Salut les polypotes !
Nous sommes Maëlys DUBOIS et Thomas BLAIN, étudiants en deuxième année de cycle préparatoire intégré à Polytech Angers. Pour notre quatrième semestre, nous sommes amenés à mettre en œuvre un projet, de A à Z. Notre objectif est de concevoir puis construire une maquette de démonstration (salons, forum, etc.) d’un compteur binaire motorisé, que l’on pourra facilement déplacer. Nous avons choisi ce projet car il nécessite des compétences en mécanique/conception et en informatique/électronique, domaines sur lesquels nous sommes complémentaires.
I. Présentation du projet
Le système est composé de 8 pièces double face sur lesquelles il est écrit 0 d’un côté et 1 de l’autre, les pièces sont suspendues à une tige et la première est reliée à un moteur pas à pas qui, quand il tourne, entraîne la première pièce, qui peut ensuite, selon si elle affiche 0 ou 1, entraîner la pièce suivante… Cette disposition permet d’afficher les 255 premiers nombres en binaire dans l’ordre.
Le cahier des charges du projet était très ouvert ; il demandait uniquement de concevoir le compteur et de le faire fonctionner électroniquement. Nous étions totalement libres sur les options de fonctionnement, le nombre de bits, etc. Les contraintes comprenaient la facilité de transport (poids, taille) et la création d’options en électronique à partir de matériaux simples.
Vous pouvez voir ci-dessous le principe du système :

Valeur 0 en binaire

Valeur 1 en binaire

Valeur 2 en binaire
Notre compteur comporte de nombreuses pièces, dont une partie imprimée en 3D, d’autres sont en dibond (plaque plastique entourée de plaques d’aluminium), et d’autres sont en bois.
Notre objectif avec ce système est de pouvoir retranscrire au grand public le principe du langage binaire, tout en pouvant manipuler un système facile d’utilisation.
Le principe de base est que vous choisissiez un nombre quelconque pour que le compteur vous affiche son équivalent en binaire.
Vous pouvez expérimenter 3 modes de fonctionnement différents et indépendants parmi les suivants :
– Incrémenter un à un grâce à un bouton poussoir. (incrémenter = +1)
– Incrémenter en continu grâce à un bouton poussoir.
– Choix du nombre à afficher (entre 0 et 255) en sélectionnant le chiffre souhaité avec un encodeur rotatif (avec bouton) qui commande un afficheur.
II. Travail réalisé
Nous pouvons distinguer deux parties concernant la mise en forme de notre projet tutoré. Il est composé d’une partie informatique / électronique ainsi que d’une partie mécanique / conception / impression 3D.
Nous avons débuté notre projet par une phase de discussion sur la conception de notre compteur en général et ses caractéristiques. Nous avons fait un premier choix non définitif concernant les fonctionnalités disponibles et leur application, la taille, le nombre de plaquettes numérotées (soit le nombre de bits), le type de moteur et son mode de transmission, le type de carte de commande de notre compteur, etc.
Nous nous sommes par la suite lancés dans le dimensionnement des pièces pour que l’ensemble puisse rentrer dans notre valise et dans les essais de composants électroniques dont nous pourrions avoir besoin.
Après avoir dimensionné les pièces sur le logiciel FUSION 360, nous nous sommes rendu compte que certaines pièces ne pouvaient pas être imprimés en 3D, étant donné leur taille trop importante.
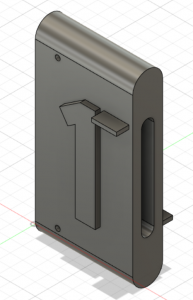
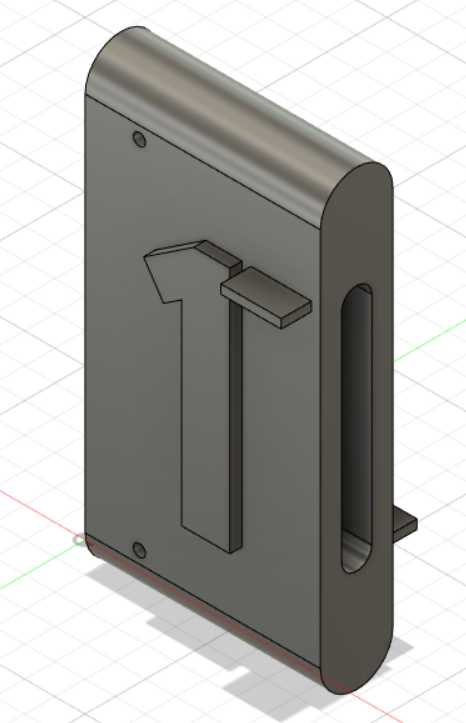
Modélisation plaquette numérotée sur Fusion360.
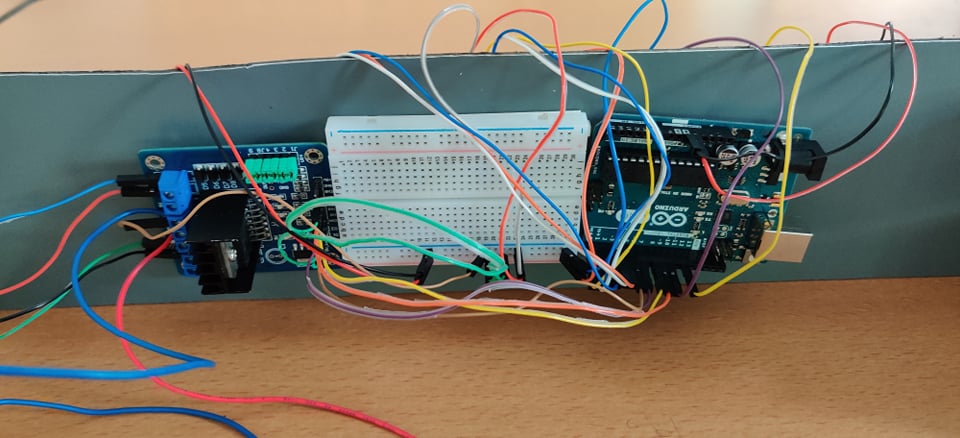
La partie électronique du système est dirigée par une carte de commande Arduino UNO. Nous avons pu tester et configurer les fonctionnalités de comptage sur les afficheurs après avoir appris à utiliser le langage Arduino et son logiciel. Nous avons commencé à tester et programmer indépendamment chaque élément électronique dont nous pourrions avoir besoin pour ensuite commencer à les lier ensemble ou améliorer leur fonctionnement.
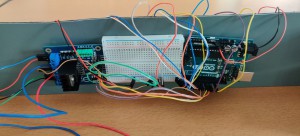
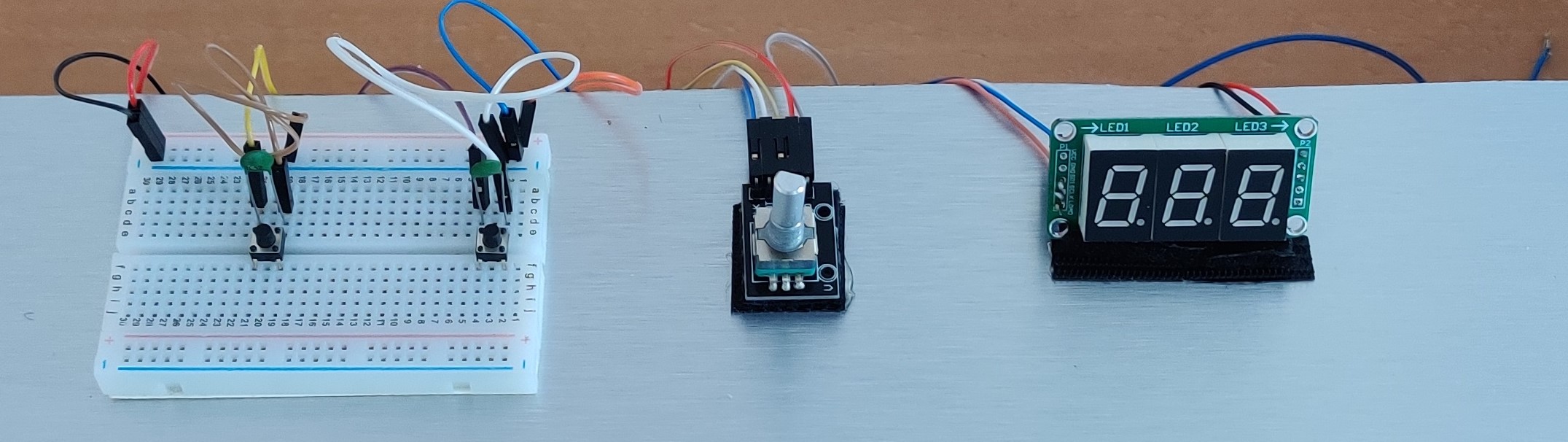
Système électronique sous le fond de commande.

Système électronique “partie commande”.
Nous sommes passés par des phases de recherche de composants que nous ne pouvons pas forcément concevoir en impression 3D.
Nous avons recherché quel moteur pas à pas serait le plus à même de convenir à notre système, quelles rondelles utiliser pour séparer les plaquettes, quelles charnières utiliser pour basculer notre compteur, quel système poulie-courroie utiliser pour la transmission.

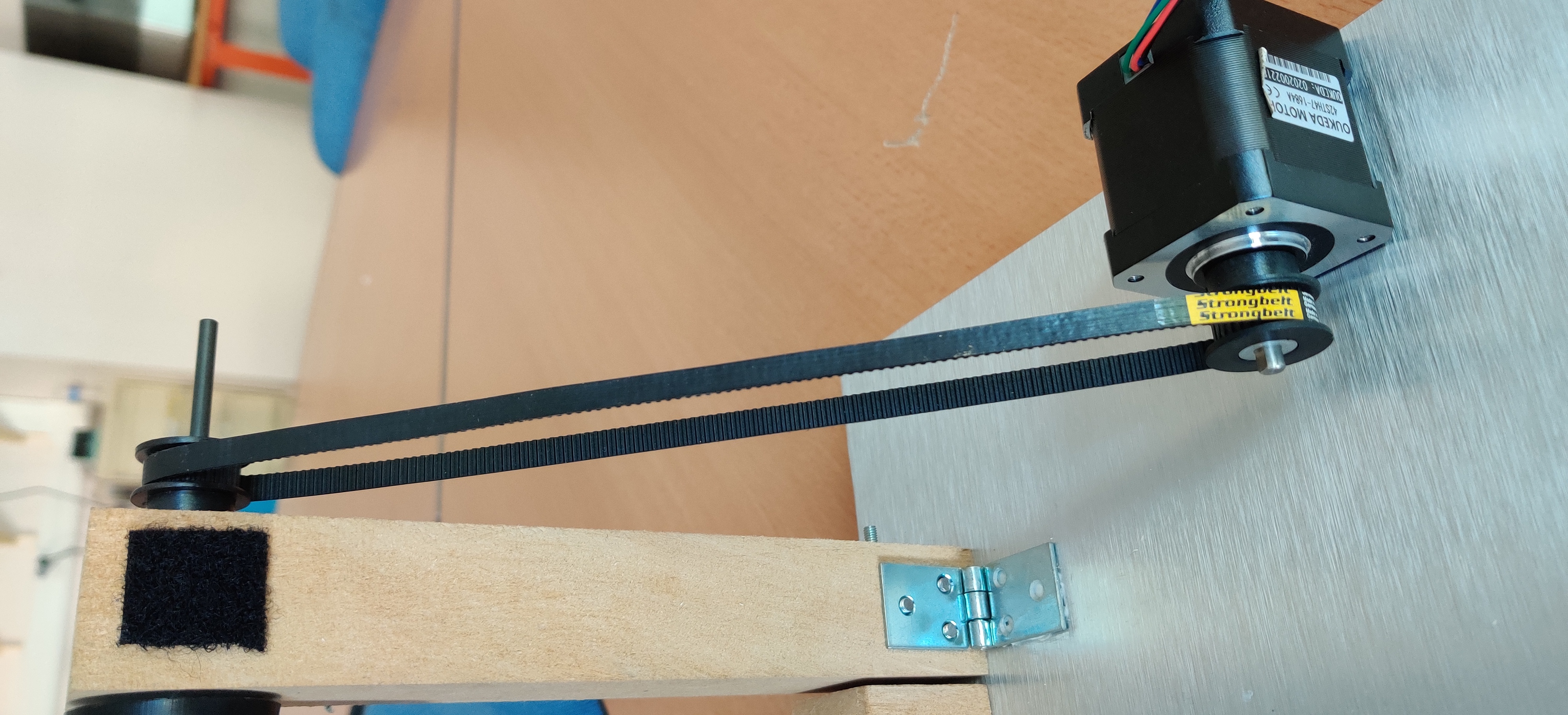
Notre moteur “pas à pas” et son système de transmission “poulies-courroie”.
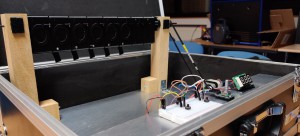
Étant donné que nous nous sommes rendu compte lorsque nous voulions faire l’impression 3D de nos fonds et de nos potences que ce n’était pas possible pour celles-ci, nous avons opté pour des plaques de dibond pour les fond ainsi que du bois pour les pieds servant à soutenir nos fonds et les blocs de maintien des potences
Pour finir, nous avons enfin pu procéder à l’assemblage de notre compteur binaire et le relier à son système de commande.
III. problèmes rencontrés
Concernant la partie mécanique, le premier problème apparu est le dimensionnement finalement peu pertinent autour d’une potence de maintien, afin d’accueillir notre servomoteur, pour que l’on se rende compte qu’un moteur pas à pas serait plus pertinent pour notre système. A la suite de cela, nous avons redimensionné et modifié la potence de maintien censée accueillir le servomoteur, pour l’accueil du moteur pas à pas choisi. Cependant, après discussion avec notre professeur encadrant, il est ressorti qu’il serait préférable d’inclure un système poulie-courroie pour la transmission de notre moteur au compteur. Le moteur ne doit donc plus se trouver sur l’axe de la tige de maintien des plaquettes, ce qui rend le dimensionnement d’un espace moteur dans la potence inutile.
De plus, nous avons dû changer à quelques reprises les dimensions de nos pièces, mais cela provient plus d’une évolution de notre projet que d’un problème réel.
Ensuite, nous avons voulu commencer l’impression test de nos pièces en 3D mais nous avons attendu 2 mois sans que cela ne puisse être possible. Les files d’attente étaient très longues et toutes les imprimantes 3D étaient HS. Jusqu’à la fin de notre projet, nous n’avons donc jamais pu imprimer nos pièces. De ce fait, nous avons dû chercher à contacter une connaissance possédant une imprimante 3D et qui pourrait nous aider pour la conception de nos pièces finales.
Concernant la partie électronique, c’est notre manque de connaissance qui nous a causé le plus de tort. Nous sommes donc assez limités lorsque des problèmes surviennent. Lorsque les programmes ne fonctionnent pas comme nous l’attendions, cela peut nous prendre beaucoup de temps afin de résoudre le problème.
Ensuite, nous avons eu quelques soucis avec le logiciel Arduino. Nous avions un problème de bibliothèque, qui ne fonctionnait pas sous linux. Il a donc fallu passer sous Windows, mais ça n’a pas fonctionné dès le début. C’est en passant sur le logiciel Arduino en ligne que notre programme a pu fonctionner normalement.
Il a aussi fallu adapter, tout au long du projet, les options du compteur au fur et à mesure des essais des composants. Il y avait des composants auxquels nous n’avions pas pensé au préalable, d’autres qui étaient finalement trop compliqués à utiliser, etc.
IV. Conclusion
Pour conclure, nous sommes plutôt satisfaits du résultat final par rapport à notre idée initiale du projet. Notre système fonctionne très bien dans les grandes lignes.
Il arrive de temps en temps que les plaquettes poussantes ne tombent pas parfaitement à l’emplacement qui leur est dédiée et les potences de maintien ont un léger jeu avec les blocs de support, ce qui pose un léger problème de tension de notre courroie de transmission. Exceptés ces deux points, le compteur binaire est fonctionnel, même s’il pourrait être amélioré. Nous pourrions régler ces problèmes de potence et de pièces, ajouter un décompte sur le compteur ou encore améliorer l’esthétique du projet.
La réalisation de ce projet a été pour nous très instructive. Ce dernier s’est reposé sur un travail coopératif où nous avons beaucoup appris. Nous avons fait face à différentes problématiques, que nous avons su résoudre.
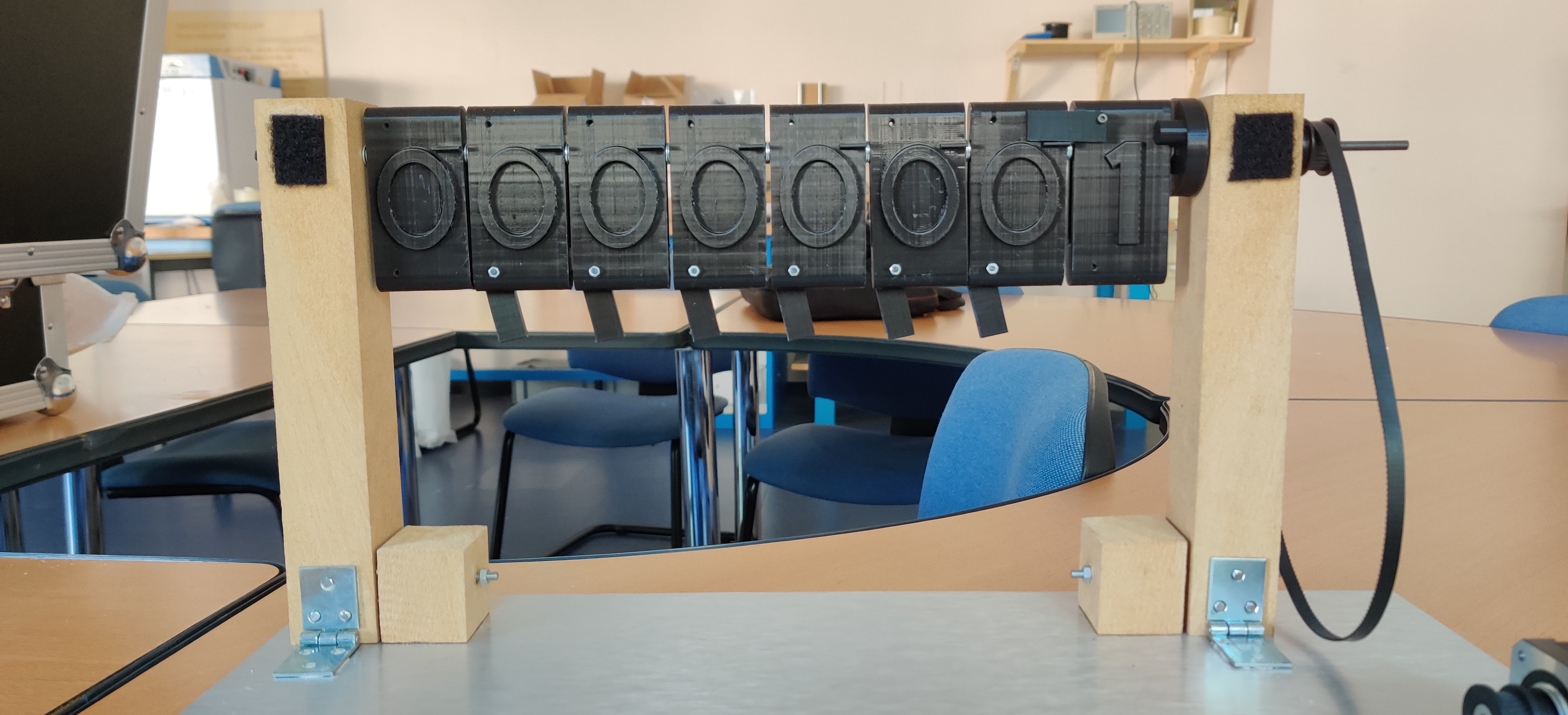
Voici donc le résultat de notre compteur binaire :
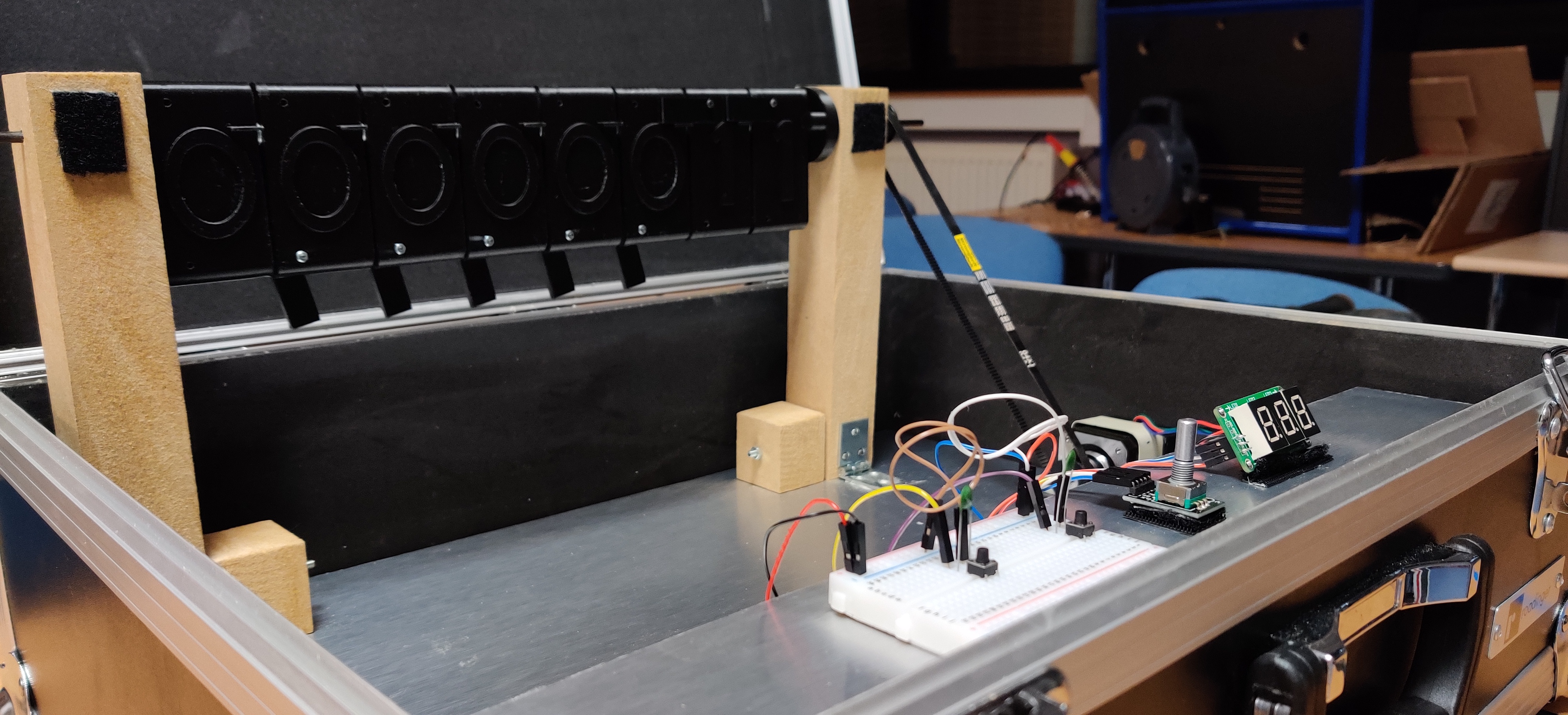
Position “utilisation du système”

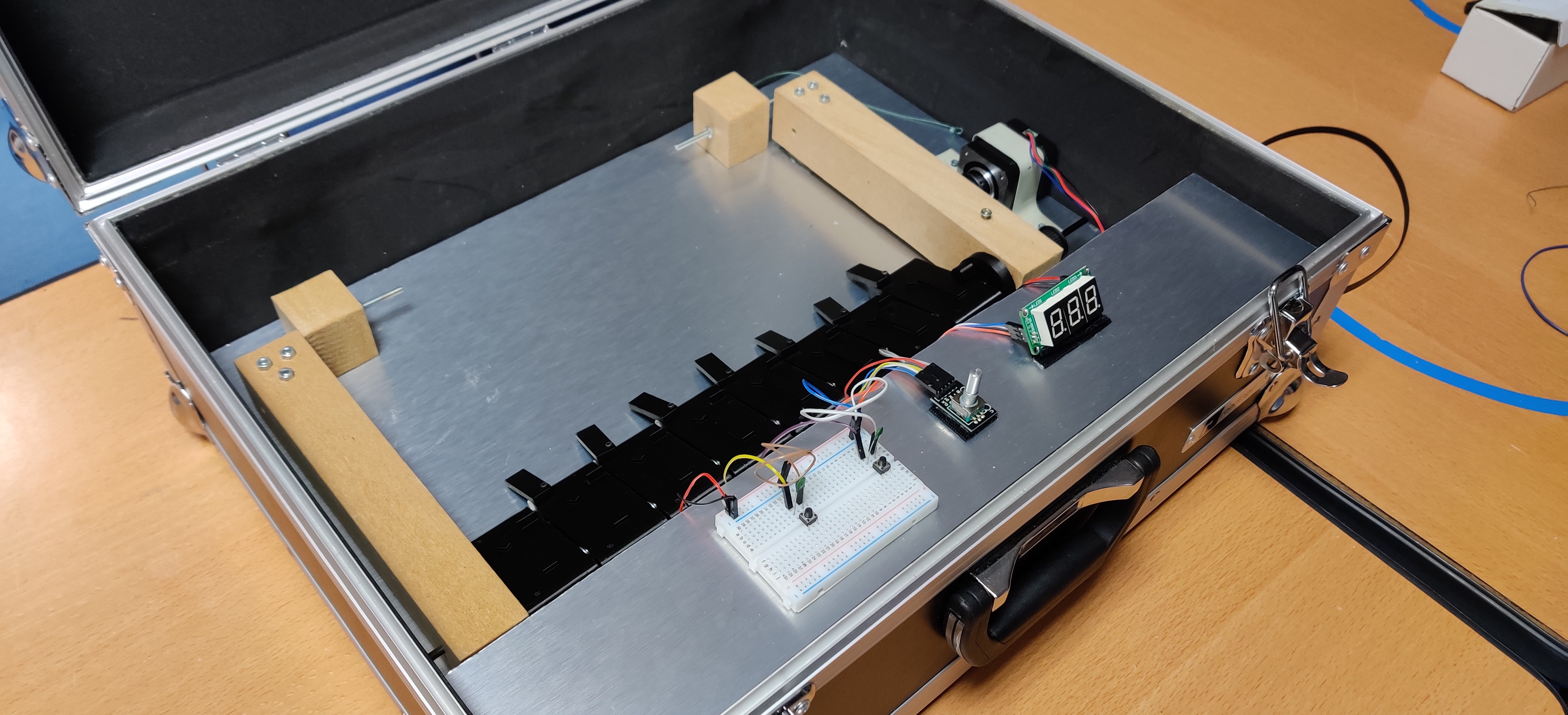
Position “repos/transport”
Vous pouvez consulter notre compte rendu qui vous expliquera plus en détail le déroulé du projet ici :
Merci de votre attention !
Maëlys et Thomas, PeiP 2A, Polytech Angers