Bonjour à tous et à toutes,
Nous sommes Chloé Creel et Maëlys Châtel-David, étudiantes en deuxième année de classe préparatoire à Polytech Angers. Lors de notre 4ème semestre, dans le cadre de notre formation d’ingénieur, nous avons réalisé un projet de conception dont le thème était l’innovation. L’objectif de notre projet était de lier la méthode de résolution TRIZ et le biomimétisme pour créer une base de données d’illustration. Mais qu’est-ce que TRIZ ou le biomimétisme, et en quoi cela concerne-t-il l’innovation ? Découvrons le maintenant.
1. Présentation du projet
Innover, inventer, l’être humain le pratique depuis peu, seulement quelques millénaires. Processus lent, créatif et complexe, l’innovation est primordiale dans nos vies, pour assurer notre survie et pour mieux vivre. De plus, aucun domaine n’est épargné par l’innovation, que ce soit dans la médecine, les transports, la communication ou encore l’énergie, chaque domaine innove, en particulier s’il fait appel à des ingénieurs, puisque l’innovation est au cœur de leur métier.
C’est pour aider les chercheurs et les ingénieurs à innover que la méthode TRIZ a été créée. Inventée par Genrich Altshuller en 1946, TRIZ (acronyme de Théorie de Résolution des Problèmes Inventifs, venant du russe Теория Решения Изобретательских Задач) est une méthode pour résoudre des problèmes d’innovation technique. Il y a en tout 40 principes TRIZ et une matrice permet de déterminer quel principe est le plus adapté à chaque problème posé. TRIZ permet de guider les ingénieurs vers des solutions astucieuses et facilement réalisables.
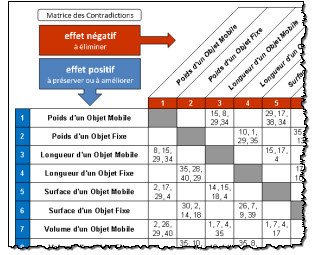
Premières lignes et premières colonnes de la matrice TRIZ
© https://www.180-360.net/10-questions-triz
Cependant, dans le contexte actuel de protection de l’environnement, les méthodes d’innovation évoluent, et une d’elles est la copie de la nature. C’est ce qu’on appelle le biomimétisme. Théorisé pour la première fois par Leonardo Da Vinci au XVème siècle, le biomimétisme est un sujet dont on entend actuellement beaucoup parlé. S’inspirant de la nature qui innove depuis 4.8 milliards d’années, le biomimétisme s’inscrit dans l’efficacité optimale et dans le développement durable. En effet, comme la nature qui fonctionne sur un principe d’économie et qui ne génère aucun déchet, l’objectif du biomimétisme est de concevoir des produits durables, qui “créent des conditions propices à toutes les formes de vie.” (J.BENYUS). Le but est de s’inspirer, voire de copier les solutions développées par la nature dans les problématiques d’ingénierie ou autre.
Le but de notre projet était de lier biomimétisme et principes TRIZ. Nous devions créer une base de données d’illustrations de chaque principe inventif TRIZ sous forme d’une fiche par principe. L’objectif était que pour chacun des quarante principes TRIZ, nous trouvions des illustrations issues du biomimétisme.
2. Travail réalisé
a. Recherches
Avant de commencer à créer notre base de données, nous devions faire un travail préliminaire de recherches sur TRIZ, pour comprendre les principes et toutes leurs subtilités. Puisque la méthode TRIZ vient de l’Union Soviétique, les définitions que nous avions à disposition étaient les traductions françaises, qui étaient des traductions de définitions anglaises, elles-mêmes traduites du russe. Nous avons, en accord avec notre encadrant Mr. P. Crubleau, traduit nous-mêmes les définitions anglaises pour les réécrire avec nos propres mots, plus “simples”.
Après ce long travail de compréhension des principes TRIZ, nous avons dirigé nos efforts sur le contenu de notre base de données, et donc sur les recherches d’illustrations issues du biomimétisme.
Avec cinquante-deux heures de recherches à notre actif, nous avons réussi à établir le système qui fonctionnait le mieux. Le plus dur était de trouver de nouveaux exemples de biomimétisme, car les mêmes exemples revenaient souvent dans beaucoup d’articles. Par exemple, le train Shinkansen, le velcro ou le Geckskin sont des innovations issues du biomimétisme qui ont déjà fait leurs preuves depuis de nombreuses années et qui, par conséquent, sont très souvent présentées dans les ressources existantes sur le biomimétisme.
Nous avons donc rapidement voulu nous détacher des exemples plus traditionnels – même si ils sont intégrés à notre base de données -, puisque notre objectif était de couvrir le plus de principes possibles. Nous avons donc essentiellement essayé de trouver des ressources contenant plusieurs dizaines d’exemples à la fois, voire plus, bien que leurs explications soient de ce fait moins détaillées, et de trier sur le volet en faisant des recherches plus approfondies en parallèle. Les résultats de cette approche étaient positifs, puisqu’au moment de l’écriture de cet article, notre base de données contient 79 exemples, répartis sur 36 principes différents.
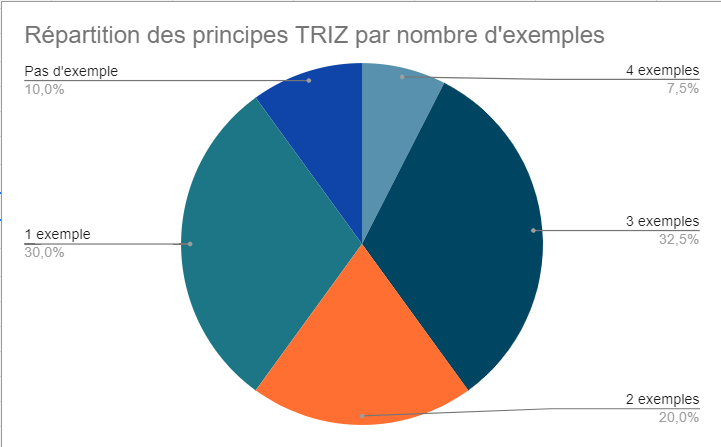
Graphique circulaire de la répartition des principes TRIZ en fonction du nombre d’exemples
Même si, au cours de nos recherches, nous avons pu faire face à plusieurs déceptions en raison d’exemples qui ne relevaient finalement pas du biomimétisme, nous avons trouvé que cette méthode était la plus efficace.
De plus, nous enrichissons la base initiale de 4 principes supplémentaires qui ne se classent dans aucun des principes TRIZ. Nous avons longuement débattu pour savoir s’il était pertinent d’intégrer les exemples « sans TRIZ » que nous avions trouvés, jusqu’à ce que notre superviseur, Mr. Pascal Crubleau, nous convainque qu’il s’agissait d’une richesse plutôt qu’une faiblesse du projet et que nous devrions même l’exploiter afin de pouvoir ouvrir un débat sur la pertinence des quarante principes existants. Nous les avons dénommés en fonction des actions qu’ils effectuaient. Ces illustrations démontrent que cette base de données peut et doit évoluer pour suivre l’évolution des connaissances.

Les “Sans-Triz” : principes que nous avons inventé
b.Mise en forme sur Notion
Notre base de données se trouve sur le site américain Notion. Disponible en français et en anglais, elle est divisée en quarante et une catégories dans les deux langues. Les quarante premières catégories correspondent aux quarante principes TRIZ de la méthode et la dernière correspond aux « hors TRIZ ».
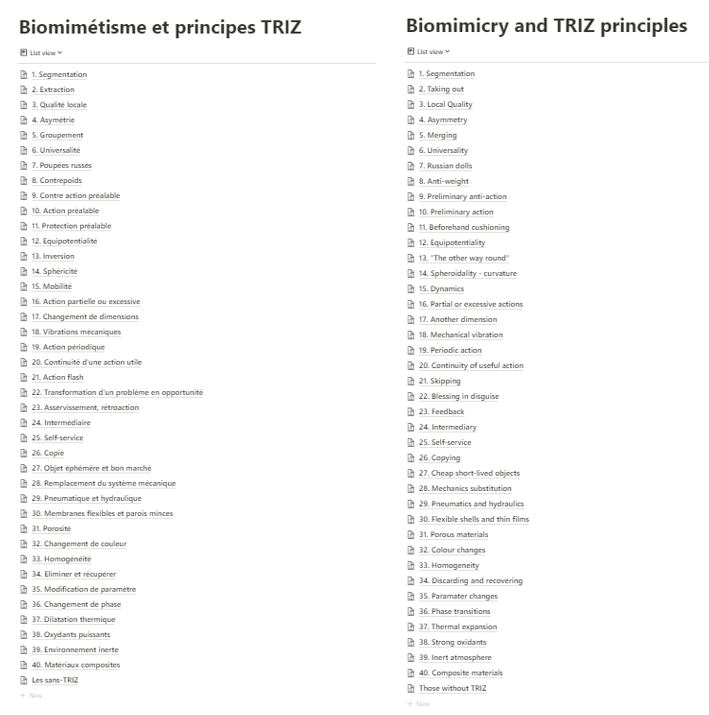
Base de données en français et en anglais (41 catégories/fiches)
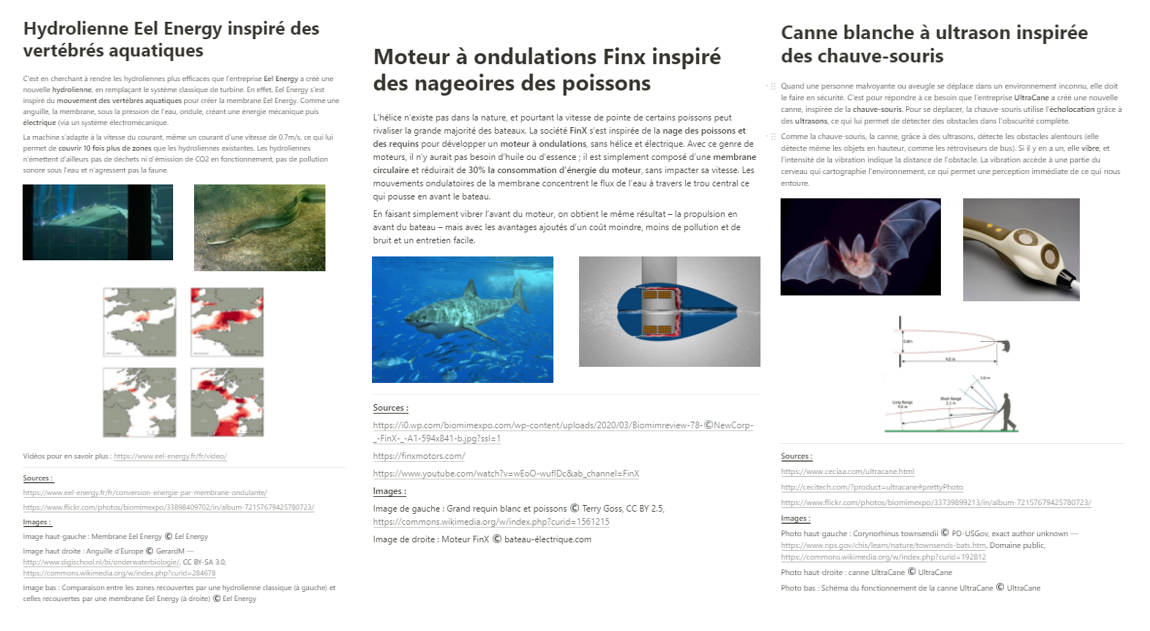
Chaque catégorie mène à une définition du principe et aux exemples biomimétiques trouvés. Nous avouons que les exemples ne sont pas répartis uniformément, puisque certains principes sont illustrés avec un exemple alors que d’autres avec quatre. Chaque illustration est cependant explicitée, pour permettre à l’innovateur de s’en inspirer. Ainsi, chaque exemple explique le phénomène naturel qui a inspiré l’innovation et comment l’entreprise ou l’inventeur s’en est servi.
Par exemple, prenons le principe 18 de la matrice TRIZ : Vibrations mécaniques. Au fil de nos recherches, nous avons trouvé 3 exemples issus du biomimétisme qui illustrent le principe de “Vibrations mécaniques” : un moteur à ondulation inspiré des nageoires des poissons, une hydrolienne inspirée des anguilles et une canne blanche à ultrason inspirée des chauves-souris. Chacun des 3 exemples est vérifié par plusieurs sources différentes, présente des photos d’illustration ainsi qu’une explication claire et rapide de son inspiration naturelle, de son utilisation ainsi que de son lien avec le principe TRIZ.
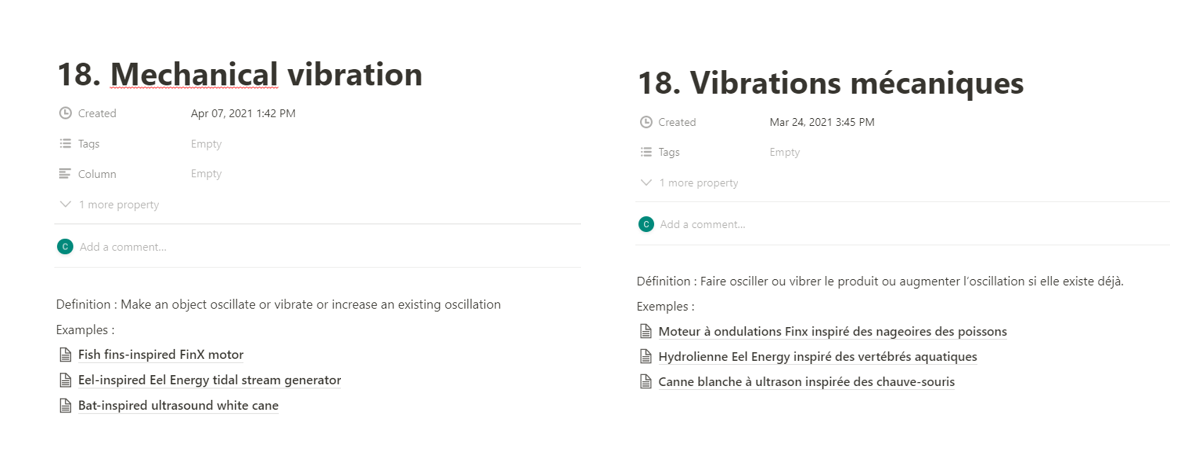
Principe 18 “Vibrations mécaniques” (en anglais et en français)
Illustrations issues du biomimétisme du principe 18 “Vibrations mécaniques”
Nous avons fait le choix de traduire tout notre projet en anglais, afin de le rendre accessible à un public plus large (et pas uniquement francophone) et pour le diffuser plus facilement. Cette base de données s’adapte ainsi à un public international.
Voici le lien de la base de données : Base de données Projet Biomimétisme
3. Conclusion
Pour conclure, ce projet a demandé beaucoup de travail de recherche et de découverte. Mais il s’est révélé très intéressant et motivant. Le thème du biomimétisme nous a donné envie de travailler sur ce projet et nous ne le regrettons pas.
Notre base de données est conforme au cahier des charges et nous sommes toutes deux très satisfaites du résultat final.
Ce fut enrichissant, à la fois sur l’aspect intellectuel et humain. Nous avons beaucoup appris sur le biomimétisme et sur la création d’une base de données. De plus, la découverte de la méthode TRIZ a été intéressante.
Nous tenons à remercier notre professeur encadrant Mr. Crubleau pour toute l’aide apportée tout au long du projet.
Merci d’avoir lu notre article.
Par Chloé Creel et Maëlys Châtel–David