Comment réaliser une maquette de parking autonome et adaptable ?
Cliquez sur le titre pour voir: Vidéo du compte rendu du projet.
Le choix du projet
Nous sommes deux étudiants à Polytech Angers, Ahmad IBRAHIM et Hakim BOUKDAIR. Nous avions pour but de réaliser un projet tout au long du 2ème semestre, en 100 heures de cours, de 2ème année à Polytech, ce projet validera ou non notre année. Nous avions le choix entre plusieurs projets mais celui-ci est celui qui nous as le plus intéressé car il alliait du codage, de l’électronique et de la réalisation 3D.
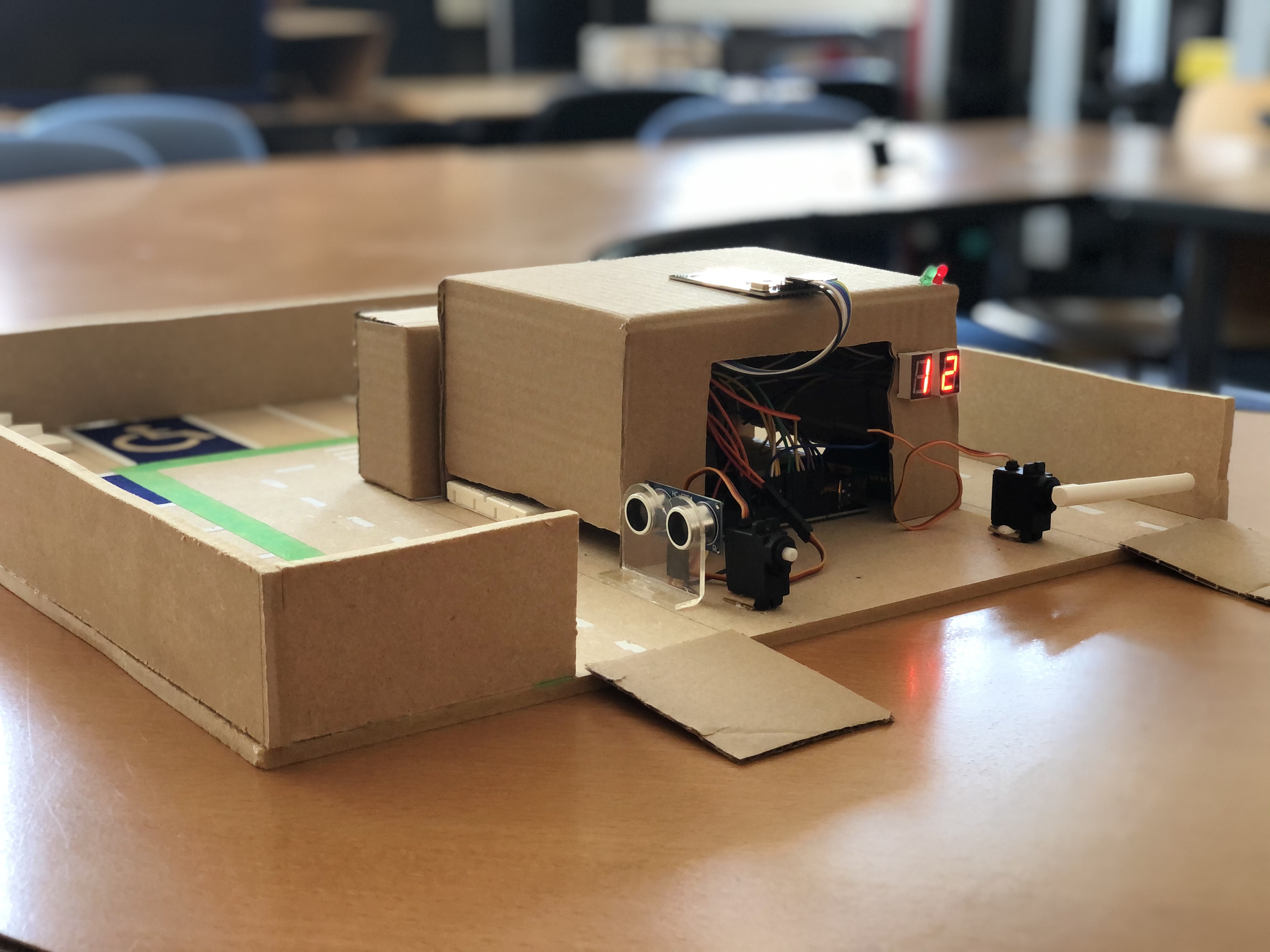
photo du parking obtenu
Le but du projet
Le projet consiste à réaliser un parking qui soit autonome et qui soit adaptable à taille réelle. Il faut que l’on puisse afficher le nombre de places disponibles et réussir à faire payer chaque voiture s’étant garé dans le parking en fonction du temps resté. La maquette réalisée devra être réutilisable par d’autres personnes et être autonome.
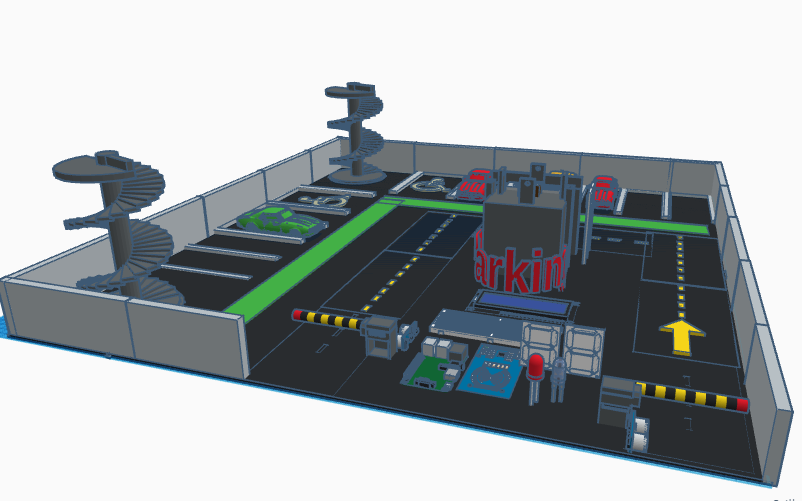
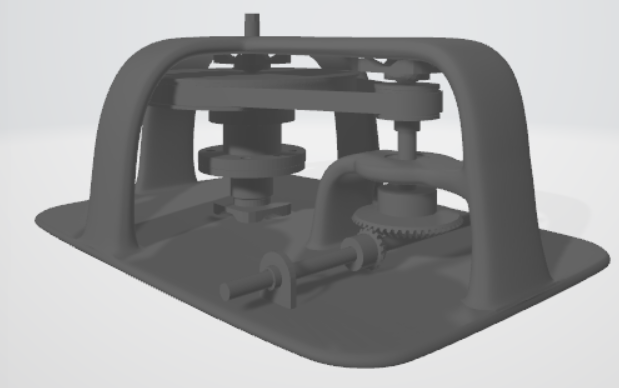
Modélisation de notre parking vue de face
Les différents logiciels
– Tinkercad : C’est un logiciel de modélisation 3D qui permet aussi de pouvoir coder en Arduino et de modéliser les différents circuits pour voir si les codes marchent. Ce logiciel nous as permit de pouvoir modéliser en 3D notre parking et de tester tous nos codes avant de les transférer sur la carte Méga. Le grand défaut de ce logiciel c’est qu’il n’était pas assez précis en termes de CAO pour pouvoir ensuite imprimer certaines pièces tel que les barrières ou les escaliers.
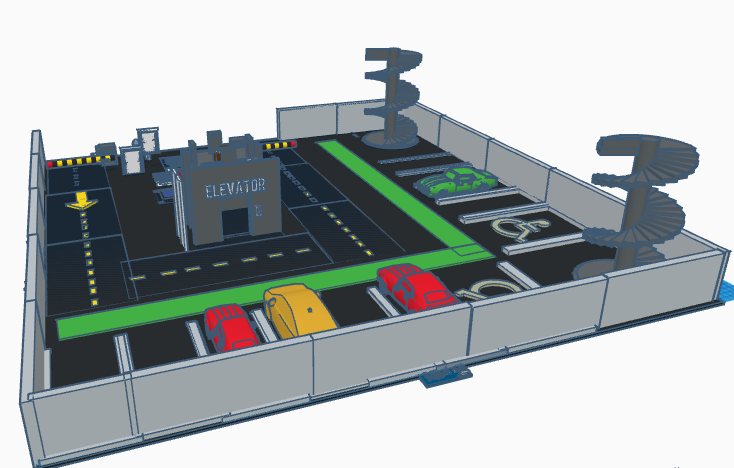
Modélisation de notre parking vu de derrière
– On Shape : On Shape est un logiciel de modélisation en CAO qui permet de créer des pièces en 3D pour ensuite les imprimer pour notre parking. Nous en avons eu besoin pour faire les deux escaliers, les deux barrières, les deux bras moteur, l’ascenseur et le boitier pour cacher l’électronique.
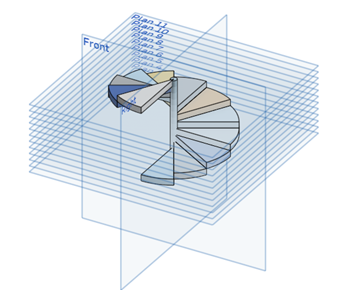
Escalier réaliser en CAO sur On Shape
– Arduino ide : C’est un éditeur de code qui permet d’envoyer plusieurs programmes sur une carte Arduino à travers un port USB. Ces cartes sont électroniques, elles sont composées d’un microcontrôleur, d’un port USB et de connecteurs d’entrés et de sortie. On peut programmer en C ou en C++ et il y a des fonctions à disposition pour lire des entrées et écrire sur des sorties. A partir d’une carte, nous pouvons gérer des moteurs, des capteurs, des systèmes d’affichage, … Dans notre cas cela permettra de coder tout le système de notre parking avec tous ces différents composants.
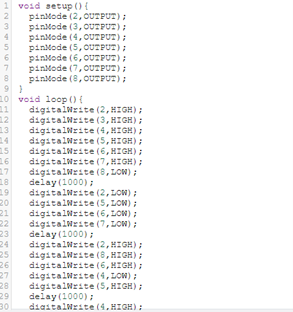
Code Arduino, ici pour faire fonctionner un afficheur à 7 segments
Ce que l’on a appris
– Nous avons tout d’abord appris à utiliser les différents logiciels. Nous ne connaissions ni Arduino, ni On Shape. Cela nous a permis de coder sur Arduino et de savoir créer un circuit électronique à partir de la carte. Avec On Shape nous avons appris à maitriser le CAO et savoir créer des pièces à imprimer en 3D.
– De plus nous savons maintenant passer des commandes, savoir chercher les références, gérer un budget et surtout rectifier quand il y a un problème. Ce qui sera utile pour nos futurs projets. C’était notre premier grand projet, sur une aussi longue durée, il a fallu savoir gérer le temps et les différentes tâches.

Exemple de pièce à commander, en gardant la référence
– Ensuite nous maitrisons le fait de bien travailler à deux, de savoir mettre ses idées en communs, se répartir les tâches en fonction du niveau de l’un et de l’autre. Aussi le fait devoir s’imposer un planning et de devoir le respecter fût une partie compliquer, ce n’était pas dans nos habitudes. Nous avons, par la même occasion, su prendre en compte les remarques de notre professeur référant pour pouvoir rendre notre projet le plus performant possible.
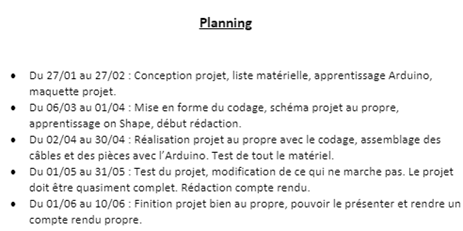
Notre planning simplifié du projet à respecter
– Enfin, nous possédions des contraintes pour réaliser ce parking que nous avons respectés. Tout d’abord le temps, comme dit précédemment, mais encore la contrainte pour la taille car il devait être adaptable à taille réelle, soit avoir une échelle pour faire la conversion facilement. De plus il y a des normes au niveau du parking qu’il faut respecter pour la taille des places handicapés par exemple. Toutes les contraintes n’ont pas pu être respectées du fait qu’il manquait déjà des pièces 3D, au niveau du codage nous n’avons pas réussis à rendre le parking payant comme voulu et pour finir le traçage du parking n’est pas aussi esthétique que nous le souhaitions.
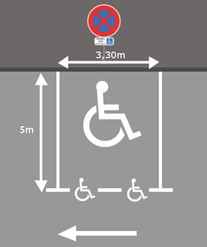
Place parking normé pour handicapé, https://www.bms-sols.com/marquage-sol-parking-regles/