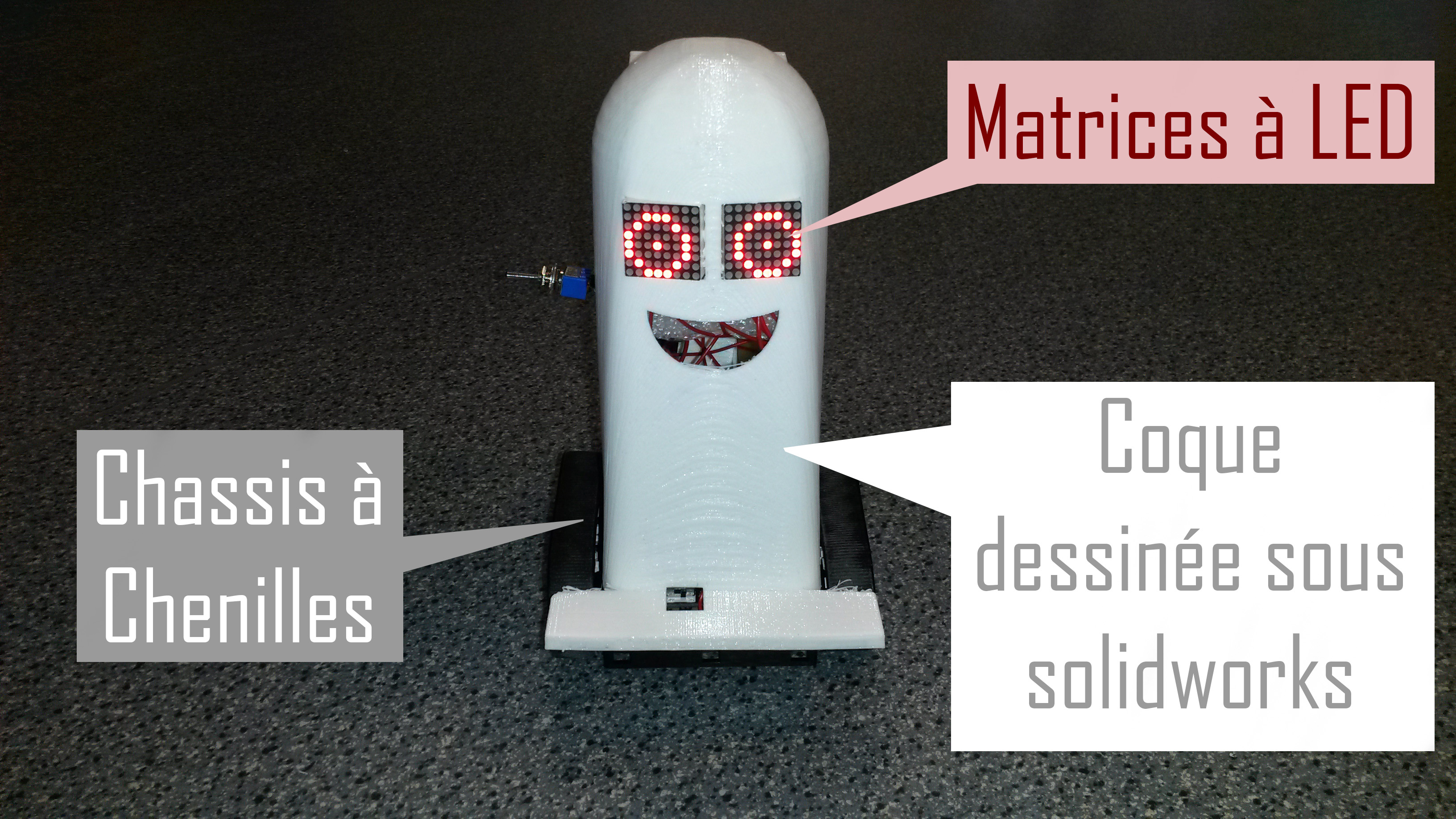
Nono le robot, tel est son nom ! Après 4 mois de durs labeurs il est enfin là ! Ce robot aura nécessité les compétences de 3 étudiants en cycle préparatoire de l’ISTIA. Mêlant des notions de cours telles que l’automatique, l’électricité, et l’innovation. Tout ceci intervient dans le cadre du projet robot portes-ouvertes. Nous l’avons pensé ensemble, préparé ses composants séparément pour ensuite penser à l’assemblage ensemble. Edouard CURE était chargé de monter ce qui allait être les « jambes » de Nono. Félix DELAUNAY et moi-même Aymerick LOUBER allions nous atteler à préparer les « yeux » de ce petit automate. Pour être plus précis Félix s’occupait d’une matrice à LED qui doit afficher des yeux et faire défiler le nom de notre école : ISTIA. Pour ma part je faisais tout ce qui était autour des capteurs infrarouges qui doivent permettre au robot de détecter le vide afin qu’il ne tombe pas de la table où il se déplacera. Pour ce qui est de son cerveau, nous avions choisi une carte Arduino Uno.
Côté programmation les instructions sont simples : Nono continue d’avancer tant qu’il est sur la table. Si ses capteurs détectent du vide il recule et fait demi-tour. La fonction forw() permet d’avancer et forward() fait accélérer le tout tant qu’il n’y a pas de vide . Une fois le vide rencontré la fonction stopped() arrête le robot puis back() et backward() font reculer. Enfin accelerationright() et fadeinright() permettent la rotation vers la droite.
Le robot continue ainsi tant qu’il est allumé.