Pour finaliser notre cycle préparatoire, nous avons pu prendre part à un projet tutoré. Parmi de nombreuses propositions nous avons choisi le thème de la maison connectée. Ce projet nous a permis de passer de la théorie des cours à la pratique d’un projet en équipe.
Mais qui sommes-nous ?
Nous sommes 4 étudiants du cycle préparatoire de l’ISTIA, école d’ingénieur de l’université d’Angers, qui avons choisi ce projet mélant domotique, travail manuel et également informatique.
L’objectif du projet était simple : réaliser une maison permettant à l’utilisateur de tout contrôler à partir d’une interface (une application pour smartphone par exemple). “Tout” c’est-à-dire l’éclairage, la porte de garage, le chauffage, …
Ce contrôle devait se faire grâce à un microcontrôleur, qui est en fait un mini-ordinateur embarqué dans la maison.
Conception de la maison
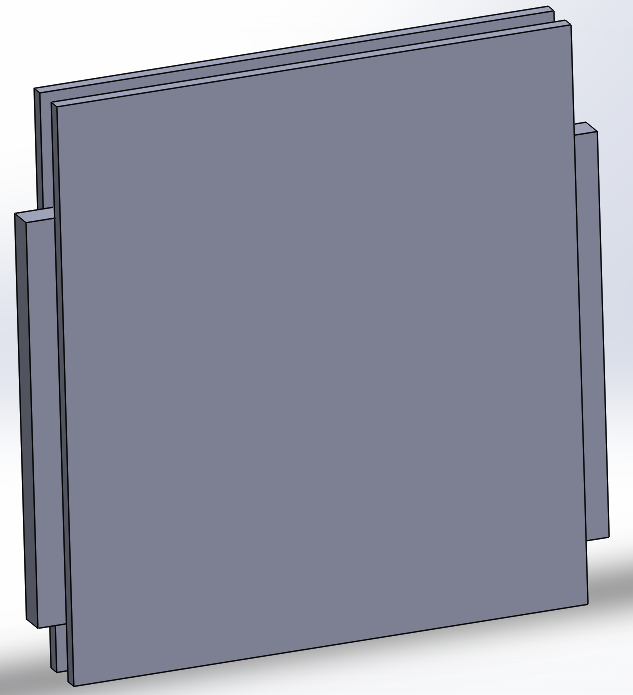
Tout d’abord, notre idée était de réaliser la maison sur un logiciel de CAO (Conception Assistée par Ordinateur) puis de l’imprimer grâce aux imprimantes 3D de notre école. Voici le résultat de 60h de travail sur le logiciel SolidWorks :
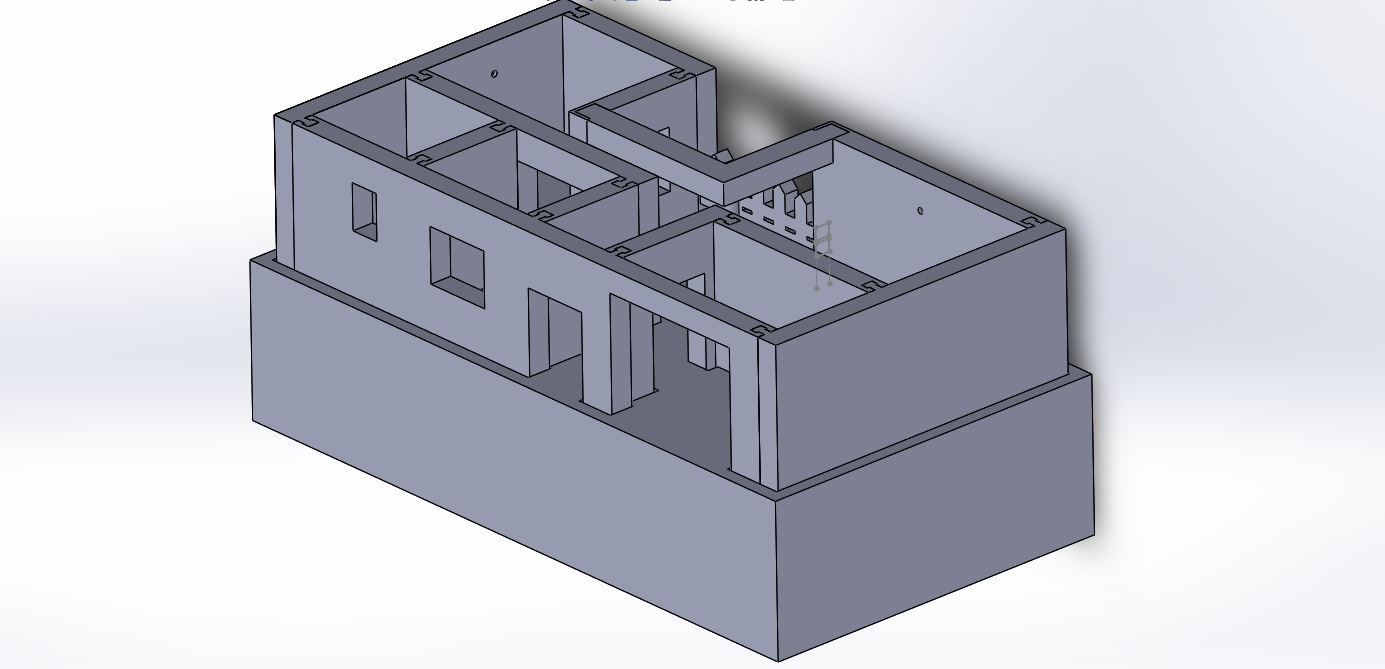
Notre maison réalisée en CAO
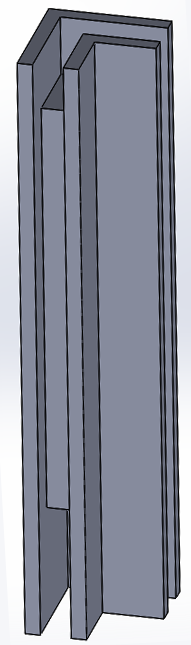
Les murs ainsi que le socle de la maison devaient être imprimés séparément puis assemblés les uns avec les autres grâce à un système de fixation. L’intérieur des murs était quant à lui composé de “triangles” afin de solidifier le mur mais également de permettre le passage des fils électriques sans qu’ils se baladent partout dans la maquette.
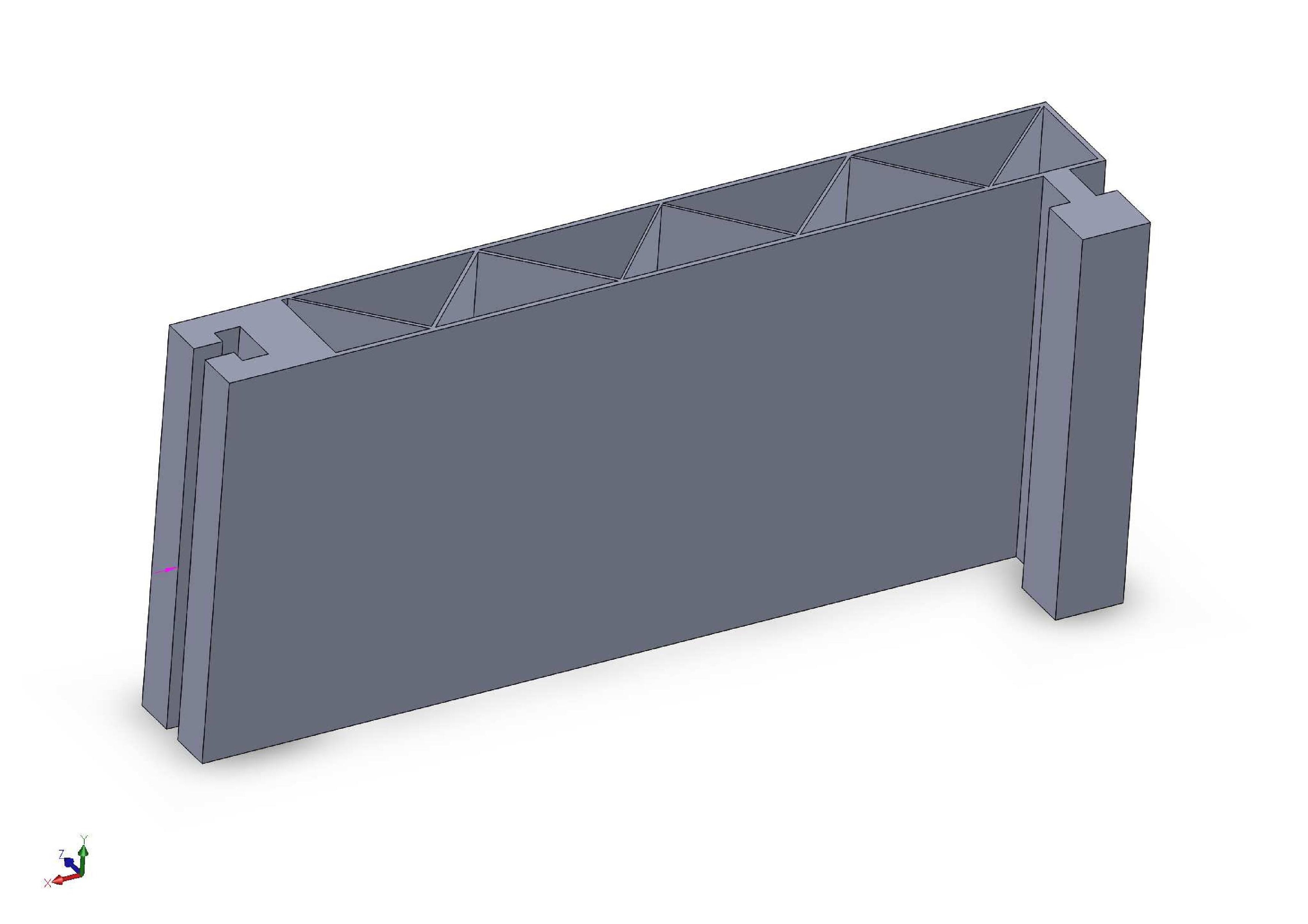
Portion d’un mur de la maison
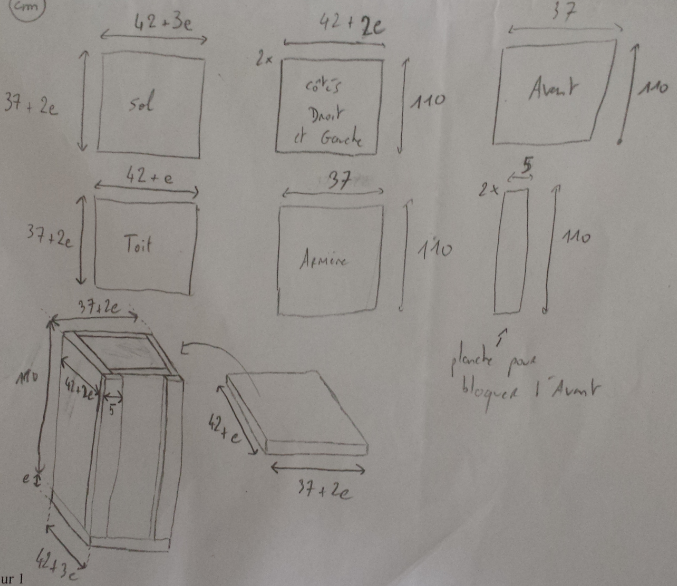
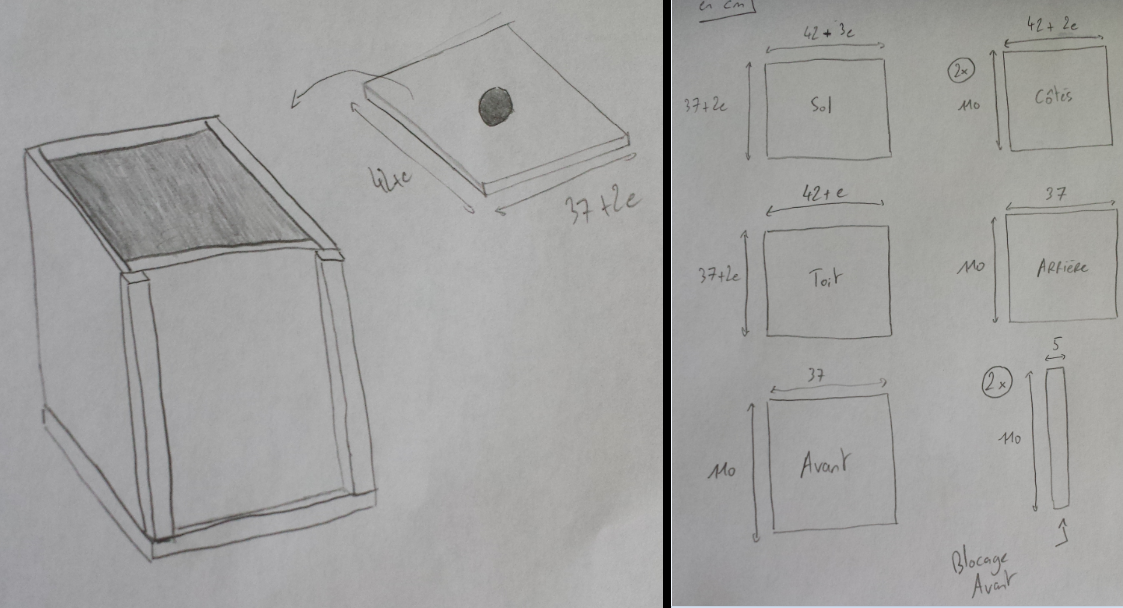
Après des problèmes d’impression 3D, nous avons décidé de changer du tout au tout, et de réaliser notre maison en bois, ce qui ne changerait rien a part l’intérieur des murs qui serait plein.
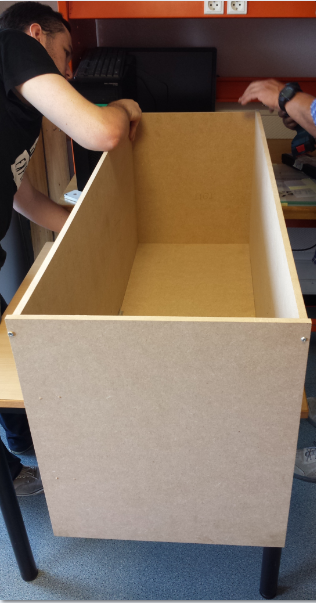
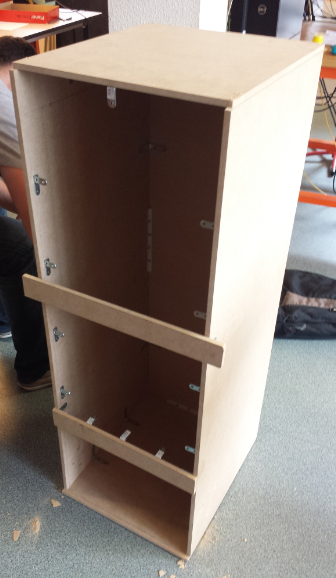
Nous avons donc utiliser des planches de bois contreplaqué que nous avons découpé à la scie sauteuse puis assemblé pour réaliser notre maison. Les dimensions de la maison étant déjà fixées pour la maison à imprimer, nous avons donc repris les mêmes.
Montage de notre maison en bois
En parallèle, la conception de la porte de garage automatique ainsi que la réalisation du schéma électrique ont été des tâches assez conséquentes.
Réalisation de la porte de garage
Premièrement, la porte de garage a nécessité une réflexion sur le mode d’ouverture de la porte (porte à enroulement comme un volet roulant, porte glissante, porte à battant, …). La solution retenue fut celle de la porte à enroulement pour économiser l’espace.
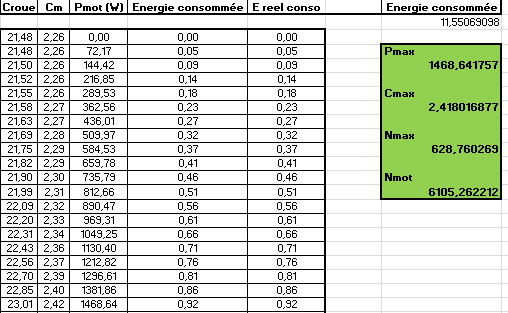
Pour la transmission entre le moteur et l’arbre autour duquel va s’enrouler nous avons utiliser un système poulies/courroie comme sur le schéma suivant :
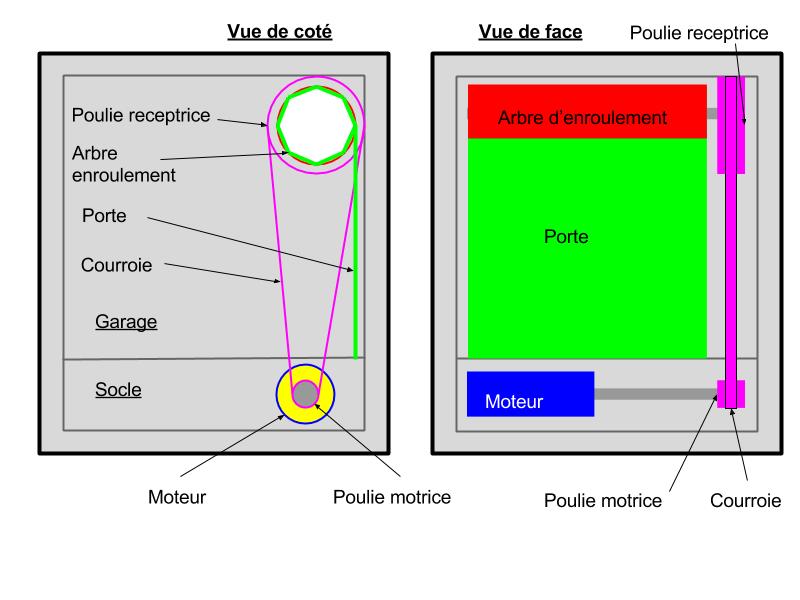
Schéma du fonctionnement de la porte de garage
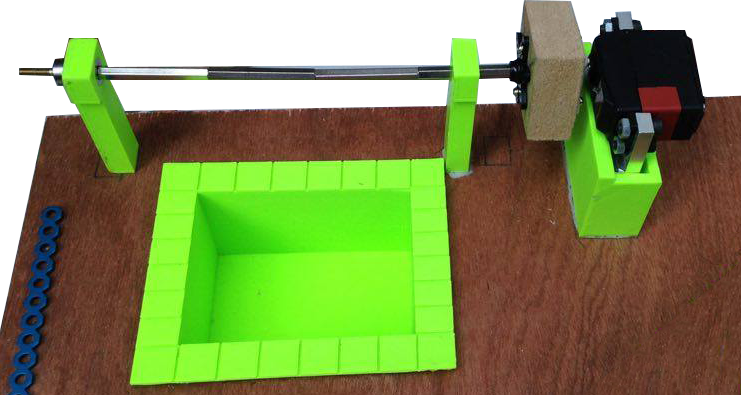
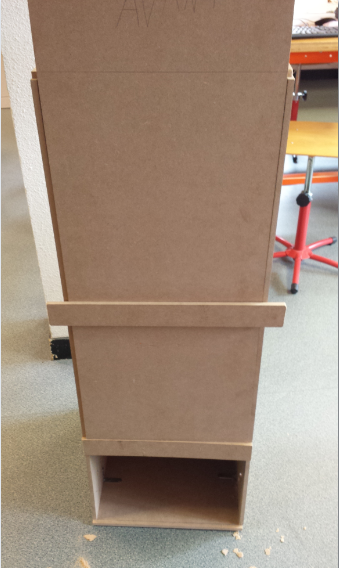
Et voici le résultat final monté sur la maison :
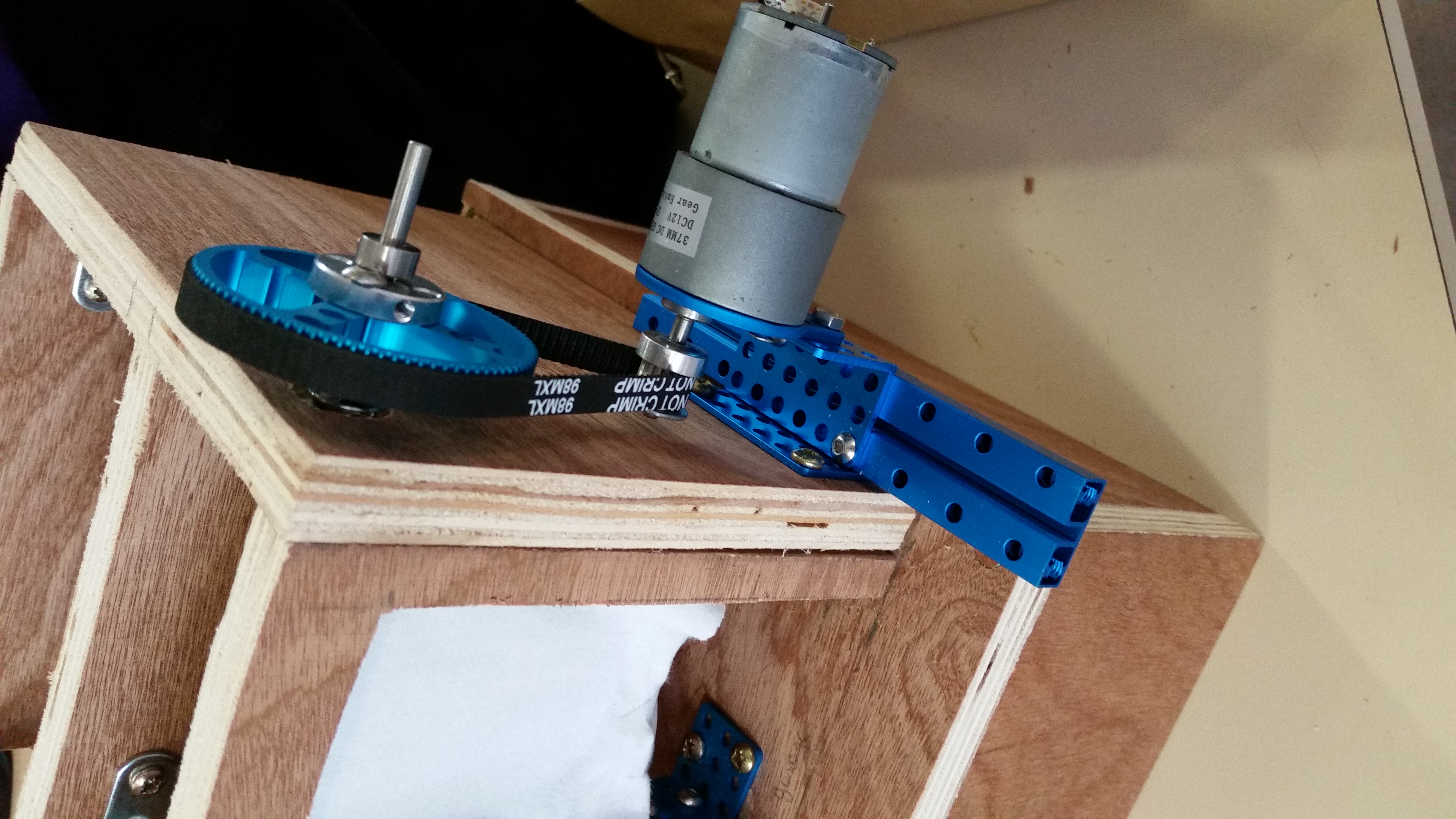
Montage moteur & transmission monté sur la maison
Partie électrique de la maison
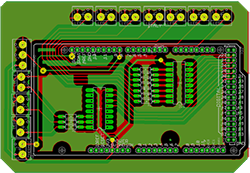
Deuxièmement, le schéma électrique devait nous permettre d’alimenter les composants de la maison avec une tension suffisante et de contrôler le tout à partir de notre microcontrôleur grâce à un programme informatique. Il a fallu partir de zéro pour cette partie ce qui a plutôt compliqué la tâche même si de nombreuses choses existent déjà sur internet. La finalité est un circuit imprimé réalisé par une imprimante spéciale et intégré sur le microcontrôleur.

Exemple de circuit imprimé réalisé par la machine
Finalité du projet
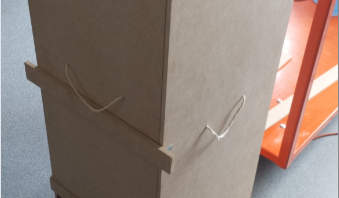
Finalement notre maison fut finie et il ne restait plus qu’à ajouter le circuit électrique ainsi que les différents composants (LEDs, capteurs, …). Même si il a été difficile de réaliser nos attentes du début de projet, nous sommes arrivés à une fin plutôt satisfaisante et avec une porte de garage fonctionnelle malgré le fait qu’elle ne soit symbolisée que par un morceau de tissu.
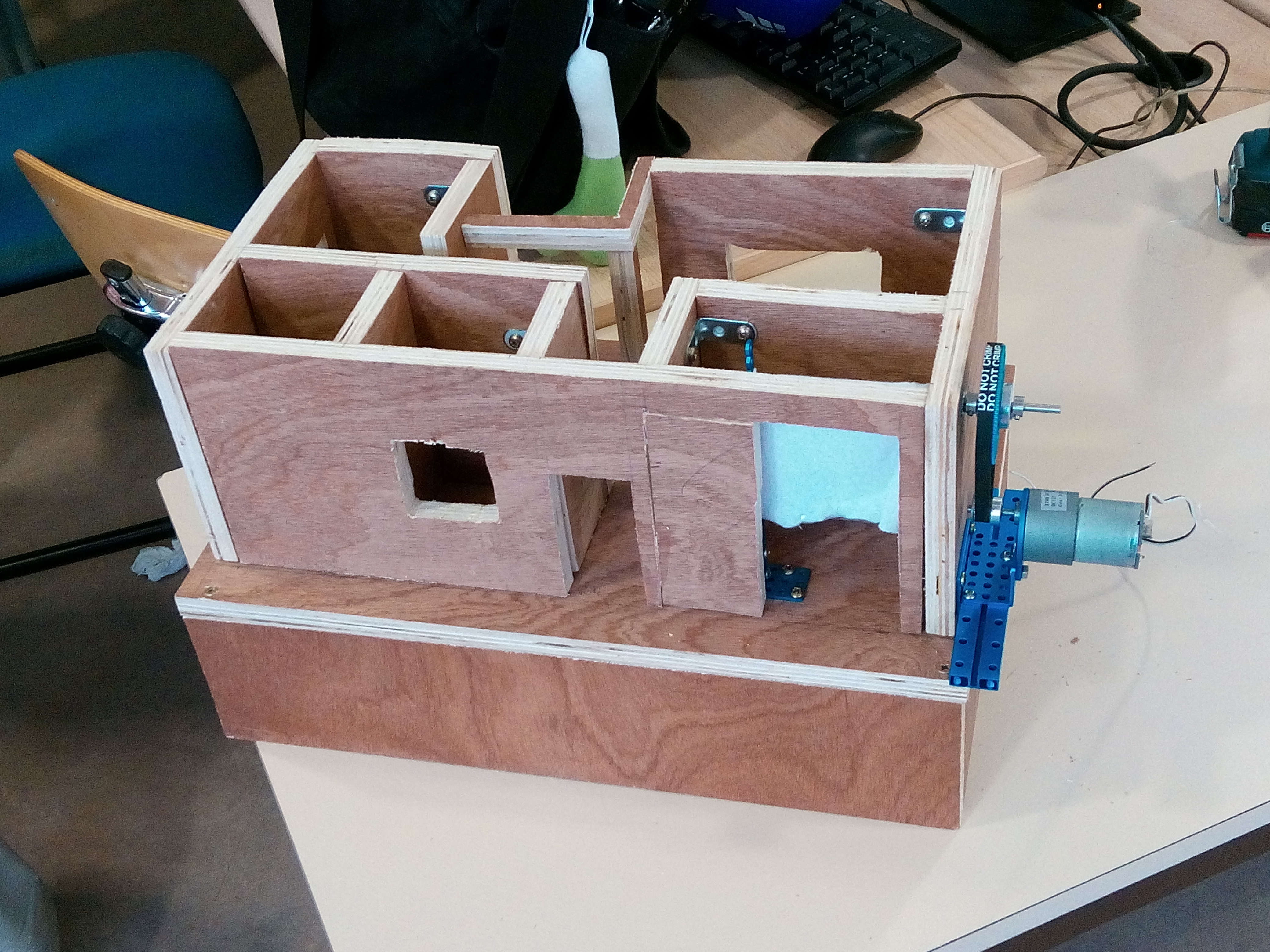
Rendu final de notre maison
Nous tenons à remercier notre encadrant de projet Mr. LAGRANGE ainsi que l’électronicien de l’école Mr. BOULJROUFI.
Pierre HESLON, Mickaël MENEUX, Antoine GODOF & Aymerick LOUBER