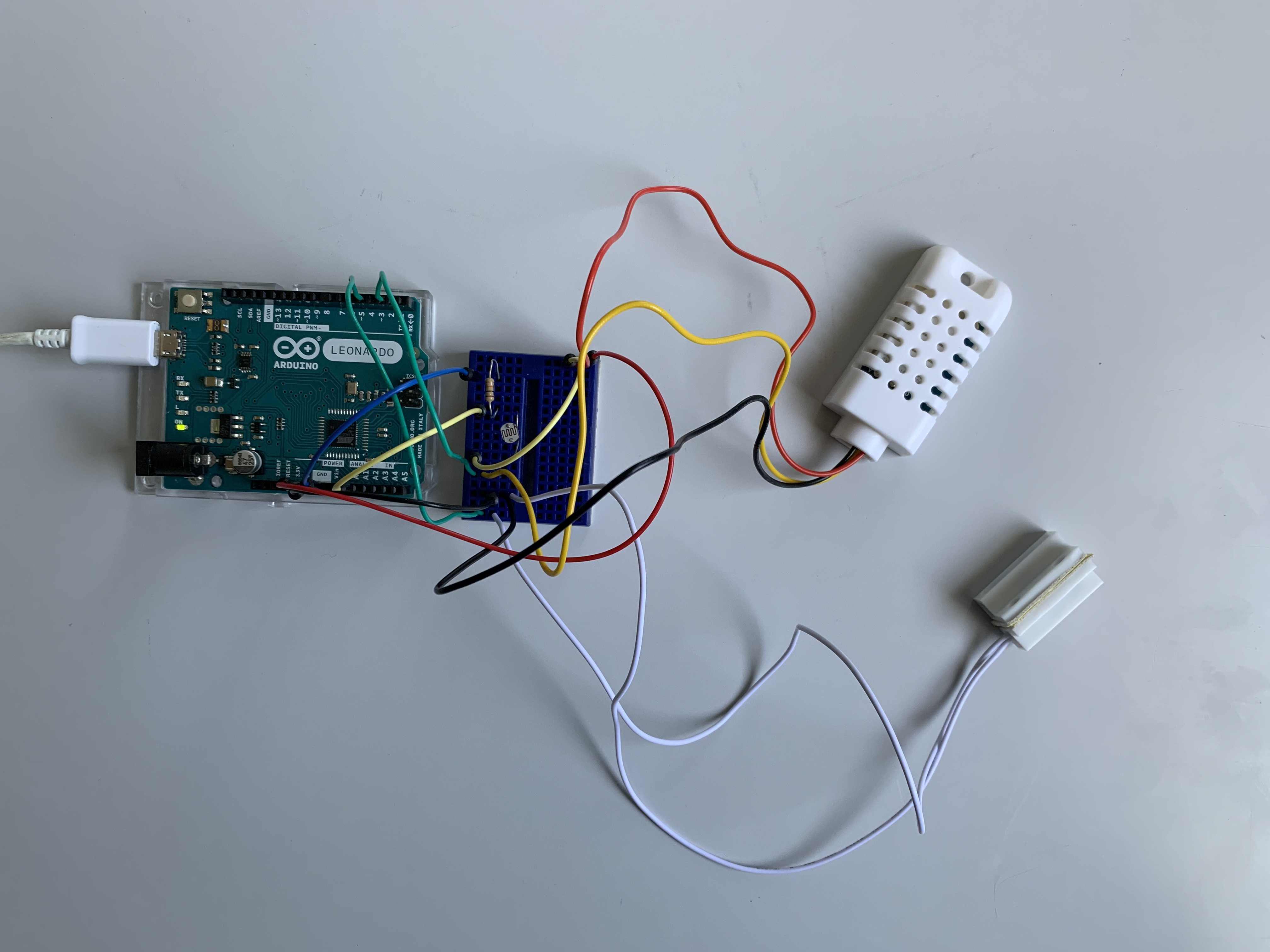
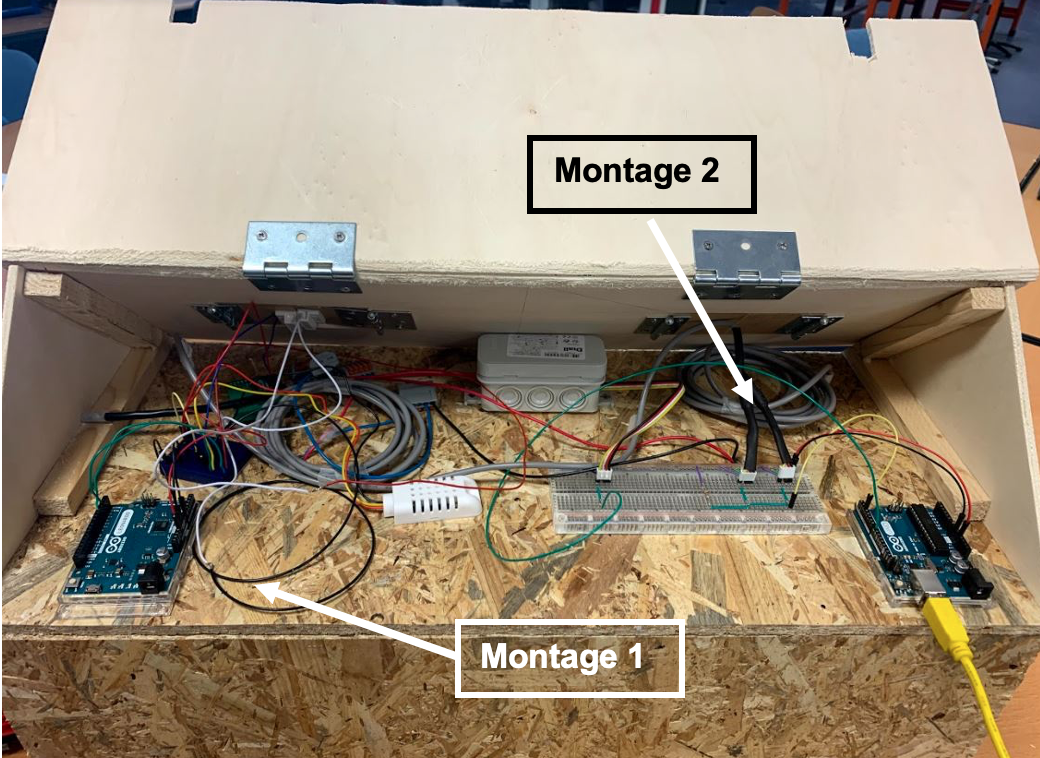
Ci-dessous, le premier montage comprenant les trois capteurs cités précédemment. Il sera placé dans le toit qui comporte les ouvertures.
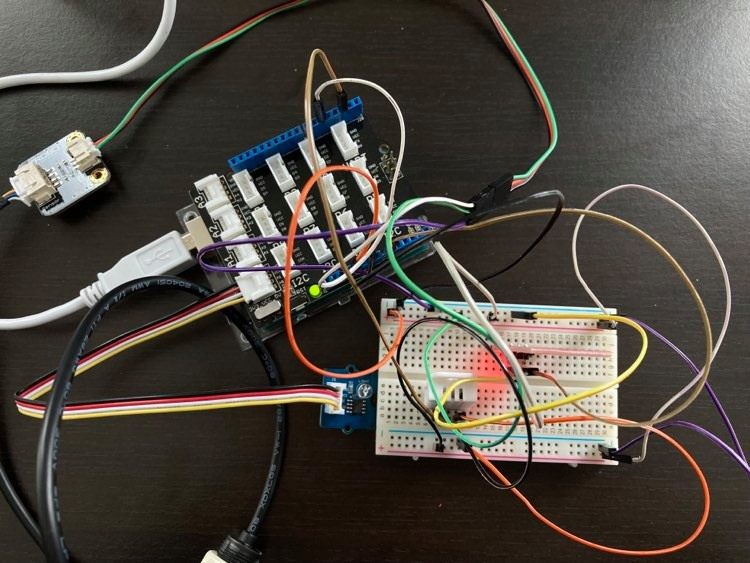
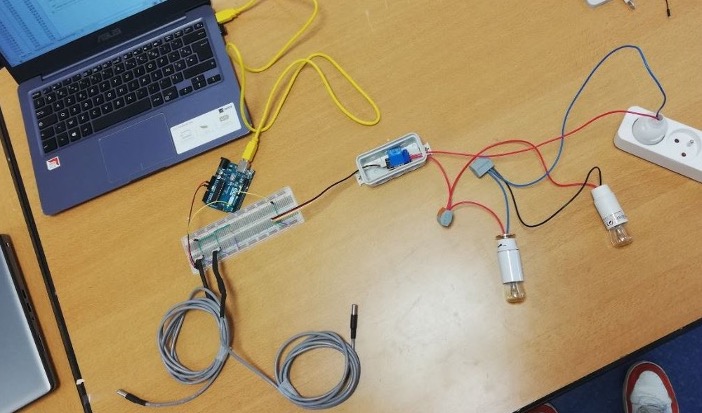
Puis, nous avons réalisé un second montage, qui sera placé à l’intérieur des pièces, comportant les deux lampes et les deux sondes de température (plus précises que le capteur de température) :
Grâce à la modélisation, nous connaissions les dimensions de notre maquette. Malgré cela, nous avons rencontré quelques problèmes lors de cette étape : difficulté à la découpe, mauvais choix du matériau (notre premier choix était le PVC), etc..
Nous avons finalement réalisé notre maquette en bois OSB et avons assemblé les différentes découpes avec des équerres.
Il a ensuite fallu ajouter l’isolant (du polystyrène) dans la pièce concernée.

Intérieur de la maquette
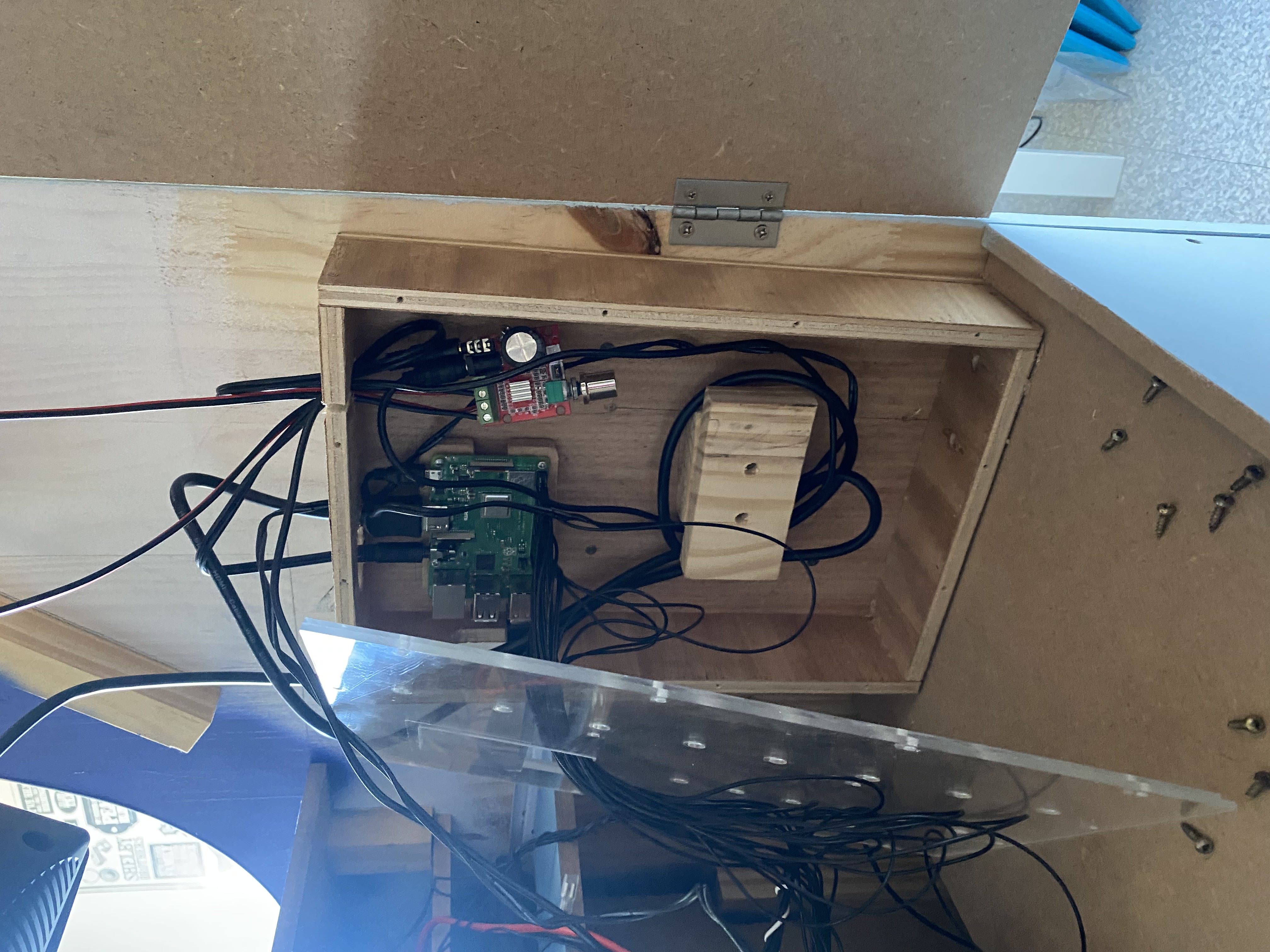
Puis, nous avons réalisé le toit. Nous souhaitions qu’il contienne toute l’installation des capteurs, en ce sens, il devait pouvoir s’ouvrir afin d’en permettre l’accès.

Maquette finale
Par la suite, nous avons mis les capteurs dans la maquette : les deux montages sont installés dans le toit et nous avons placé les différents capteurs.
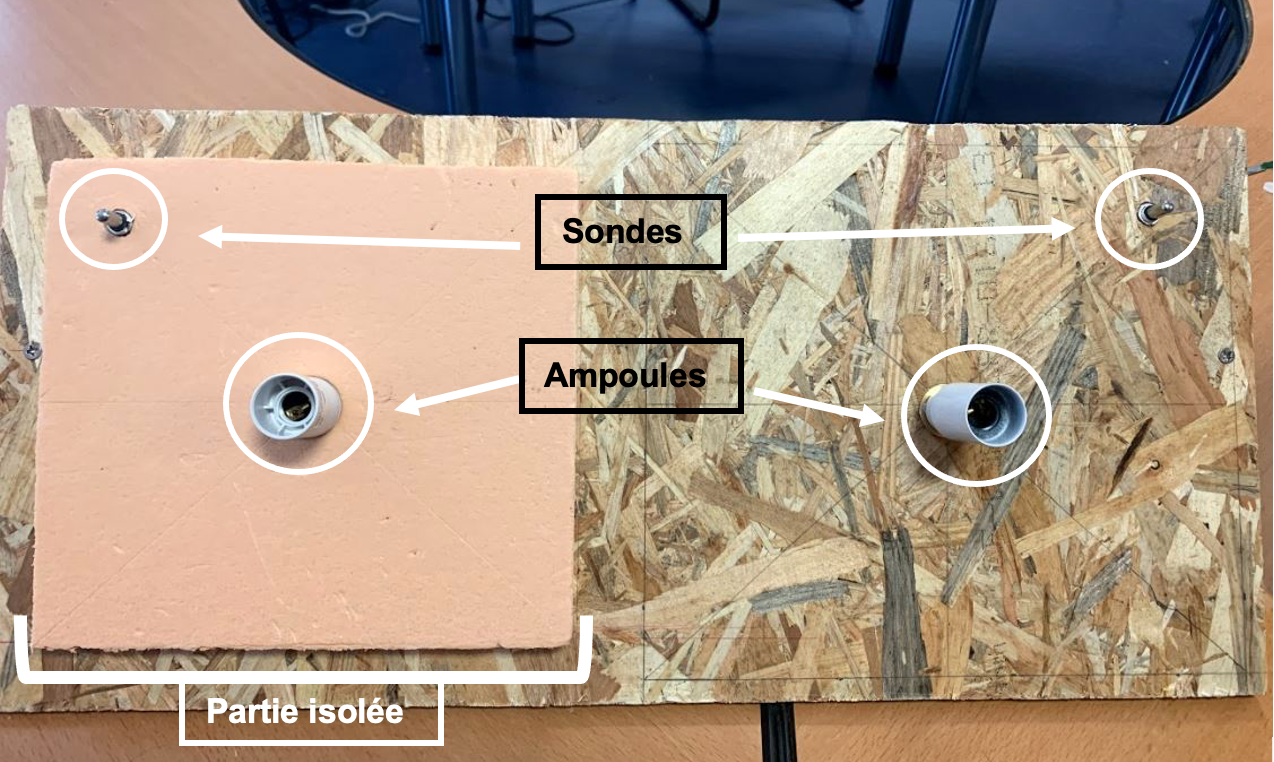
Toit vue de l’intérieur des pièces
Intérieur du toit
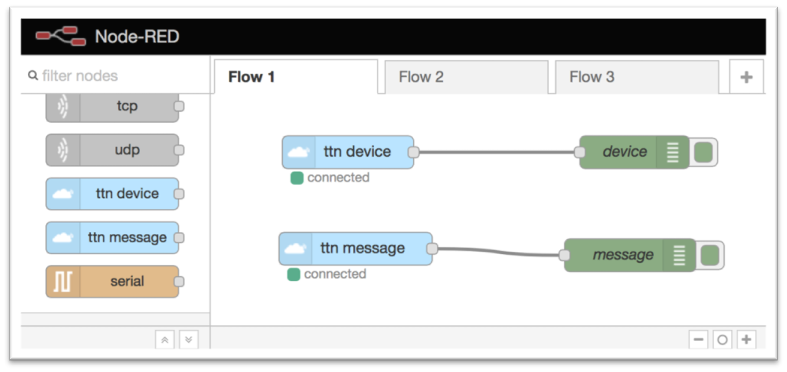
Pour collecter nos données, nous avons utilisé un compilateur de données pour Excel qui permet de tracer un graphique en temps réel.
Les essais des deux tests ont été réalisés dans les mêmes conditions.
Pour le montage 2, nous devions choisir un temps d’éclairage des lampes (le même pour les deux pièces) avant que les données soient collectées afin de faire monter en température l’air des pièces.
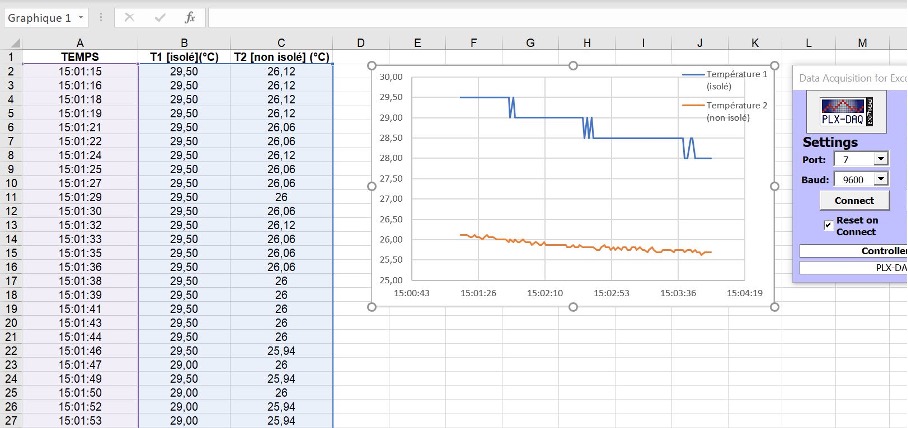
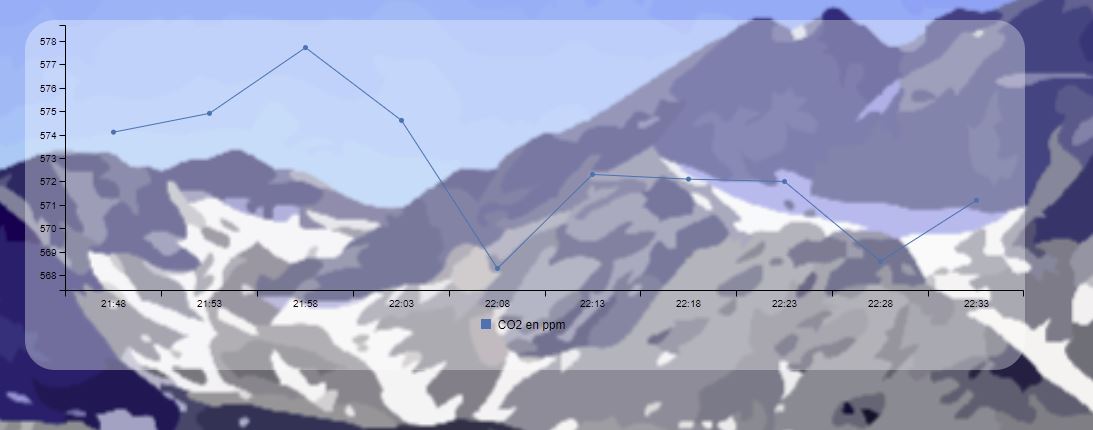
Résultat pour le montage n°2 avec 2min d’éclairage et une prise de données toutes les secondes
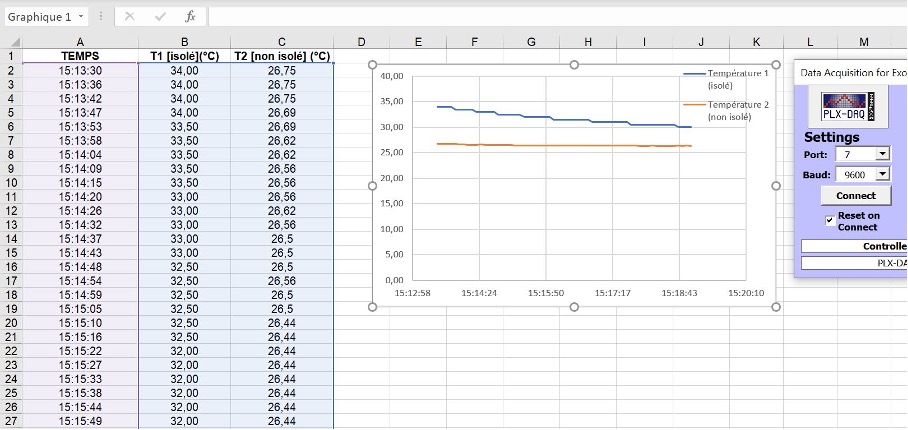
Résultat pour le montage n°2 avec 4min d’éclairage et une prise de mesures toutes les 5sec
Ainsi, on peut constater que la température de la pièce isolée augmente plus que dans la pièce non-isolée, mais elle diminue aussi plus rapidement.
Nous pensons que nos essais ayant étaient faits lors d’une chaude journée, la température de la pièce non-isolée est restée assez constante par rapport à l’extérieur entraînant une faible différence entre pièce chauffée et non-chauffée.
Conclusion
Ce projet fut très enrichissant pour la suite de nos études puisqu’il nous a permis d’apprendre à maîtriser un logiciel de modélisation, de découvrir le langage Arduino et de coder des capteurs. Il nous a également apporté au point de vue personnel : nous avons pu développer certaines compétences telles que l’autonomie, la communication ou encore l’organisation qui sont, de plus, des compétences indispensables en tant qu’ingénieur.
Nous tenons à remercier Mr.Riahi, notre professeur encadrant, pour son aide apportée tout au long de ce projet.