Bonjour à toutes et à tous !
-
Nous sommes deux étudiants en deuxième année de cycle préparatoire d’école d’ingénieur, Alan et Romane. Nous avions pour projet d’améliorer la machine de recyclage de matériaux pour impression 3D.
Contexte
-
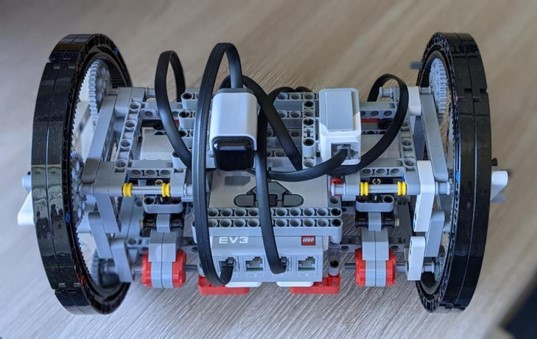
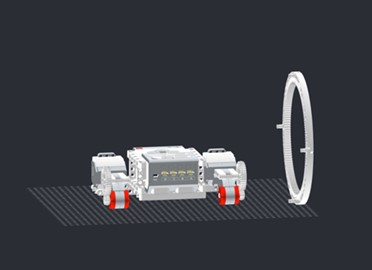
La machine de recyclage de matériaux pour impression 3D existait déjà au début de notre projet. En effet, il y a trois ans, deux élèves espagnols se sont lancés dans la création de cette machine composée de plusieurs éléments :
- l’extrudeuse : permettant de chauffer les granulés et de faire sortir du fil
- le système de refroidissement : constitué d’un ventilateur qui refroidit le fil dès sa sortie
- le système de tirage : tire sur le fil
- le système de bobinage : permettant d’obtenir une bobine de fil pour tout types d’imprimante 3D
- le système d’alimentation : permettant de mettre en fonctionnement les deux moteurs
- le système de mesure : permettant de mesurer le diamètre du fil instantanément
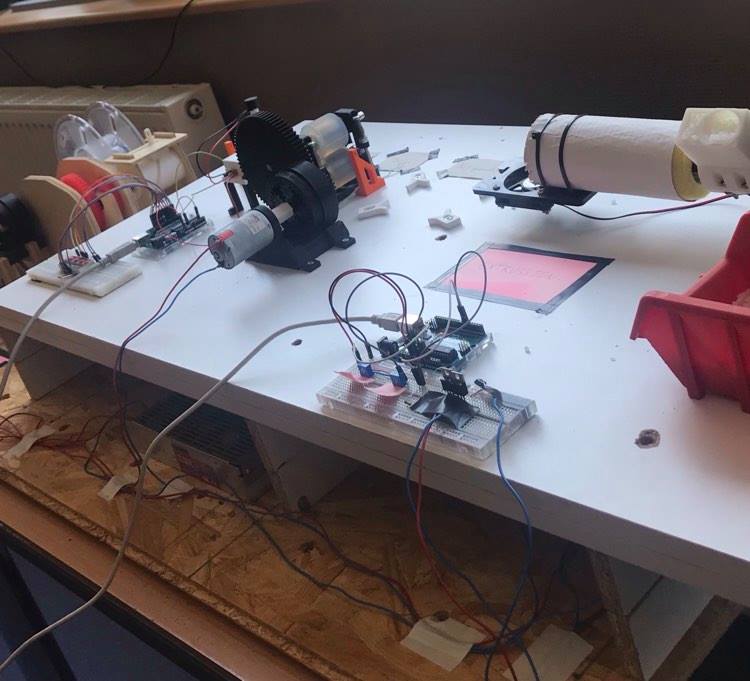
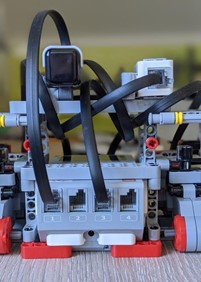
Photo de la machine de recyclage de matériaux pour impression 3D
Objectifs :
-
Nous avions pour objectif de vérifier le fonctionnement de la machine et de faire les réparations nécessaires dans un premier temps. Ensuite nous devions refaire le support du capteur pour avoir une meilleure précision sur les valeurs affichées. Pour finir, nous devions faire des modifications sur le code de la carte Arduino Uno afin d’obtenir un affichage plus précis et lisible.
Réparations :
-
La machine n’ayant pas fonctionné pendant trois ans, nous avons dû faire quelques réparations dès la première mise en route. Nous avons branché plusieurs fils ainsi que fait quelques raccordements. Nous devions coller différentes pièces qui s’étaient désolidarisées avec le temps ou encore serrer des vis. Nous avons donc dû faire attention à chaque élément de la machine dès la mise en route pour ne pas passer à côté d’une modifications ou réparations à faire.
Support Capteur :
-
La création d’un support pour le capteur est la partie la plus importante de notre projet. En effet, il fallait absolument créer un nouveau support car l’ancien, que nous avions en notre possession, laissait entrer beaucoup de lumières.
Il faut savoir que notre capteur fonctionne avec une LED de couleur rouge. Dès que le fil passe entre la lumière rouge et le capteur, il y a une ombre qui se forme sur le capteur. c’est grâce à cette ombre que le capteur peut récupérer une mesure.
Cependant, si le capteur est sujet à des perturbations telles que la lumière, il ne pourra pas fonctionner correctement et donner des résultats précis.
Nous nous sommes documentés sur les différentes formes que peut avoir un support capteur. Nous sommes tombés sur le site suivant :
-
Il nous a permis de concevoir un support de capteur qui réduit considérablement l’exposition de celui-ci à la lumière.
Nous avons décidé de réaliser notre support de capteur en trois parties :
- 4 pieds
- pièce du dessous avec la place du capteur
- pièce du dessus avec la place de la LED rouge
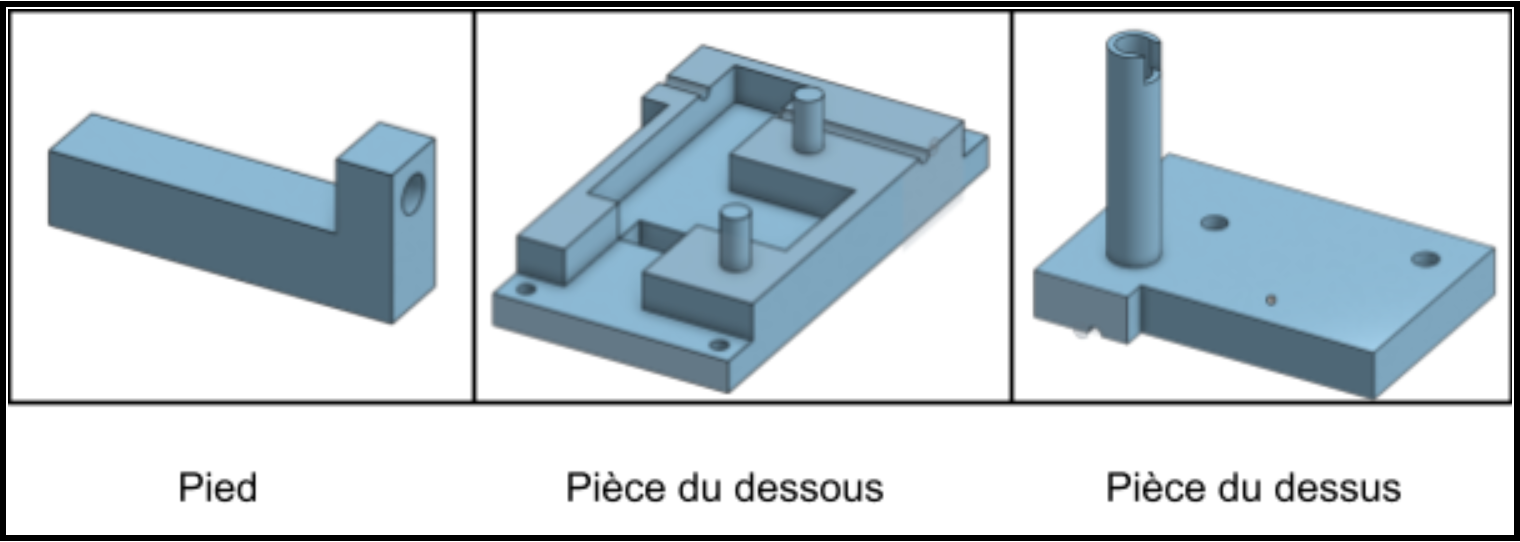
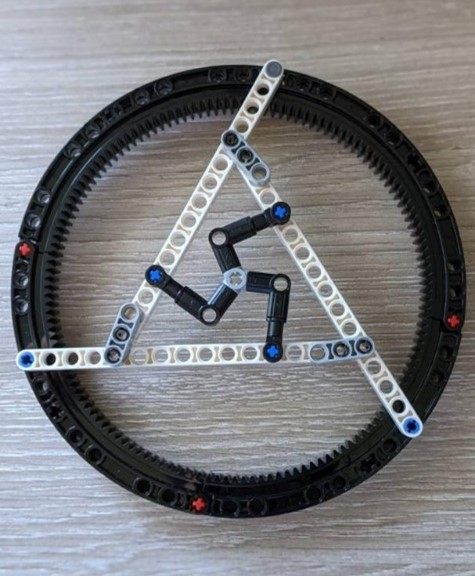
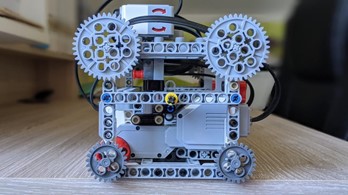
Ensemble des pièces qui constituent notre support Capteur
-
Après plusieurs impressions et réglages nous avons obtenu le support de Capteur que nous voulions.
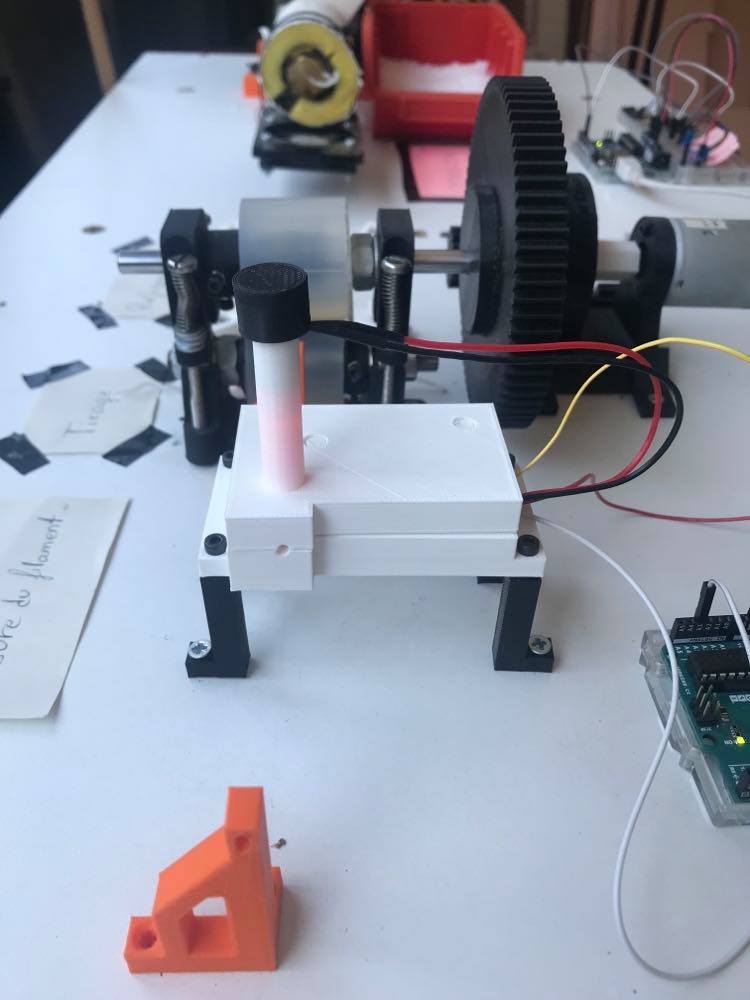
Photo du support de Capteur final
Carte Arduino Uno :
-
Nous avons fini notre projet en nous occupant de la carte Arduino Uno. Notre but était d’afficher la valeur du diamètre mesuré de façon plus claire. Pour cela nous avons étudié le code de la carte Arduino Uno. Après plusieurs recherches sur le site internet Arduino et à partir de vidéos, nous avons trouvé le problème. Il fallait enlever cette ligne du code pour que l’affichage soit directement plus clair :
![]()
Conclusion :
-
Pour conclure nous avons réussi à refaire fonctionner cette machine de recyclage de matériaux pour impression 3D ainsi qu’à l’améliorer grâce au nouveau support de capteur et une modification du code existant afin d’obtenir un affichage du diamètre plus clair et lisible.