Notre projet s’intitule “boîte à histoires”. Une boîte à histoire est un objet destiné aux enfants qui raconte des histoires préenregistrées adaptées pour le développement de l’enfant. Il existe toutes sortes de boîtes à histoires sur le marché, l’objectif du projet est de concevoir de A à Z une boîte à histoire à prix équivalent de ce qui existe sur le marché. En plus, nous devions trouver un moyen d’ajouter facilement des histoires avec un câble USB.
Durant les 100 heures de projets, nous avons découvert le monde de l’électronique, nous avons pu faire de la soudure, de la programmation, de la recherche d’information sur des composants, une prise en main de logiciels comme EAGLE, de la conception CAO…


Déroulement du projet
Le projet s’est déroulé en plusieurs étapes pour arriver à la construction finale de la boîte à histoire. La première est la recherche des composants dont nous avions besoin pour faire fonctionner la boîte et la découverte de l’Arduino.
1) Recherche des composants de la boite et la découverte de l’Arduino
Tout d’abord, comme nous partions de zéro, il fallait faire des recherches sur les composants qui nous seraient utiles pour la conception de la boite à histoire. Pour commencer, nous avons fait des recherches et testé des shields que nous avions déjà à l’école. Ensuite, nous avons commandé le matériel qui nous manquait pour construire la boite à histoire. Nous avons testé tout les shields séparément avant de les combiner ensemble.
C’était assez fastidieux car nous ne savions même pas si c’était possible de fabriquer une boîte à histoire avec Arduino.

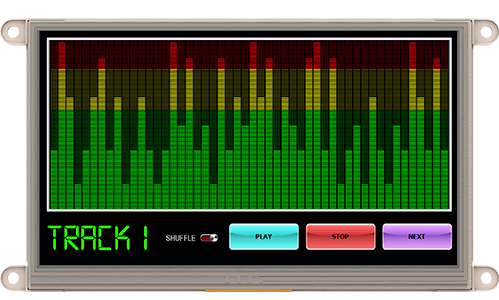
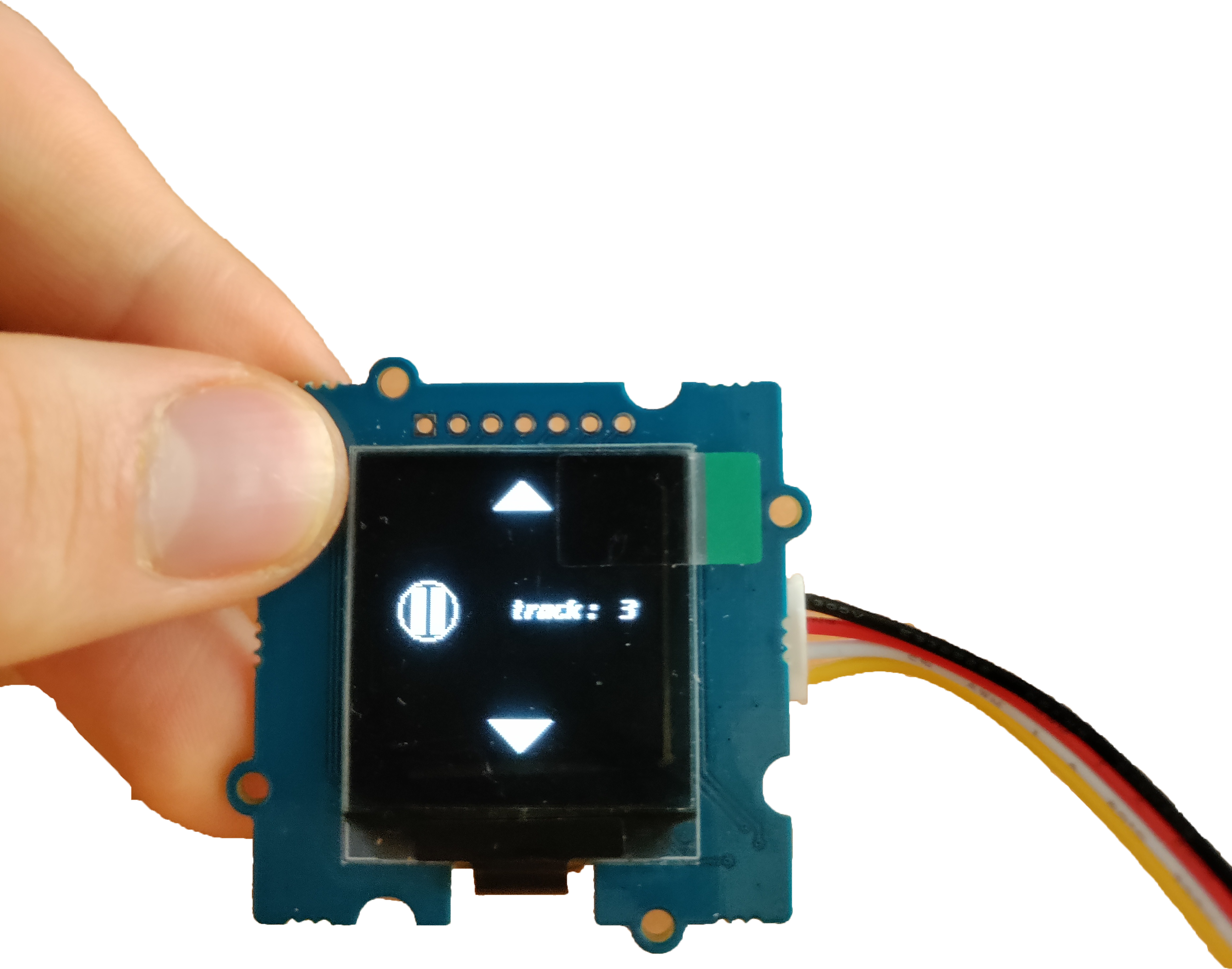
Au départ, nous avons essayé un écran de 128*128 pixel. Il allait servir d’écran d’information pour la sélection des histoires. Nous avons réussi à créer une interface correcte pour l’Arduino. Nous lui avons aussi créé un logo pause pour qu’il change en fonction d’un bouton.
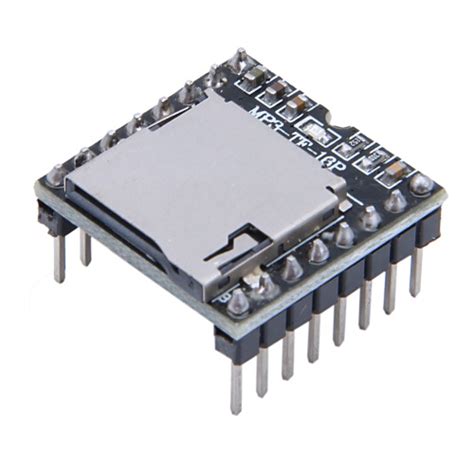
Ensuite, nous sommes passés sur la programmation du son. Nous avons testé au départ un shield “Music Maker” qui contenait une carte SD. Le son marchait bien, cependant nous n’avons trouvé aucun moyen d’accéder à la carte par USB. Cela nous a obligé à changer des composants et d’utiliser un DFplayer, un module mp3 pour Arduino. Ce qui nous intéressait dans le DFplayer était sa connexion USB+ et USB-. Cela nous a permis d’accéder facilement à la carte SD sans l’enlever.
Après nous avons enchainé par à la programmation des boutons. Nous avions besoin de 5 boutons :
- un bouton avancer et un bouton reculer, ils servent à changer de musique. Le numéro de la musique sera modifié après l’appui sur un des 2 boutons.
- un bouton pause, un appui met la musique en pause et l’écran change son affichage. Un second appui relance la musique et change l’interface de l’écran.
- un bouton qui augmente le son et un qui le baisse, ces deux boutons sont tous les 2 responsables du volume. Nous aurions pu utiliser un seul bouton rotatif.
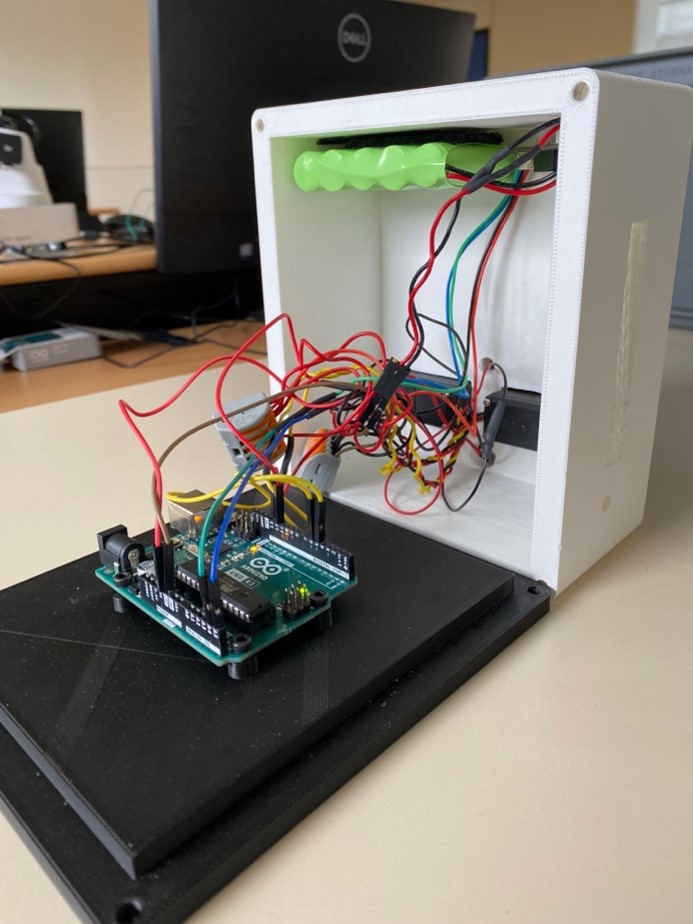
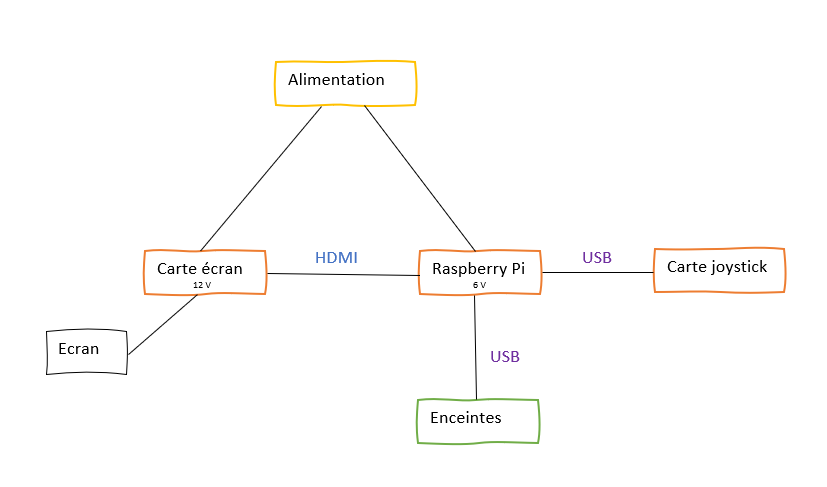
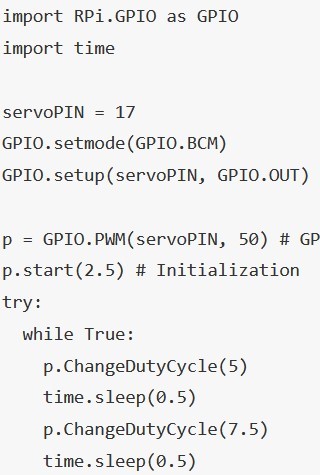
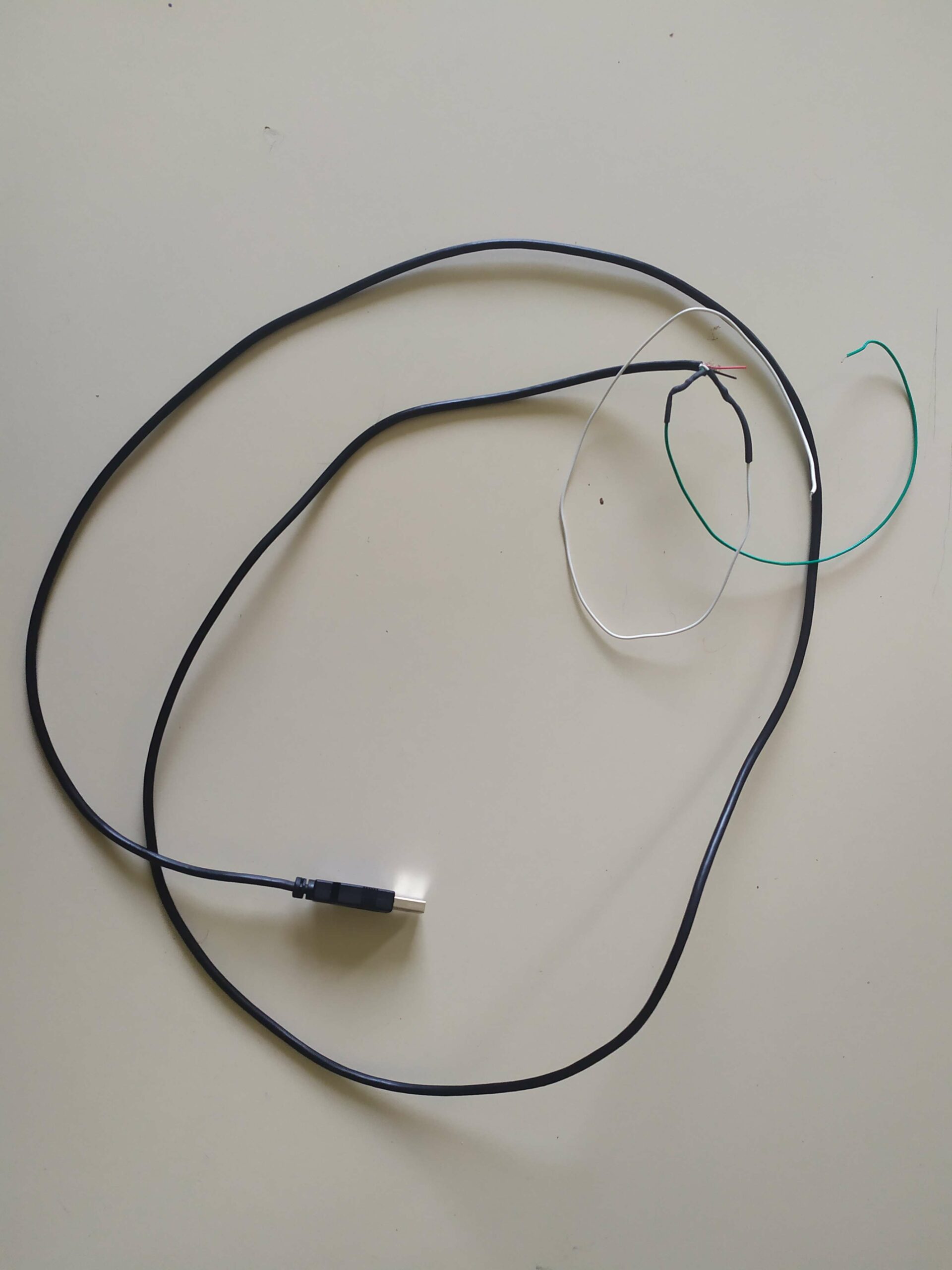
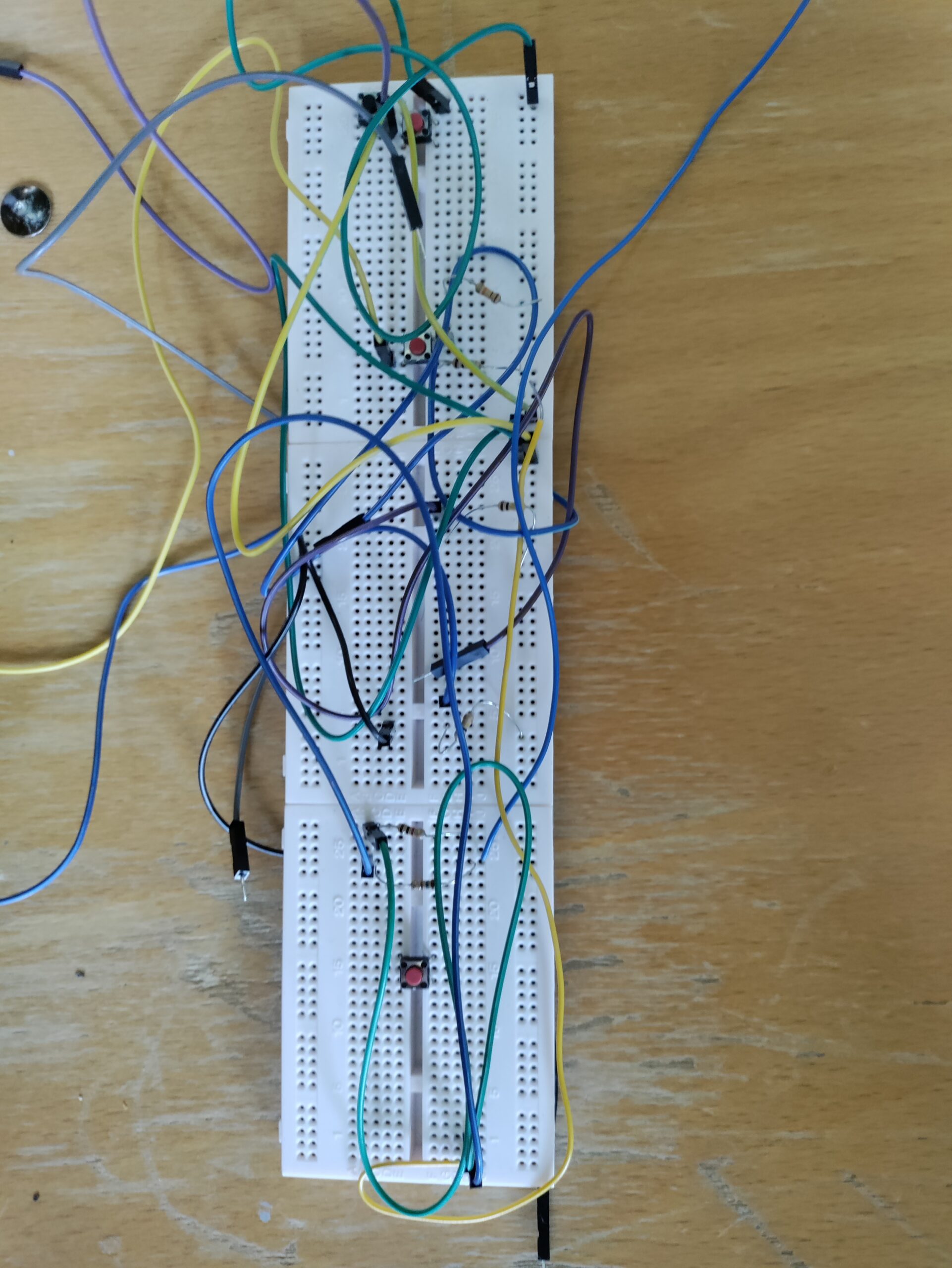
Une fois cette étape de test terminée, nous avons combiné tous les programmes ensemble pour en former un seul (dont on vous épargnera le contenu) . Nous avons utilisé un breadboard pour placer les boutons et le DFplayer. La connexion USB pour modifier les fichiers à l’intérieur de la carte SIM du DFplayer était faite grâce à une câble USB dénudé. C’est à ce moment-là que nous avons pu voir si le projet était faisable sur Arduino. Étonnement, la connexion par USB fonctionnait, et les boutons aussi.
2) Impression du shield Arduino
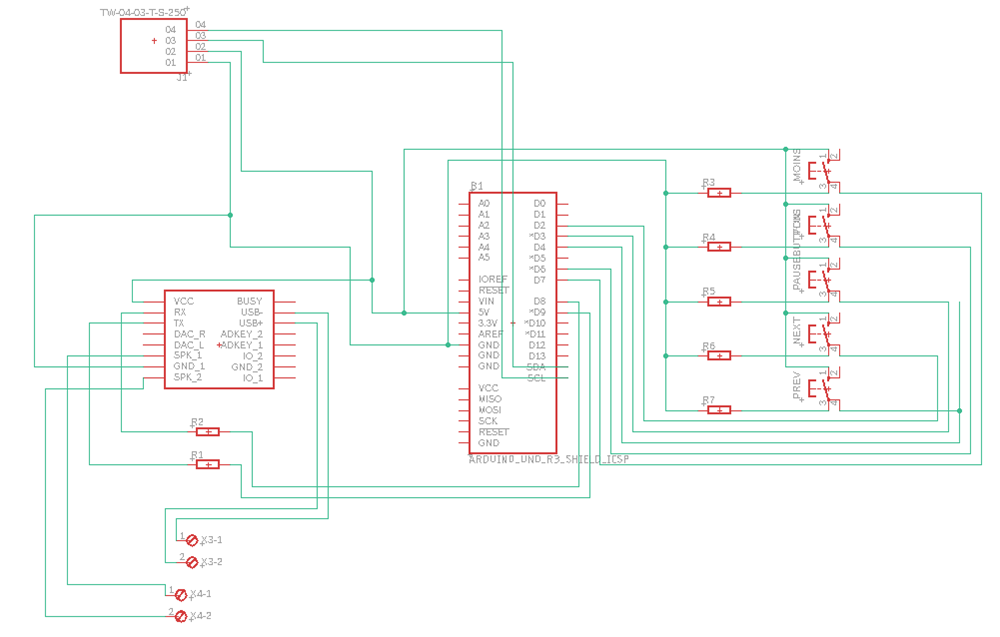
La première étape était terminée, la seconde était de transformer l’amas de fils présent sur le breadboard en une carte électronique. Nous avons utilisé le logiciel EAGLE pour créer la carte sur mesure.
Pour imprimer la carte, il faut tout d’abord importer les composants et faire leurs liaisons sur la partie “shematic” d’EAGLE. C’est assez long car il faut retrouver la référence de chaque composant que l’on veut ajouter
Une fois la partie “shématic” faite, nous passons à la partie “ bord” du logiciel. Cette partie a pour objectif de reproduire les mêmes liaisons entre les composants que celles présente lors de l’impression. Nous ne pouvons pas croiser les fils de la carte contrairement à la partie “shématic”.
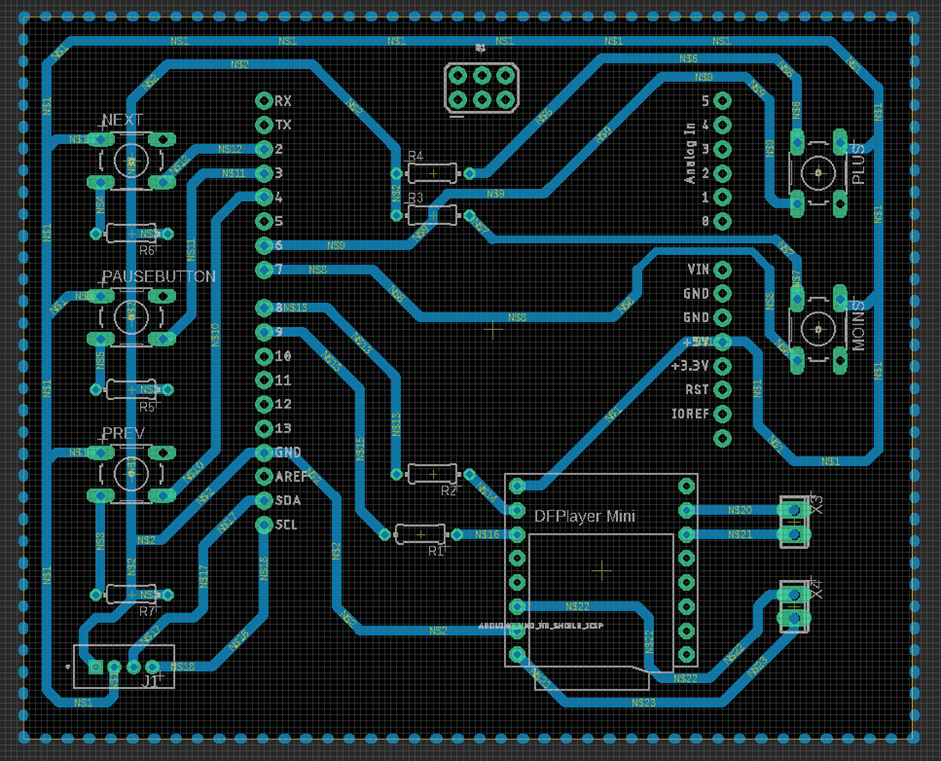
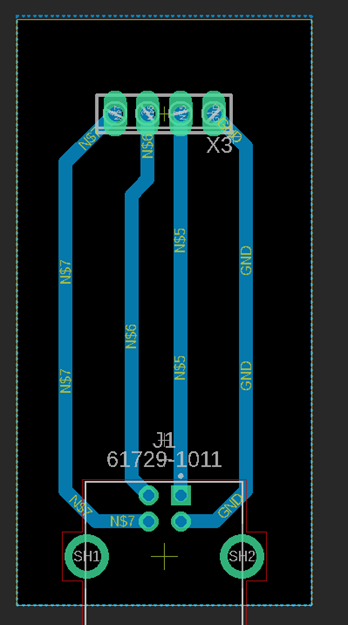
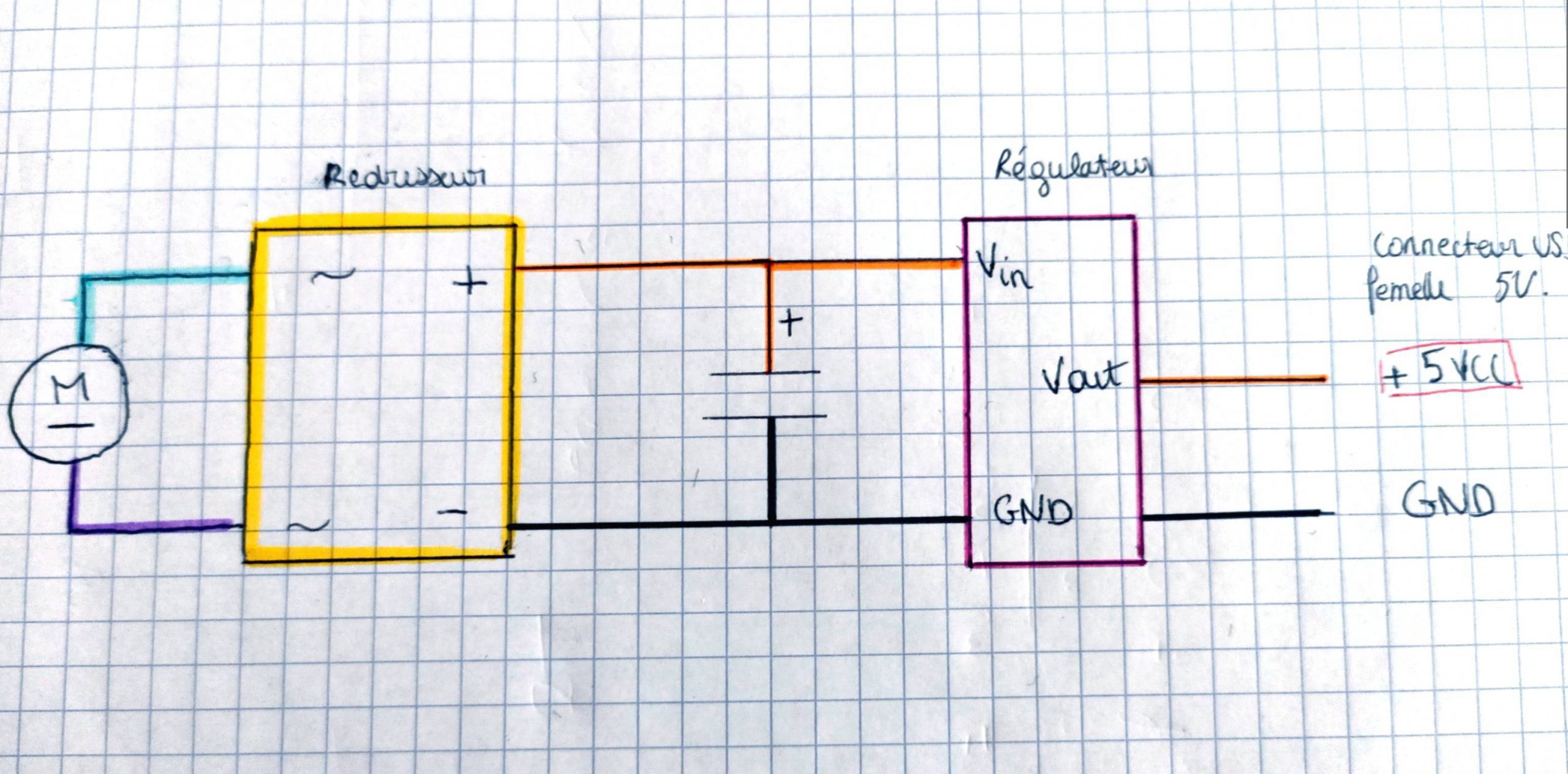
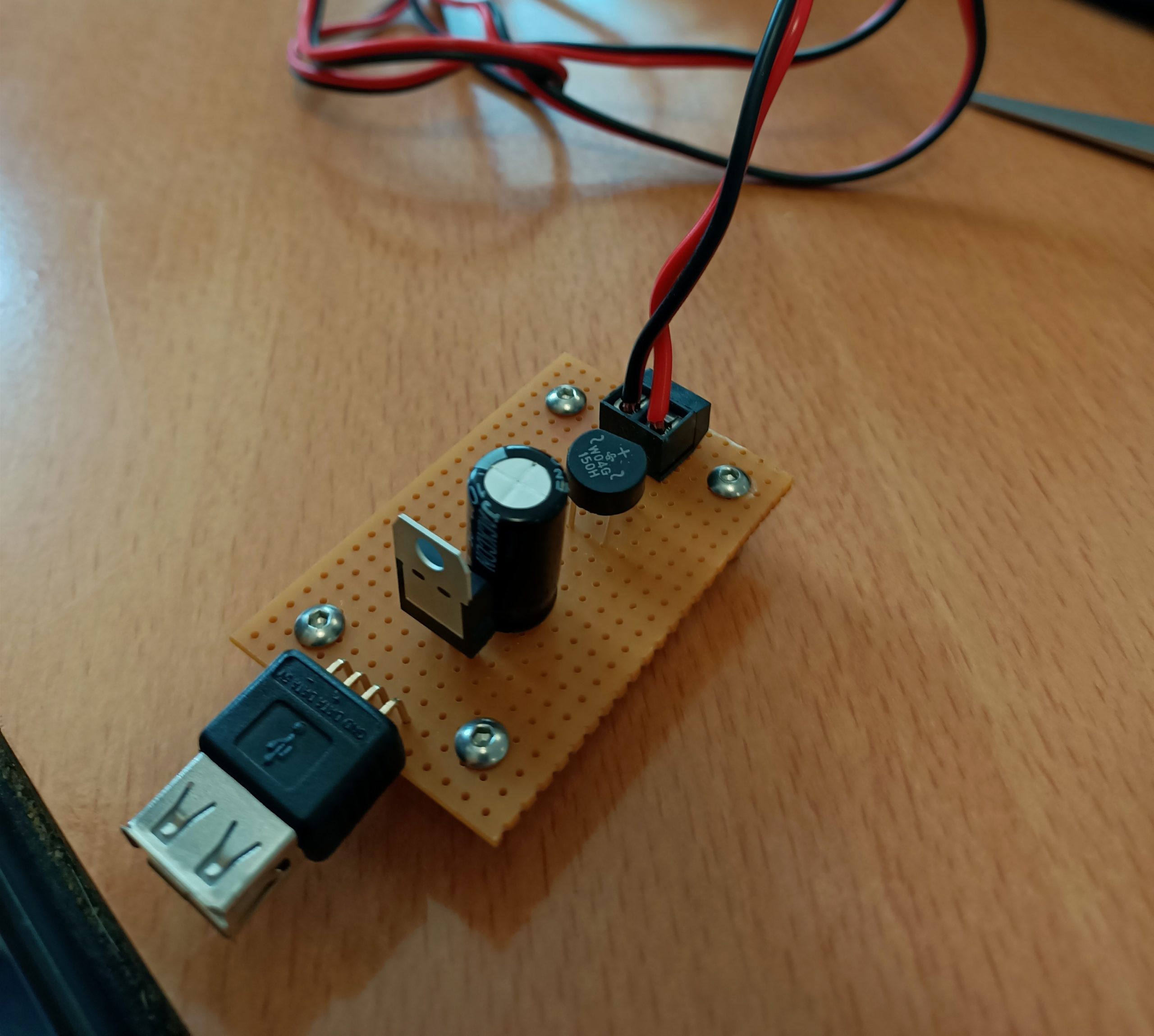
Nous avons eu besoin de faire 2 prototypes pour que la carte marche entièrement. Avec cette carte, nous avons aussi imprimé une petite carte qui servira d’entrée USB. Le VCC, le GND, le USB+ et USB- seront récupérés par des borniers à vis au bout de la petite carte.
3) La batterie
La dernière étape pour avoir un objet fonctionnel était l’ajout de la batterie. La boîte à histoire doit être transportable, il nous faut donc une batterie rechargeable pour assurer son fonctionnement. Nous avons utilisé un shield arduino batterie ainsi qu’une batterie de 3.7 volt et de 1.2 Ampères. La batterie est rechargée par un connecteur micro USB.

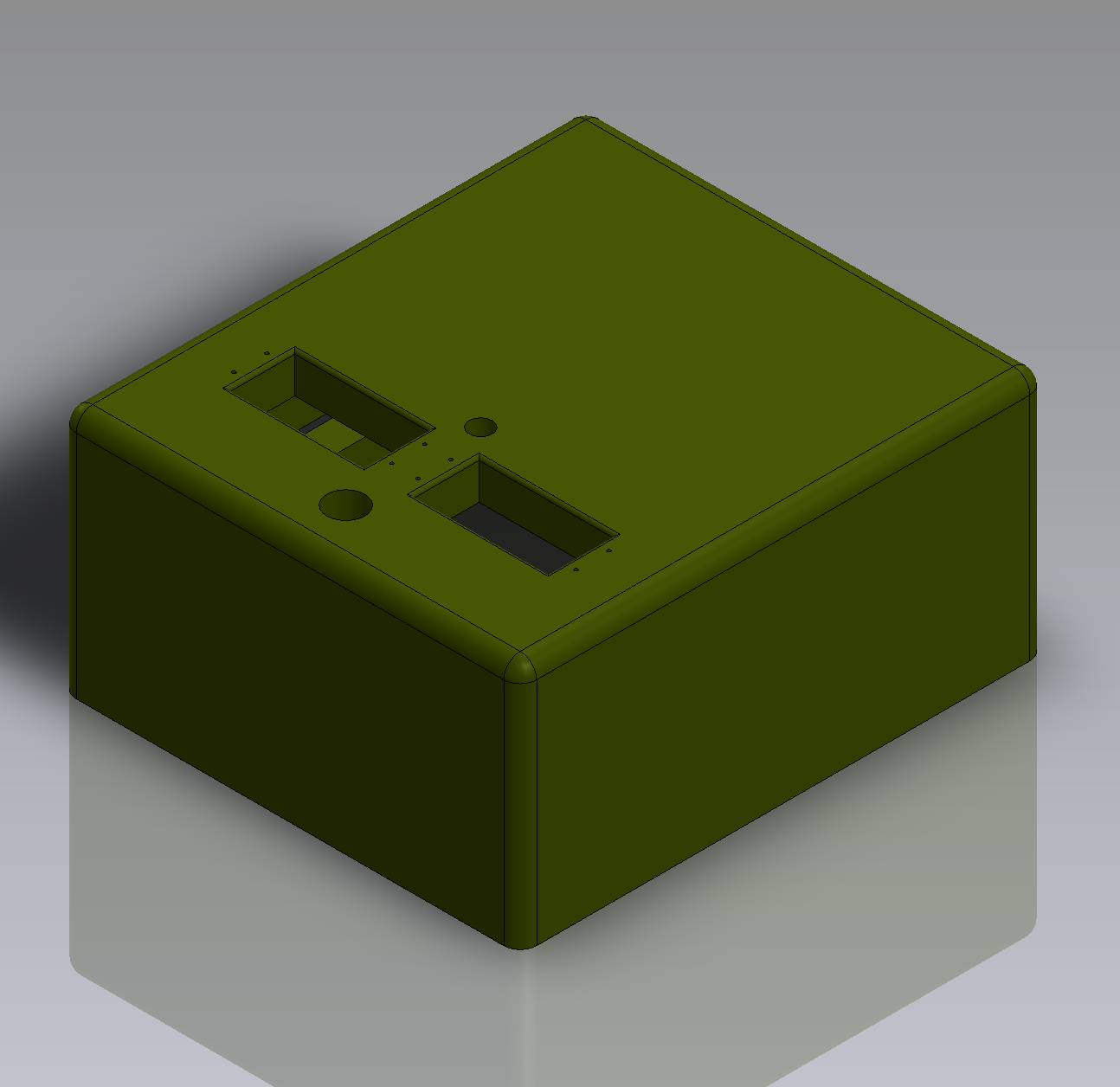
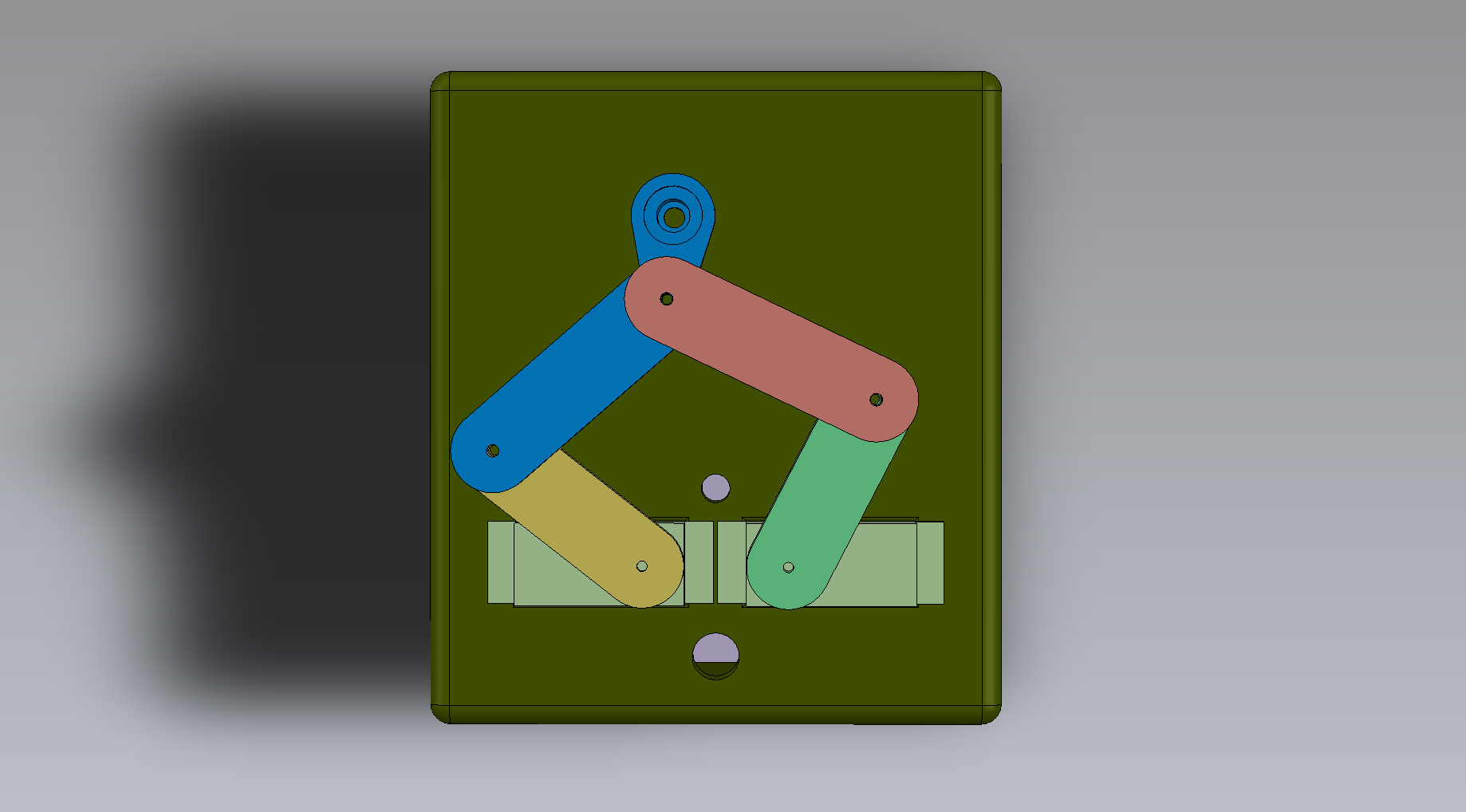
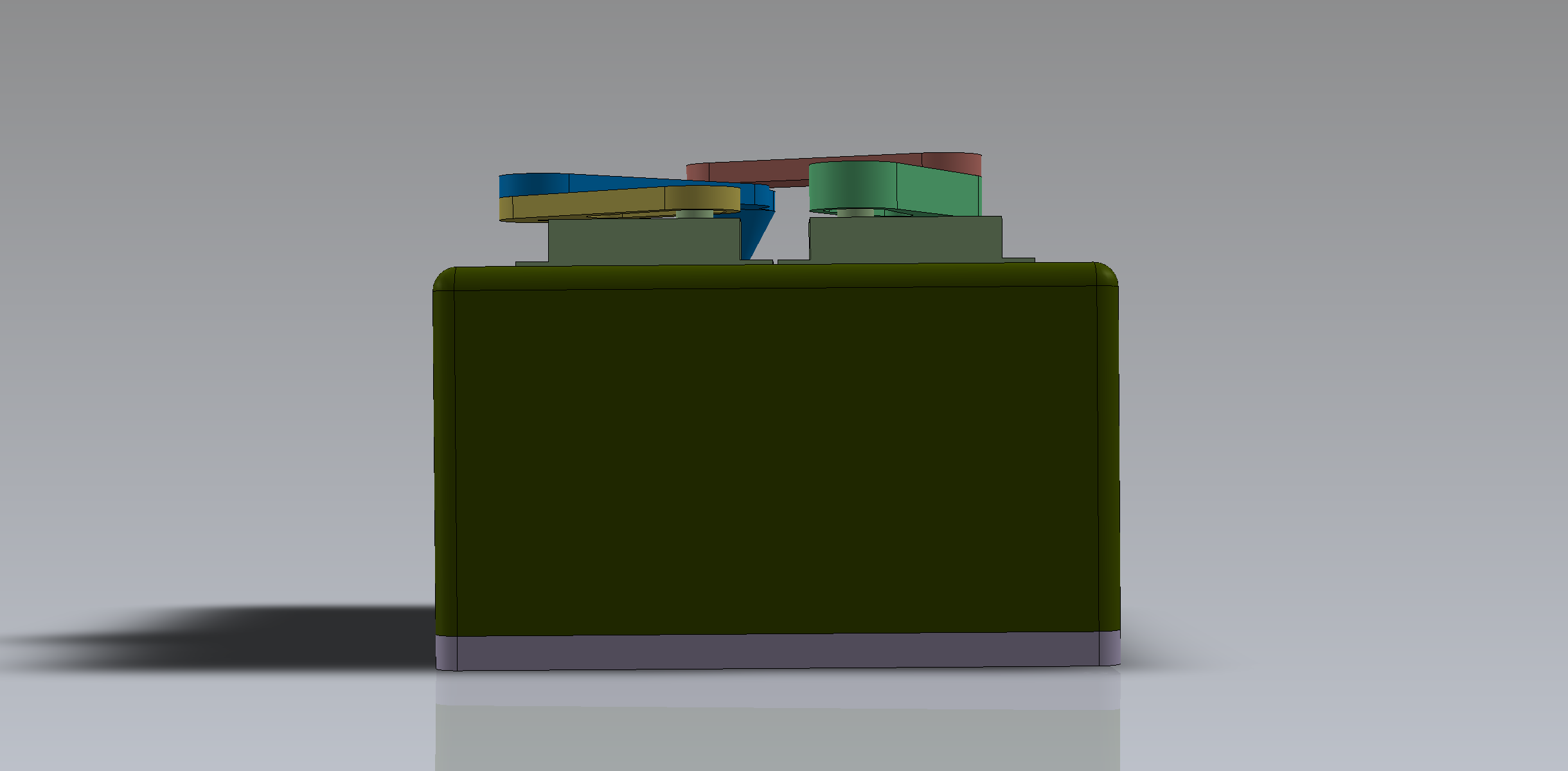
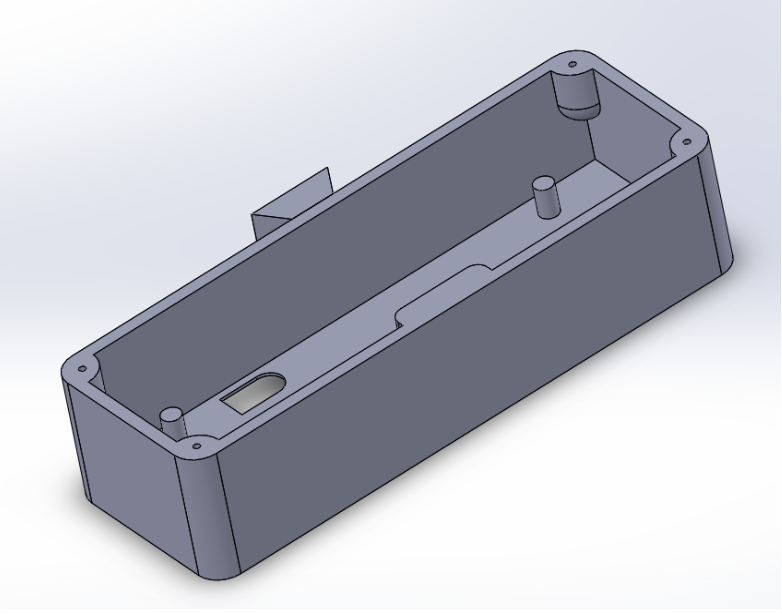
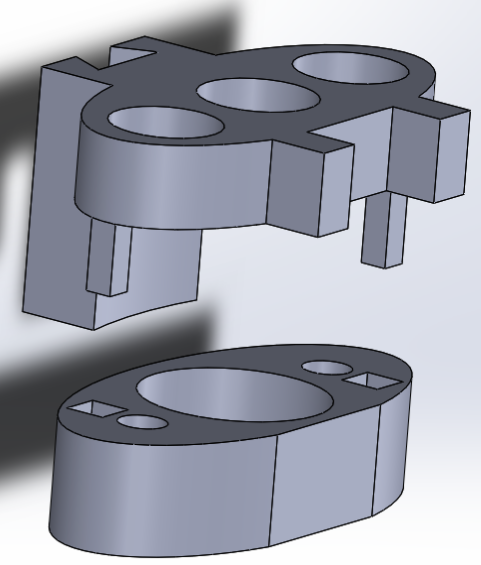
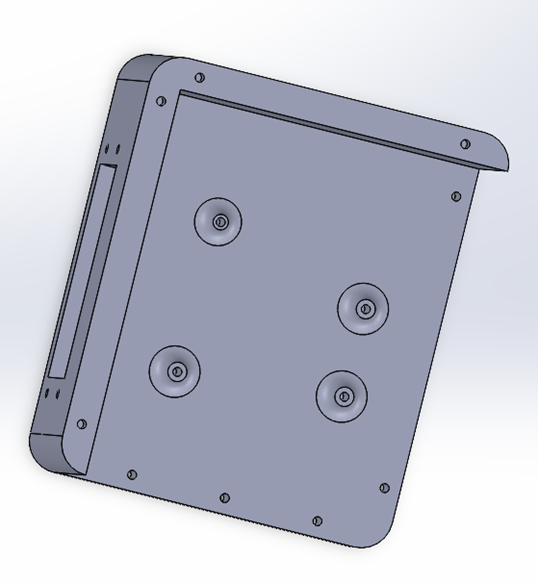
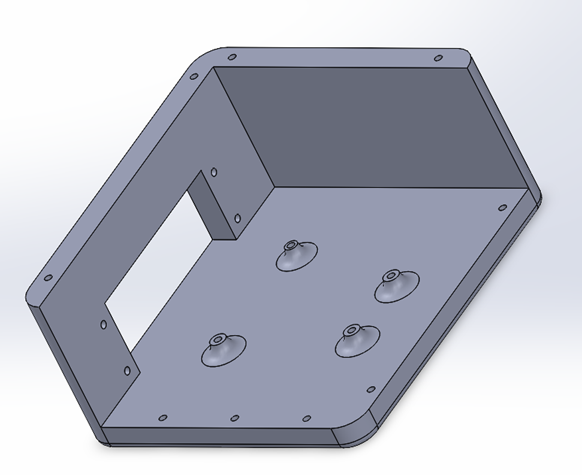
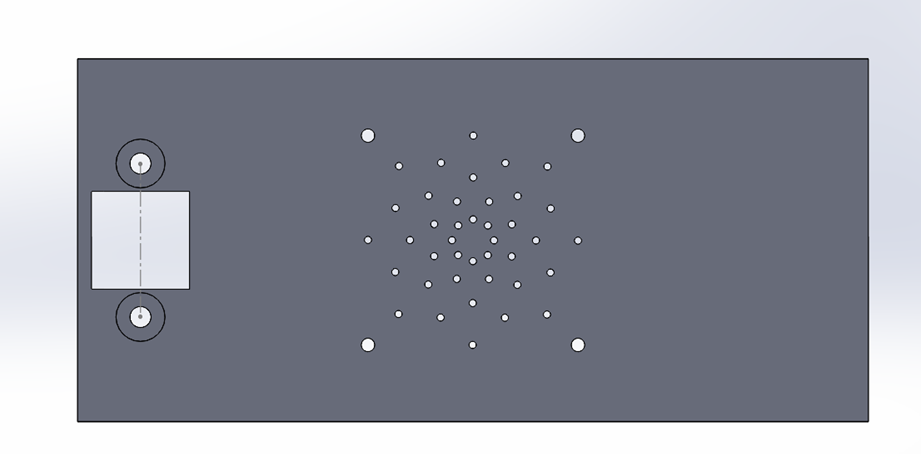
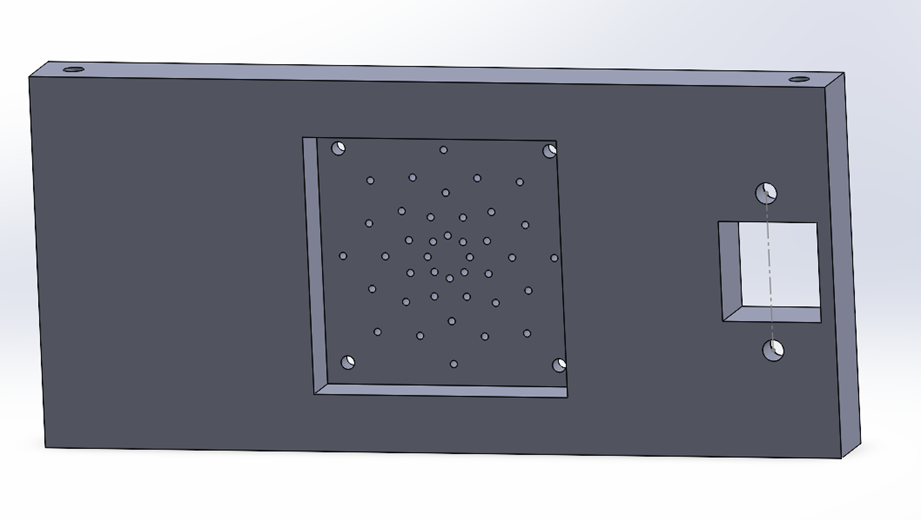
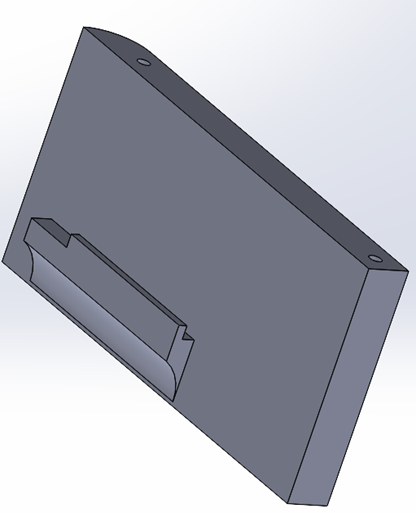
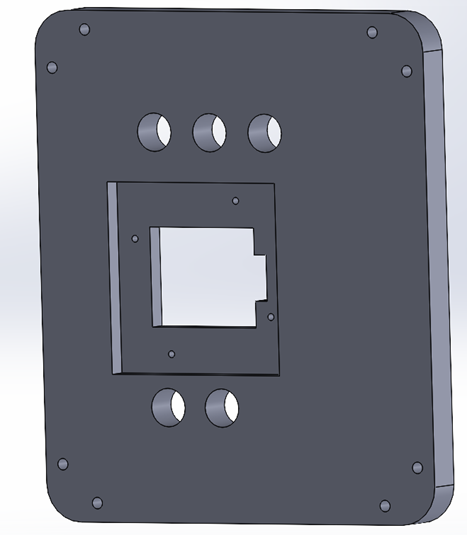
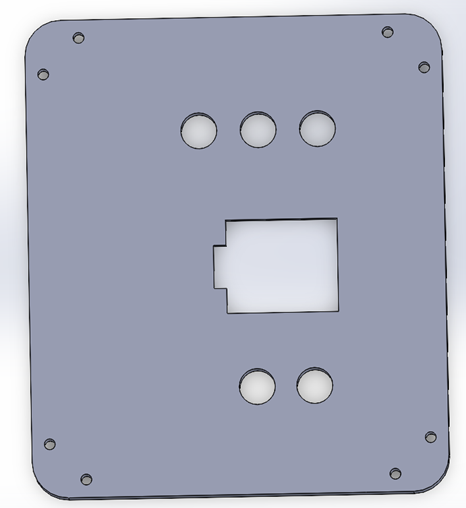
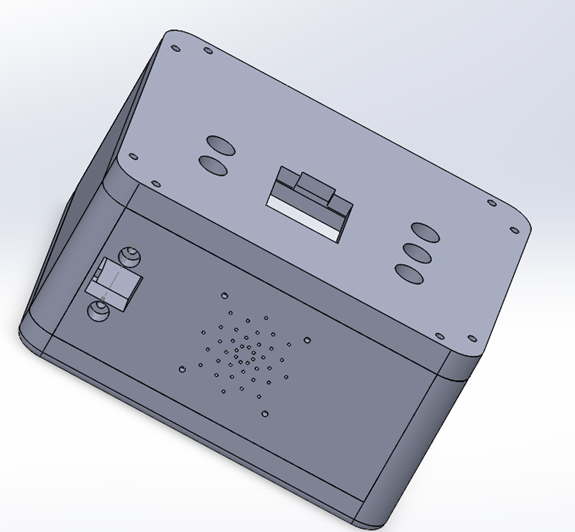
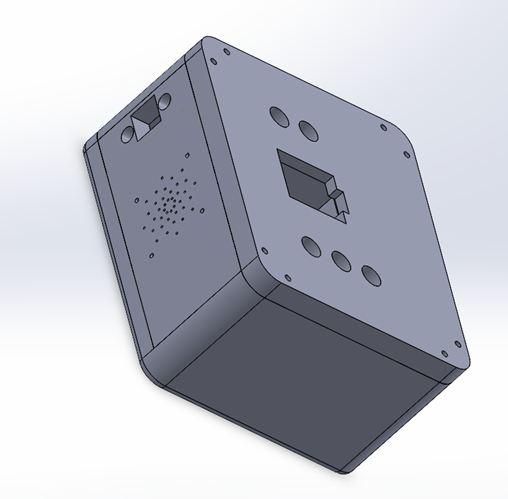
3) CAO
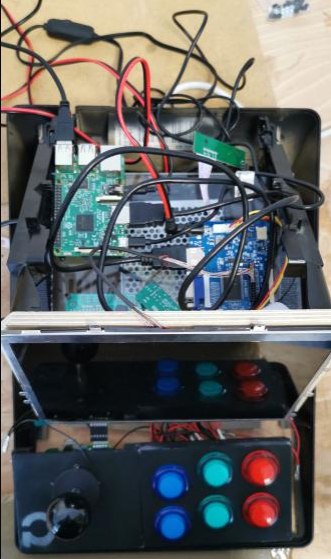
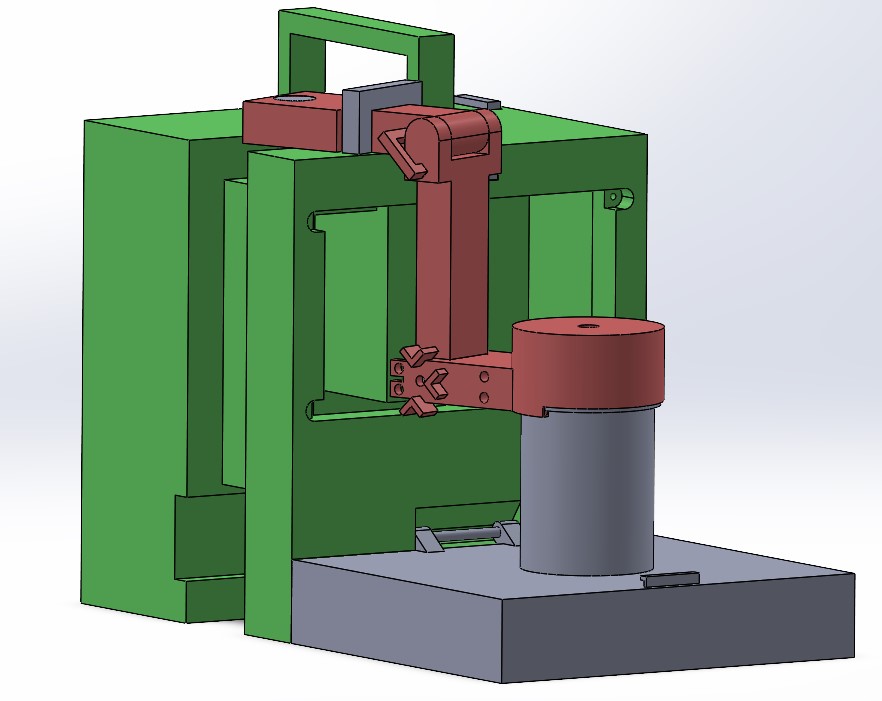
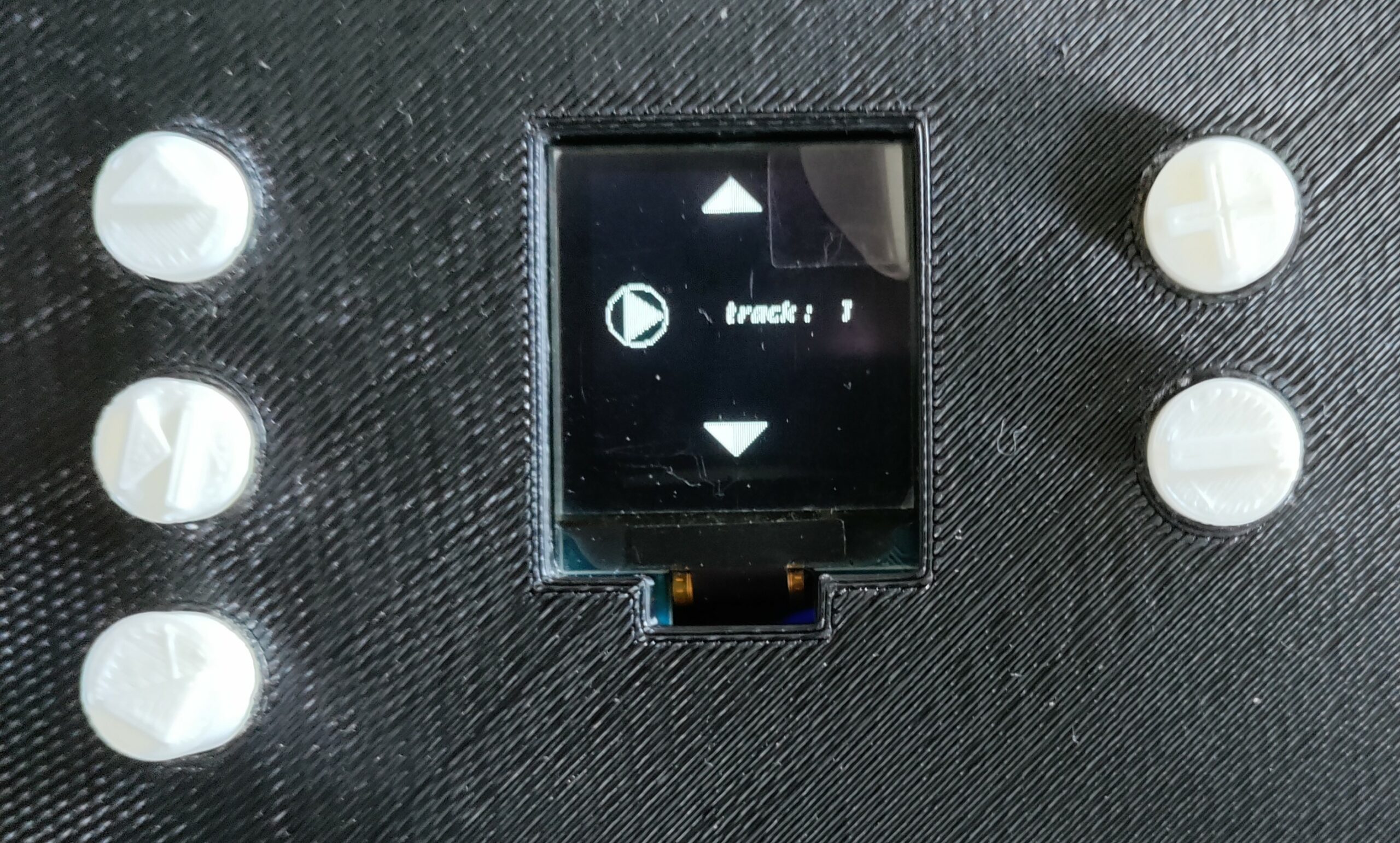
Nous avons ensuite fabriqué un boîtier pour la boîte à histoire. Il nous restait peu de temps pour faire un design stylisé, nous avons donc fait un design très simple. Le boutons présent sur le shield imprimé sont superposés par des surboutons.
Conclusion
Nous avons apprécié faire ce projet, c’était très enrichissant. Nous avons découvert l’univers de l’électronique à notre façon. Cette période de projet était très intéressante pour nous. Être en autonomie nous a appris à nous débrouiller et à apprendre à notre rythme. Nous avons pu progresser par nos propres expériences, ce qui est encore plus gratifiant. De plus, ce projet a joué un rôle important pour notre avenir. Nous voulons tous les 2 travailler dans un milieu proche de l’électronique ou de l’informatique.
Nous sommes satisfait de notre travail, la boite est fonctionnelle. Il reste toujours beaucoup d’éléments à perfectionner. Avec plus de temps, nous aurions pu par exemple ajouter un mode veille ou créer un meilleur visuel. Pour plus d’information, lien vers le GitLab Angers.


Merci d’avoir lu jusqu’au bout !
Adrien Morille et Maxime Lambert