Introduction
Bonjour à tous ! Nous sommes un groupe de 4 étudiants composé de Tony Blin, Yann Guivarch, Albert Lienart et Dorian Leroux. Nous nous intéressons tous de près ou de loin à l’exploitation, à la maintenance et à la sécurité des bâtiments. Ce projet nous a tout de suite intéressés.
Intérêt du projet
Notre projet consiste à concevoir un mur en maçonnerie et à trouver une façon de le renforcer pour résister aux effets sismiques. Ce projet nous a donc permis d’acquérir des compétences dans le domaine du renforcement que nous n’aurions sûrement jamais découvert sans s’être intéressé à ce projet. Pour certains d’entre nous, il nous a ouvert les yeux sur notre avenir et nous a fait découvrir une passion pour les spécialités du bâtiment tel que “L’Exploitation, Maintenance et Sécurité des bâtiments” ou encore la spécialité “Bâtiments”.
Décomposition du projet
Notre projet est divisé en 4 étapes :
- Recherche sur le sujet
- Choix de la méthode de renforcement
- Modélisation sur Revit
- Notre maquette
Nos recherches
Nous avons divisé notre projet en différentes phases de recherche afin d’avancer chronologiquement.
Dans un premier temps, nous devions comprendre le comportement d’un mur en maçonnerie sous l’effet sismique. Nous nous sommes donc renseigné sur l’historique de la maçonnerie dans la construction ainsi que leurs domaines d’application.
De plus, nous nous sommes également documentés sur les séismes, l’identification des murs porteurs d’un bâtiment, ainsi que l’effet des séismes sur ceux-ci.
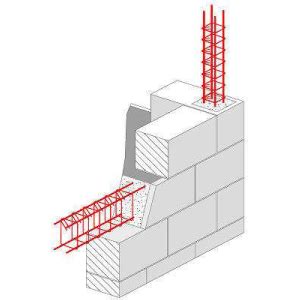
Dans un second temps, nous avons recensé les différentes méthodes de renforcement en relevant pour chacune leurs avantages, inconvénients ainsi que leurs coûts. C’est ainsi que nous avons choisi la méthode de renforcement par chaînage pour la suite de notre projet.
Modélisation sur Revit
- Présentation du logiciel
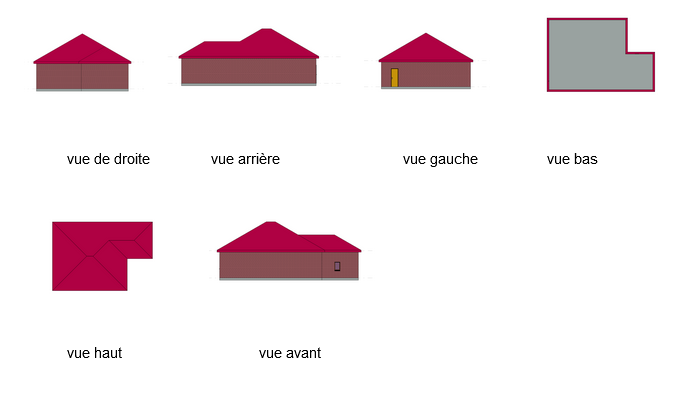
Revit est un logiciel de conception de bâtiments qui permet de créer un modèle en 3D d’un bâtiment et de générer divers documents nécessaires à sa construction, tels que des plans et des perspectives. Il s’agit d’un logiciel de CAO destiné aux professionnels du secteur de la construction, c’est pourquoi nous avons utilisé ce logiciel pour la réalisation de notre maison.
Nous avons décidé de concevoir une maison de plain-pied assez simple afin de pouvoir effectuer des simulations sur le logiciel. L’objectif était d’appliquer différentes charges (charges permanentes, charges d’exploitation, charges sismiques) pour simuler au mieux les contraintes subies par une maison lors d’un séisme.

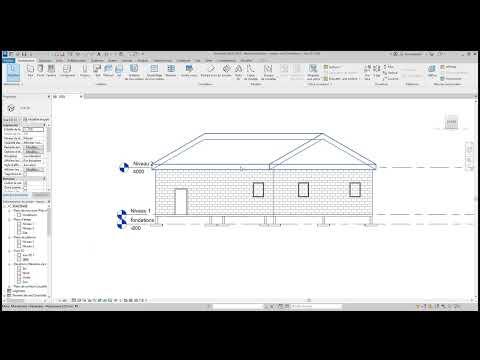
Logiciel Revit
- Calcul des charges sur Revit
Voici les 3 types de charges que nous avons introduites dans le logiciel Revit :
- Le premier type de charge est la charge permanente, qui correspond au poids propre des éléments de la structure tels que les murs, les planchers, les poutres, etc. Pour calculer cette charge une descente de charge est appliquée à chaque élément de la construction.
- Le deuxième type de charge est la charge d’exploitation, qui correspond aux forces exercées sur le bâtiment par les équipements, les occupants, les meubles, etc. Cette charge peut varier en fonction de l’utilisation du bâtiment et doit être prise en compte dans le calcul de la résistance de la structure.
- Cette charge peut varier en fonction de l’utilisation du bâtiment et doit être prise en compte dans le calcul de la résistance de la structure. Des indications pour calculer cette charge sont données dans l’Eurocode en prenant en compte une surface d’influence. Enfin, la charge sismique est la charge la plus critique pour la sécurité du bâtiment.
Notre maquette
- Réalisation maquette
Pour réaliser notre maquette (voir photos), nous avons découpé environ 50 kaplas en 3 pour les utiliser comme briques. Pour modéliser les murs en maçonnerie, nous avons utilisé des briques en bois de dimensions 4 cm x 2,5 cm x 0,8 cm. Le mortier de maçonnerie a été représenté par de la colle chaude, ce qui nous a permis de fixer les briques ensemble pour construire les murs.


Dimensions de la maquette
Cette maquette a été fabriquée à partir de matériaux ayant une densité et une masse différentes de celles des matériaux réels. De plus, les vibrations ont été générées manuellement, ce qui les éloigne des vibrations réelles d’un séisme. Il est important de noter que cette maquette n’est pas une reproduction fidèle de la réalité, mais son objectif était de nous permettre de visualiser physiquement les aspects de notre projet.
- Nos expériences
L’objectif était de tester la résistance de notre maquette aux tremblements. Pour ce faire, nous avons généré manuellement les tremblements en agitant progressivement la table sur laquelle elle était posée. Nous avons ainsi pu effectuer plusieurs essais en modifiant certains paramètres de construction de la maquette. Pour le premier essai, nous avons assemblé la maquette en fixant légèrement les briques les unes aux autres à l’aide de colle chaude.
Pour le premier essai, nous avons construit la maquette en collant légèrement les briques entre elles à l’aide de colle chaude.
Pour le second essai, nous avons souhaité tester notre solution de renforcement sismique en modélisant le chaînage à l’aide de fil de fer. Nous avons donc fixé des morceaux de fer à la colle chaude, en les disposant verticalement et horizontalement le long des murs.
Avec cette seconde méthode de chaînage, nous pouvons clairement observer la différence sur notre maquette, où tout est en place. Ainsi, le risque d’effondrement est désormais nul ou minimal.
Problèmes rencontrés
Le projet de renforcement sismique des murs en maçonnerie a présenté plusieurs défis pour notre équipe de travail. Le premier défi consistait à choisir la meilleure méthode de renforcement pour le mur en maçonnerie, en tenant compte de différents facteurs tels que la géométrie du mur, les matériaux de construction et le budget disponible.
Le deuxième défi était de maîtriser le logiciel Revit, d’appliquer les charges sur le bâtiment, de trouver les formules appropriées adaptées à notre structure, et de comprendre les coefficients mentionnés dans l’Eurocode, qui contient de nombreuses réglementations essentielles.
Enfin, la communication et la collaboration entre les membres de notre équipe ont joué un rôle crucial dans le succès du projet. Nous avons veillé à ce que chacun comprenne clairement son rôle et ses responsabilités, et que les informations soient partagées de manière transparente et régulière.
Grâce à notre engagement, notre collaboration et notre persévérance, nous avons réussi à surmonter ces défis et à mener à bien le projet de renforcement sismique des murs en maçonnerie.
Conclusion
Notre étude sur le renforcement sismique des murs en maçonnerie nous a permis de comprendre l’importance de prendre en compte la résistance sismique des bâtiments existants, en particulier ceux construits avec des murs en maçonnerie. Nous avons examiné différentes techniques de renforcement sismique et avons finalement opté pour la méthode de chaînage afin de renforcer notre mur.
L’équipe renfo mur