Nous sommes un groupe de trois étudiants et dans le cadre de la 2ème année du cycle préparatoire de l’IstiA, nous avons dû choisir un sujet parmi ceux proposés pour notre projet tuteuré.
Étant intéressés par le côté programmation informatique, notre choix s’est naturellement porté vers le projet nommé « Développement d’un jeu vidéo interactif simple » (et puis on aime bien jouer aussi).
Ok , c’est bien beau tout ça, mais c’est quoi un « jeu vidéo interactif simple » ?
Le concept n’est pas compliqué : on prend un jeu vidéo simple, simple dans le sens facile à comprendre et rapide (une partie peut durer quelques minutes pas plus). Et au lieu d’avoir une manette ou un clavier/souris pour contrôler, on utilise le principe de la kinnect ou de la wii c’est à dire que c’est un mouvement de notre corps qui va provoquer un effet dans le jeu. En gros quand on bouge : on joue et comme tout est basé sur la simplicité pas besoin de breakdance, juste quelques mouvements de bras ou quelques pas suffiront.
Ouais, on a compris le principe, mais t’as pas quelques exemples à nous proposer ?
L’association Battle Interactive propose des animations à base de jeux interactifs pour foules lors de soirées ou autres événements.
Source : http://www.battleinteractive.fr/
On peut observer dans cette vidéo des jeux comme un pong ou un casse brique mais la façon de jouer n’est pas ordinaire. Pour le pong par exemple on voit des groupes de personnes, portant une barre, avancer et reculer. En se déplaçant, la barre du pong bouge également : elle suit le mouvement du groupe de personnes. Le jeu est simple, rapide et amusant tout de même.
Il existe bien sûr des multitudes de jeux possibles et avec plein de différents mouvements possibles pour jouer. Libre à votre imagination de les inventer.
Cool, et votre projet dans tout ça ?
Dans notre jeu, on joue une petite boule et le but est d’éviter des carrés qui se baladent sur l’écran et rebondissent sur les côtés, plus on reste en vie plus le nombre de carrés grandit.
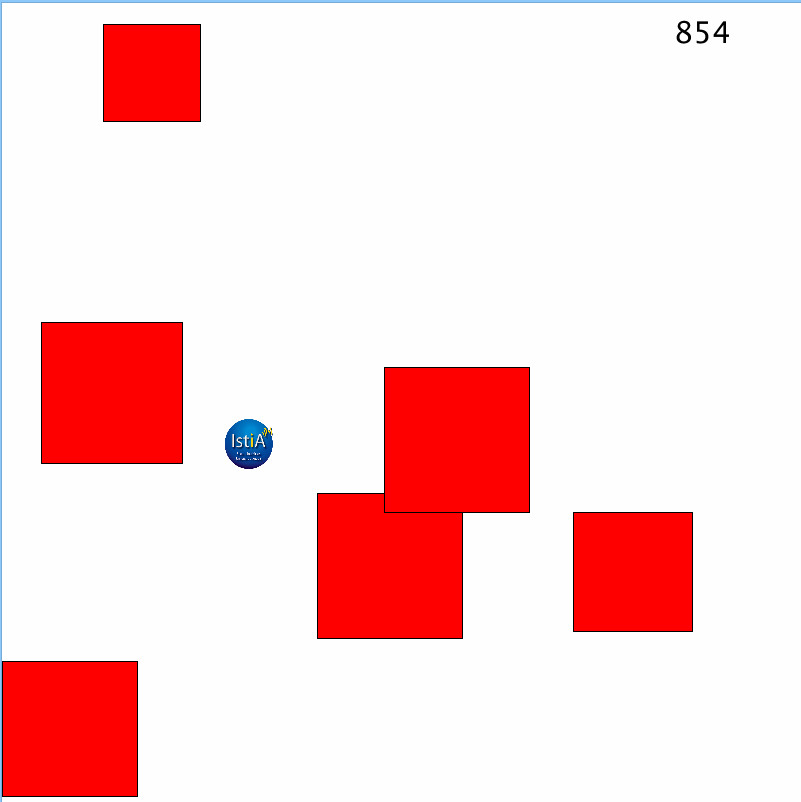
Oui c’est un peu sobre, même pas très joli.
La petite boule bouge non pas avec la souris ou avec les flèches directionnelles mais comme dans la photo ci dessous grâce à un mélange de cerceau et de polystyrène. Le but étant de tenir le cerceau/polystyrène (à plusieurs) et selon l’inclinaison qu’on lui donne par rapport à l’horizontale, la petite boule se déplace.

Pas très esthétique mais ça fonctionne et c’est fun en plus !
Le jeu à été programmé sous processing. Le capteur utilisé pour actualiser la position dans le jeu grâce aux mouvements est un accéléromètre. Deux cartes arduinos communicant sans fil grâce à un module radio 434MHz ont été utilisées pour récupérer les données du capteur et les transmettre à l’ordinateur.