
Bonjour à tous, je suis étudiant en deuxième année à Polytech Angers et mon projet de fin d’année a été de construire un boîtier de commande pour le robot Dobot Magician. Le boîtier a pour but d’être utilisé pour les travaux pratiques des étudiants de SAGI (Systèmes Automatisés et Génie Informatique). J’ai pour cela déjà à disposition un boîtier métallique vide, des interrupteurs et des LED.

Robot Dobot Magician
Communication avec le robot :
On peut connecter le robot à un ordinateur via un câble USB. Le constructeur fournit un logiciel « Dobot Studio » qui permet de programmer en python, les librairies (morceaux de code fournis par le constructeur) sont déjà installées et on peut faire bouger notre robot.
Le robot possède plusieurs connecteurs à l’arrière, certaines broches de ces connecteurs peuvent être utilisées pour envoyer du courant (peut allumer une LED) et d’autres mesurent si il y a du courant (sers d’interrupteurs).

Connecteurs Dobot Magician
Les montages suivants permettent respectivement d’allumer une LED et de détecter l’état d’un interrupteur.
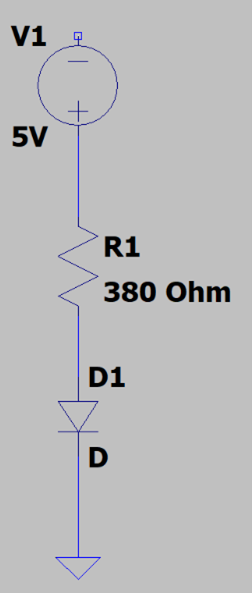
Branchement diode
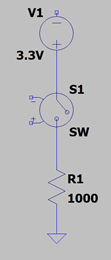
Branchement interrupteur
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
Construction du boîtier :
Le boîtier possède 4 interrupteurs et 5 LED. Pour les placer sur le boîtier j’ai percé les trous à la perceuse. Les interrupteurs tiennent au boîtier grâce à des écrous, les LED tiennent grâce à des supports en plastique. A l’arrière du boîtier il a fallu faire un trou rectangulaire, fait à la Dremel, pour faire passer le cable.
Les composants sont soudés à l’intérieur sur une plaque de soudure qui est elle-même collée à la glue dans le boîtier.

Boîtier de commande
Programme de démonstration :
Pour montrer comment fonctionne le boîtier et comment il peut être utilisé j’ai fait un programme de démonstration.
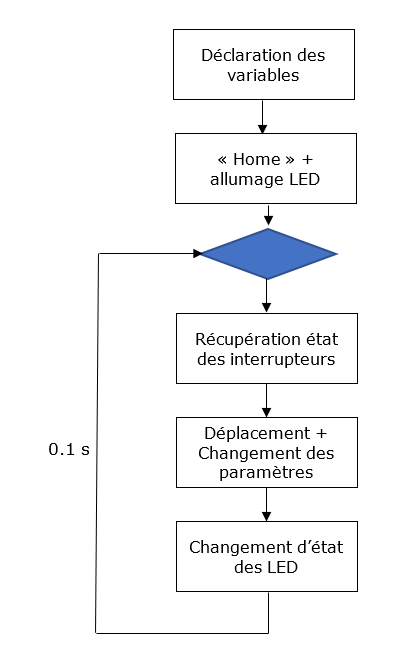
Diagramme fonctionnement du programme de démonstration
– Déclaration des variables : Initialise toutes ces variables, c’est ici qu’on déclare quelles broches sont des LED et quelles broches sont des interrupteurs.
– « Home » + allumage LED : Le robot lance une routine qui lui permet de bien placer son système de coordonnées. Pendant ce temps on allume les LED pour vérifier qu’elles fonctionnent.
– Récupération de l’état des interrupteurs : Stocke la valeur de chaque interrupteur dans une liste pour l’utiliser plus tard.
– Déplacement + Changement des paramètres : On fait faire ce que l’on veut au robot. Ici on déplace le robot entre plusieurs points et on change la manière dont il se déplace
– Changement d’état des LED : Allume ou éteint les LED si besoin
_
_
Démonstration :
Conclusion :
Le boîtier fonctionne, même si il reste encore beaucoup de choses à améliorer, notamment le câblage au robot qui est pour l’instant trop complexe pour être utilisé en TP. Ce projet m’a permis de me familiariser avec l’électronique et j’ai beaucoup apprécié programmer le robot.
Merci à Jean Louis Boimond, mon professeur référent qui m’a guidé durant ce projet, et à Franck Mercier pour m’avoir appris à souder.