ON PARLE DE QUOI ?
Janvier 2017, les projets de la 9ème promotion d’ingénieurs de l’ISTIA ont débutés. Théo et moi nous nous penchons, à ce moment, sur un projet de chaussure connectée.
Théo et moi nous nous penchons, à ce moment, sur un projet de chaussure connectée.
Notre objectif est d’aider des coureurs à corriger de mauvaises habitudes de courses.
Théo et moi nous nous penchons, à ce moment, sur un projet de chaussure connectée.Notre objectif est d’aider des coureurs à corriger de mauvaises habitudes de courses.
NOTRE TRAVAIL SE RÉPARTI EN PLUSIEURS ÉTAPES
► introduire des capteurs dans les chaussures
► récupérer les informations des capteurs sur un support — ▼
► interpréter les informations du support pour les restituer avec pertinence — ▼ Prêt ? Partez !
Prêt ? Partez !
On commence l’aventure.
► introduire des capteurs dans les chaussures
► récupérer les informations des capteurs sur un support — ▼
► interpréter les informations du support pour les restituer avec pertinence — ▼
Prêt ? Partez !On commence l’aventure.
LES CAPTEURS
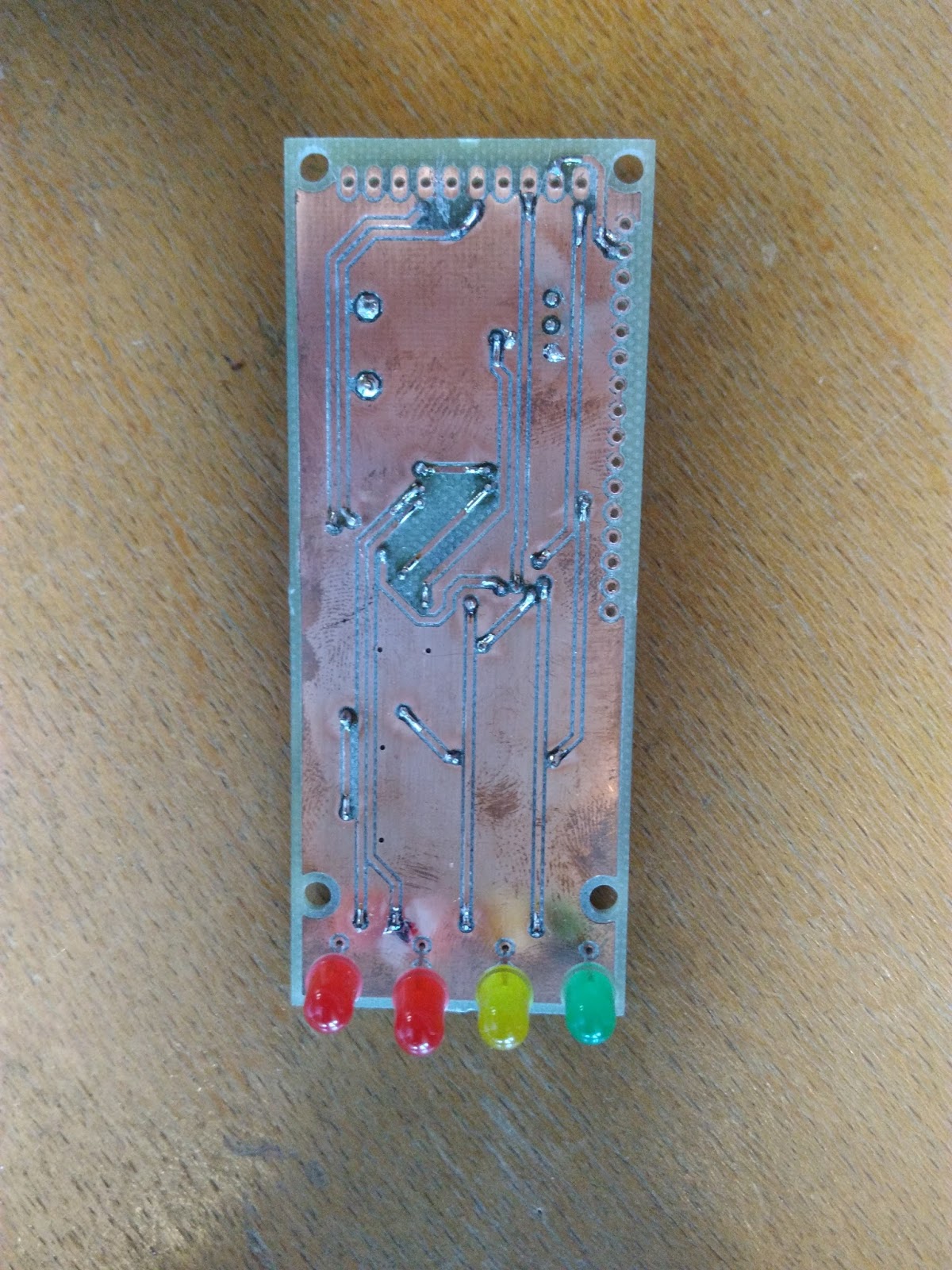
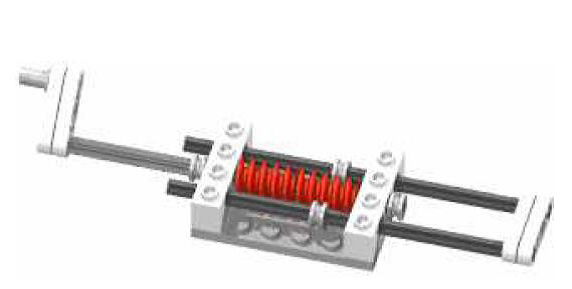
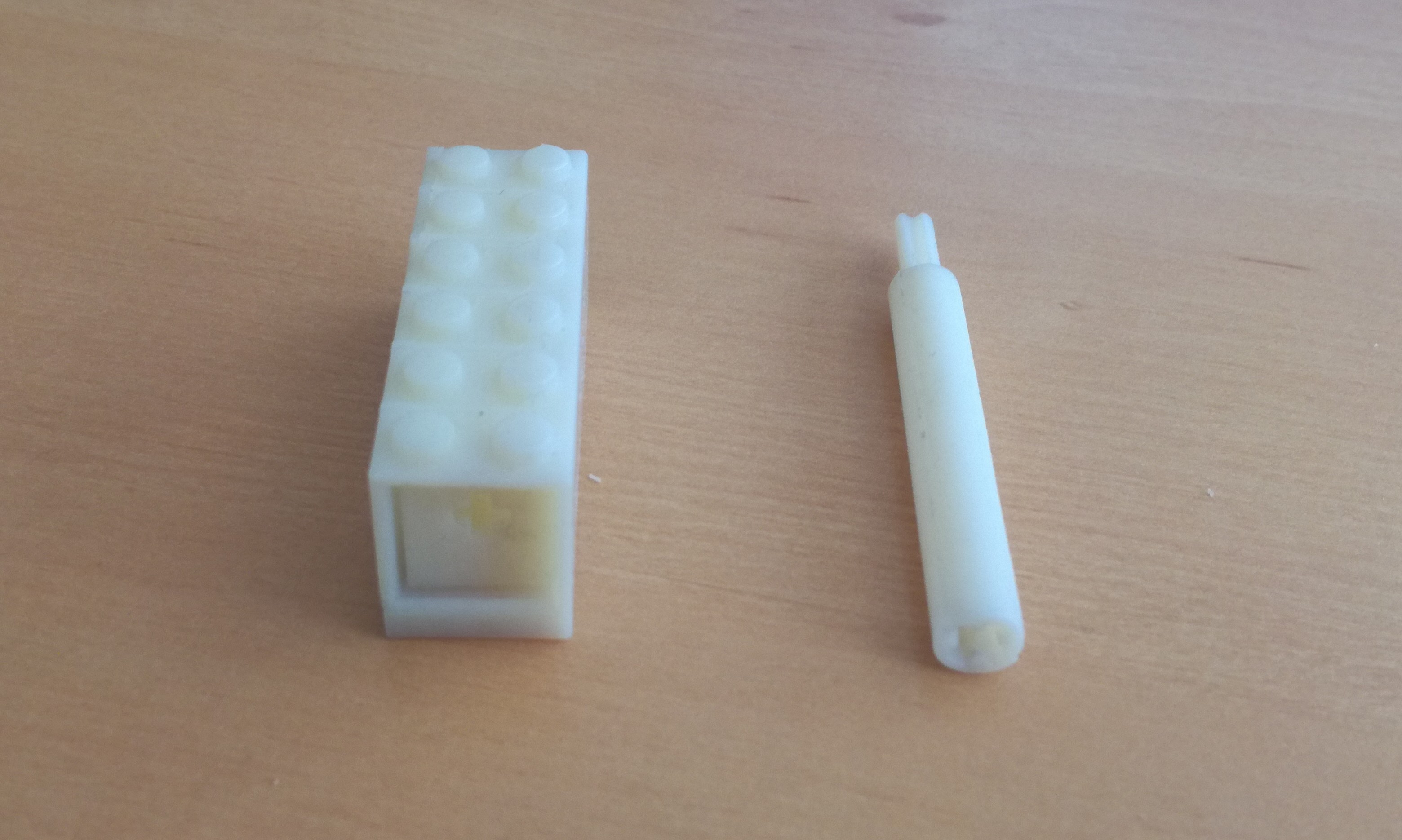
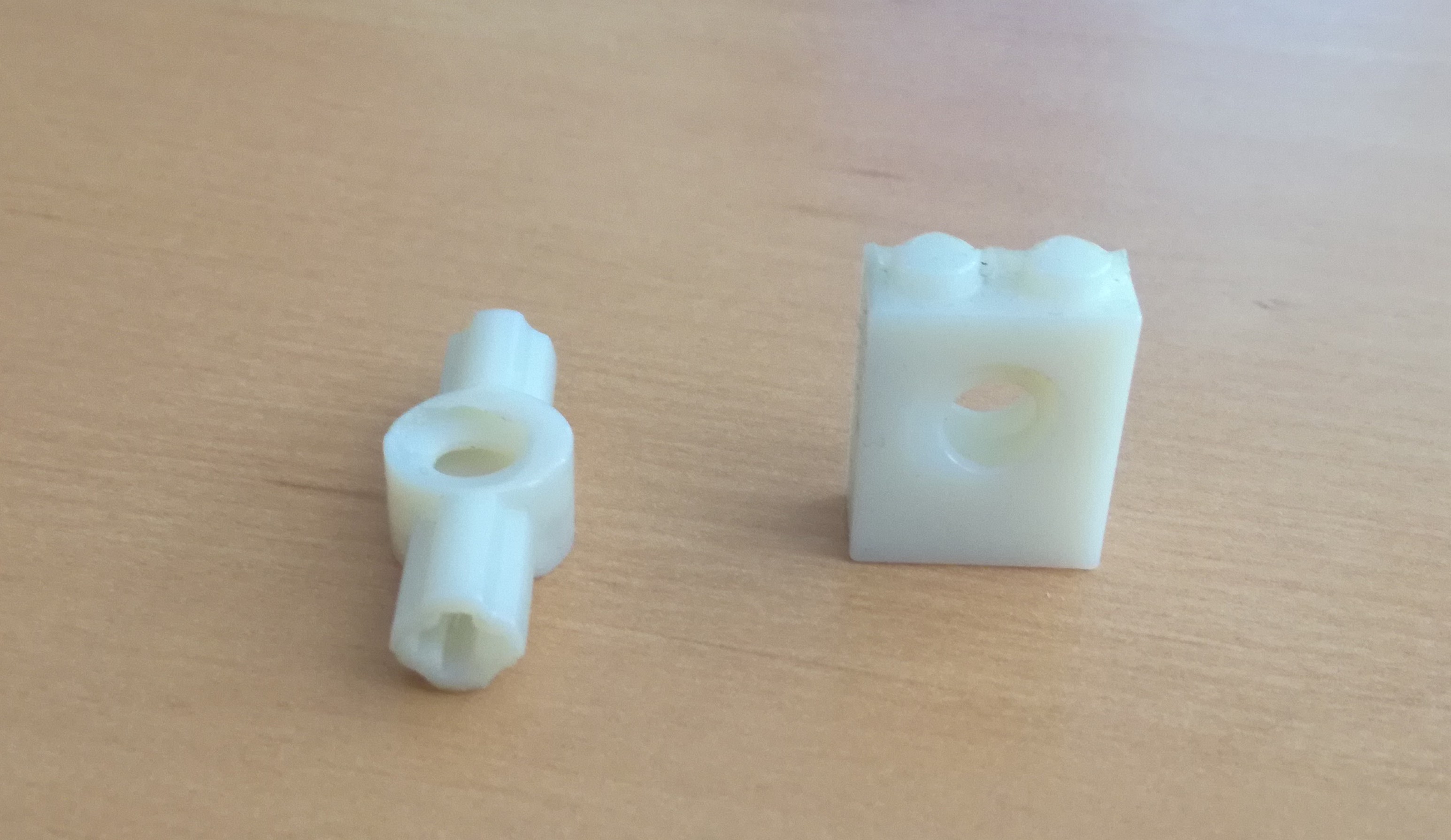
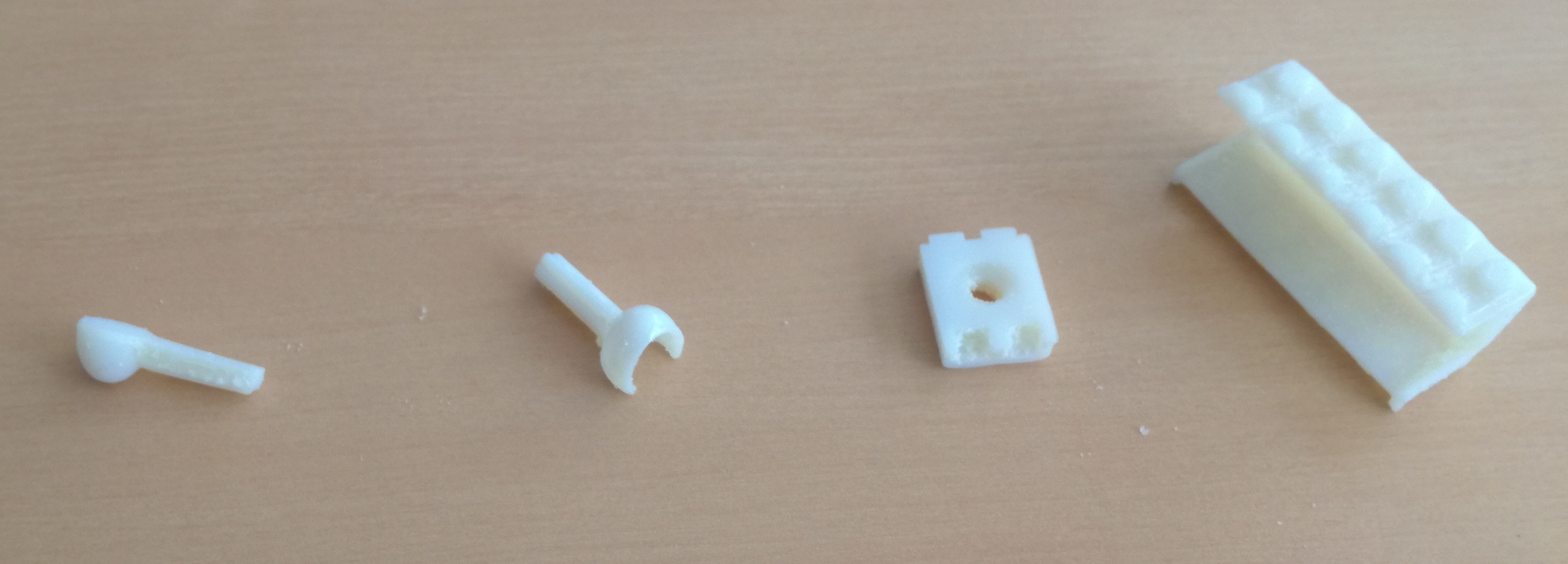
Boutons poussoirs et un capteur de pression maison
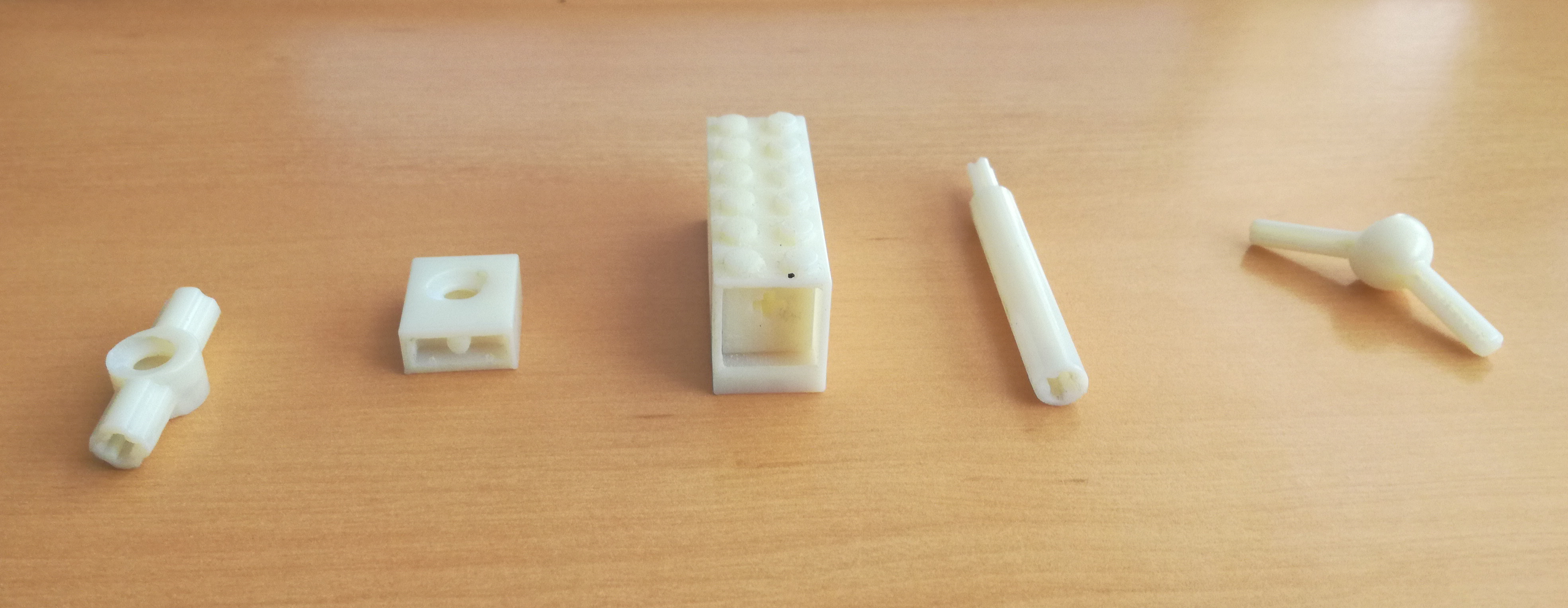
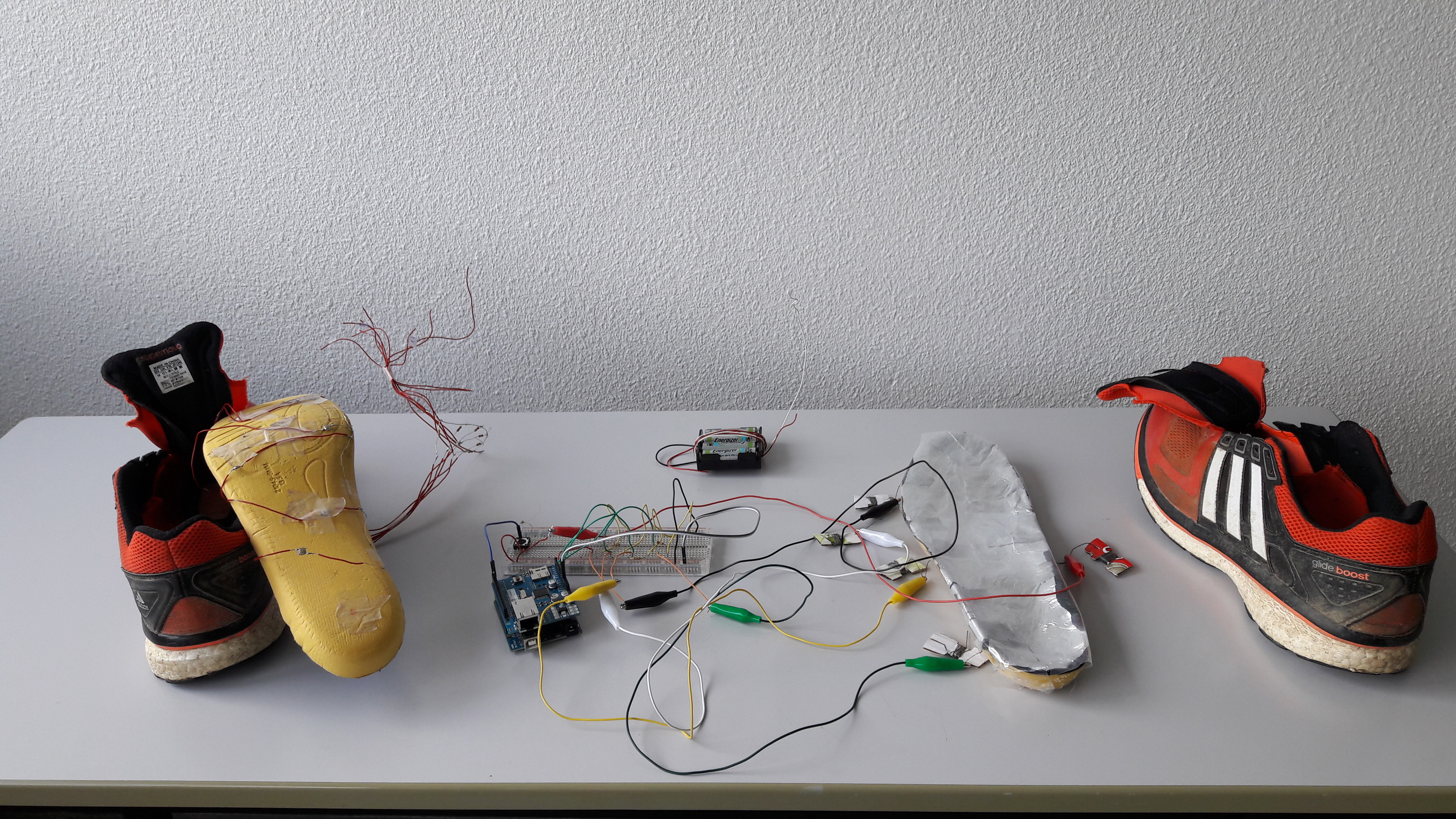
Nous avons créé deux prototypes.
Un premier avec des boutons poussoirs qui renvoient des informations en tout ou rien (le bouton est appuyé ou non).
Un second qui renvoi des signaux analogiques (la tension mesurée varie au cours du temps).
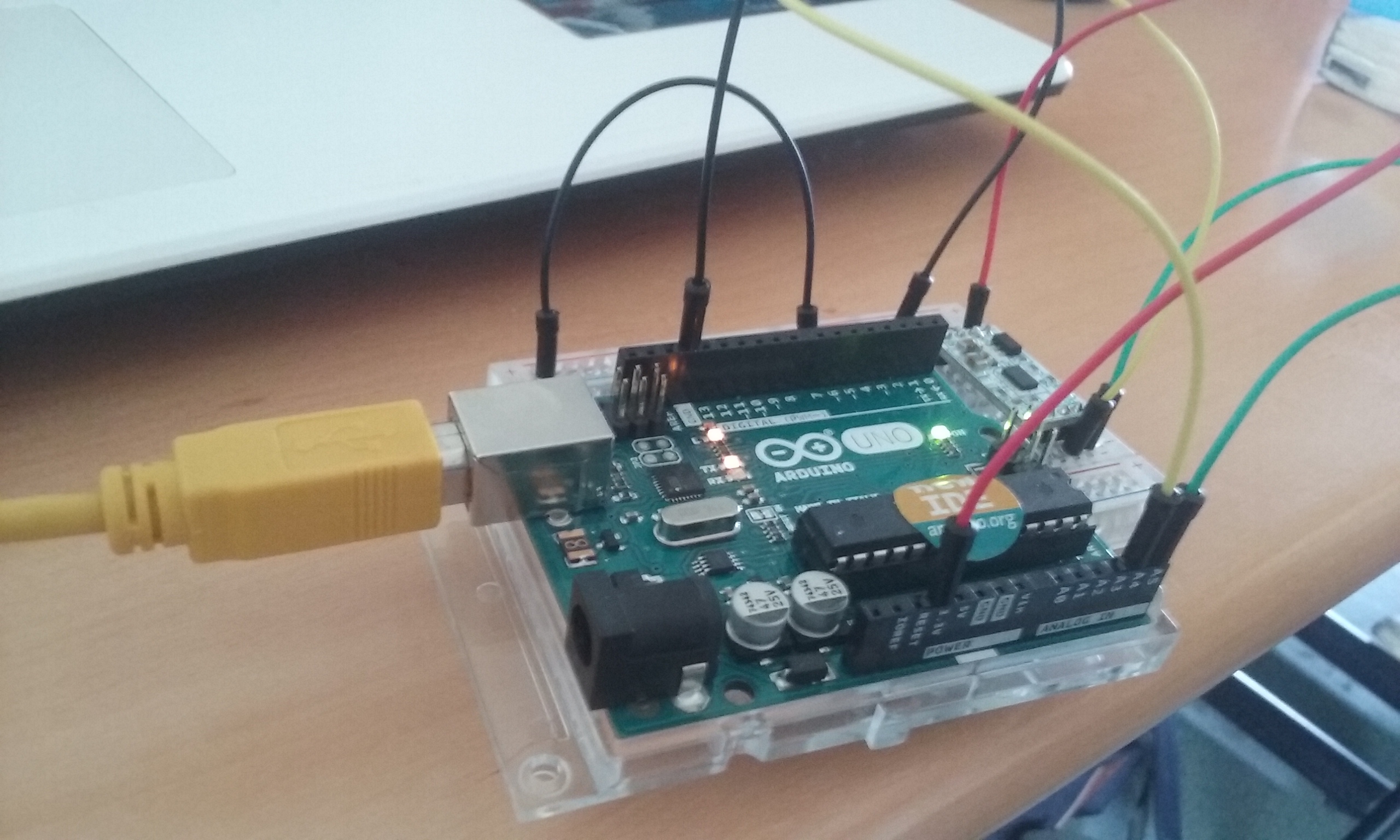
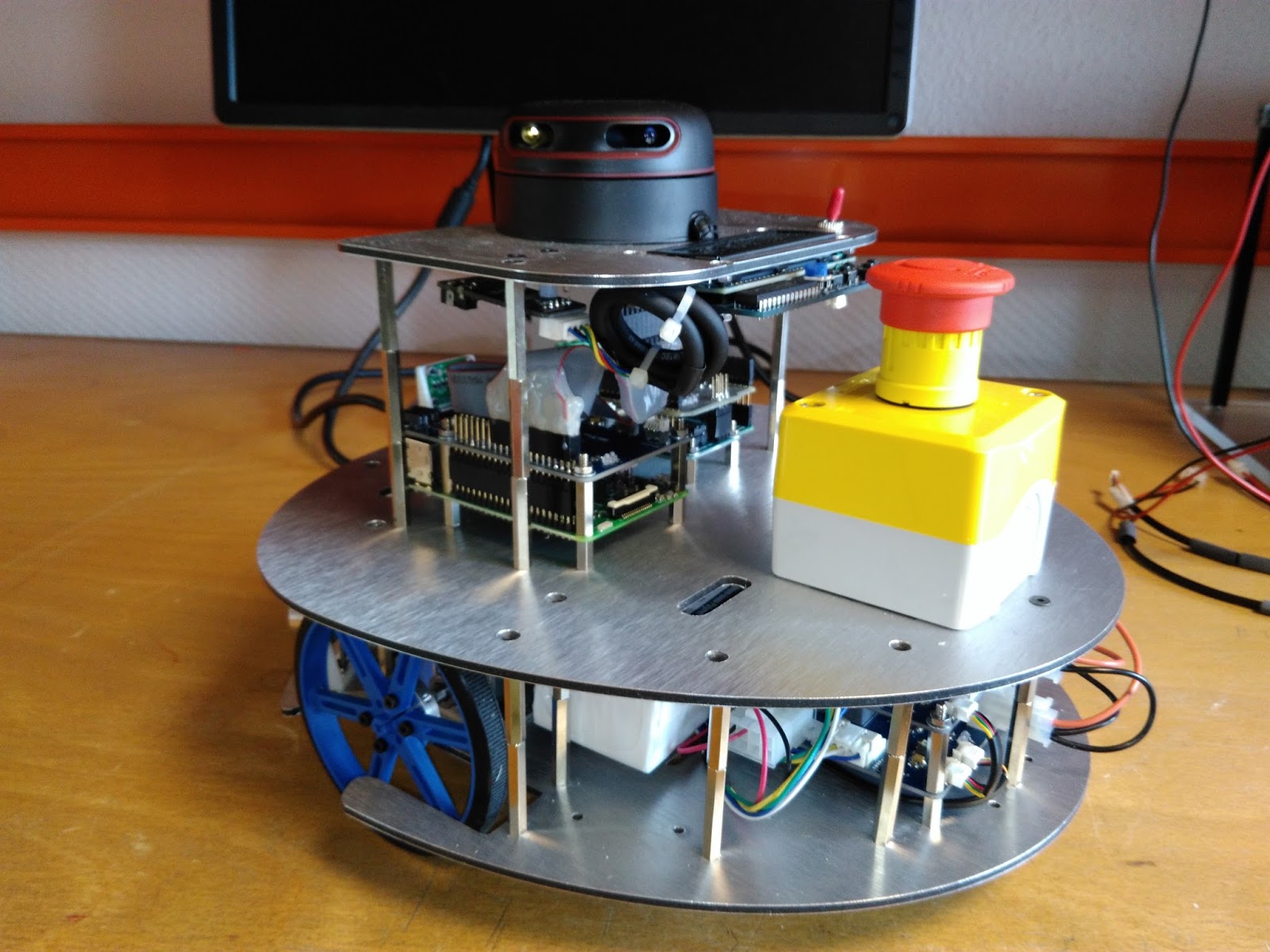
Le tout est traité à l’aide d’une carte électronique (une Arduino Uno) qui joue le rôle d’un ordinateur embarqué. Nos deux prototypes !
Nos deux prototypes !
Un premier avec des boutons poussoirs qui renvoient des informations en tout ou rien (le bouton est appuyé ou non).
Un second qui renvoi des signaux analogiques (la tension mesurée varie au cours du temps).
Le tout est traité à l’aide d’une carte électronique (une Arduino Uno) qui joue le rôle d’un ordinateur embarqué.
 Nos deux prototypes !
Nos deux prototypes !
RÉCUPÉRER L’INFORMATION
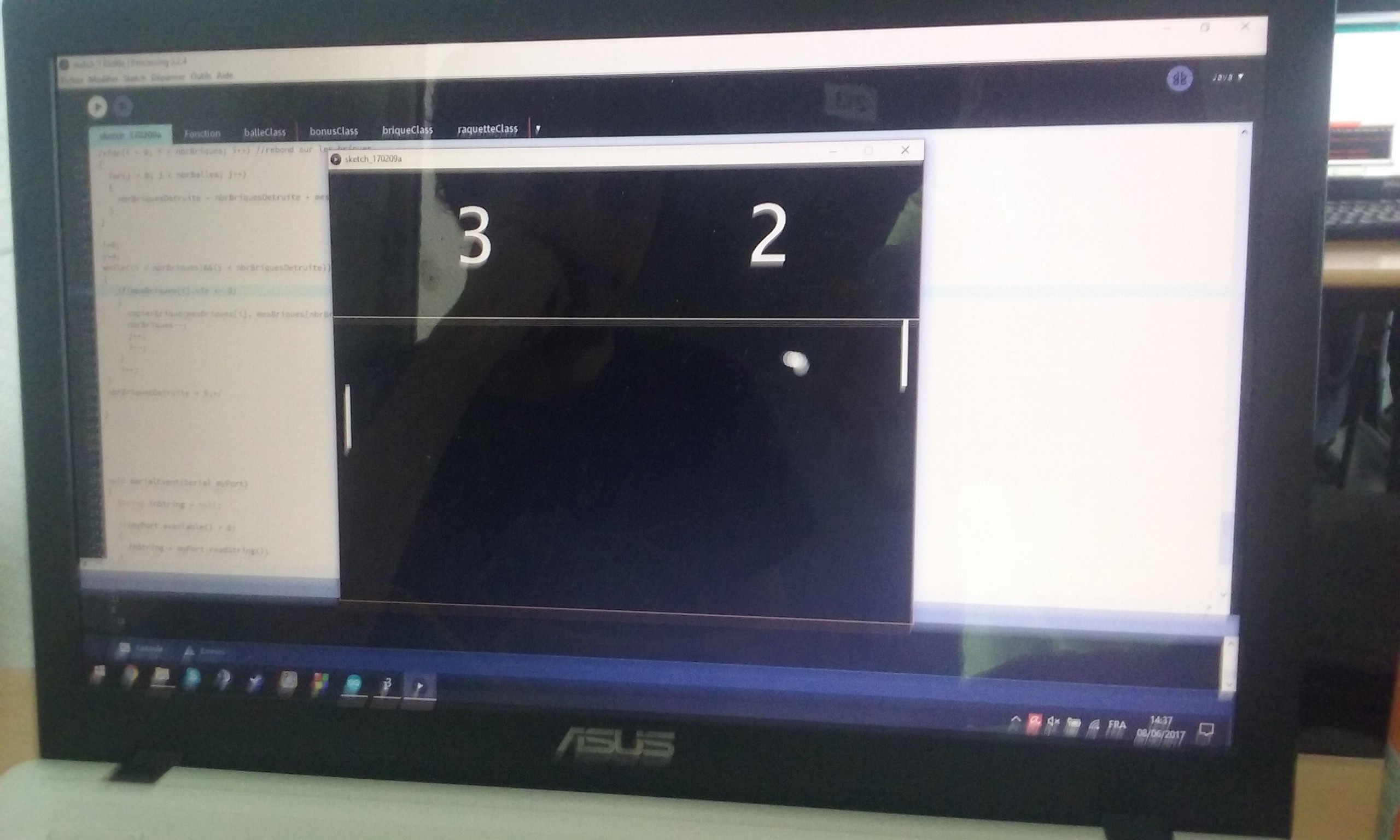
Premier essai réussi : on affiche à l’écran les valeurs créées par les capteurs !
Lecteur vidéo
00:00
00:00
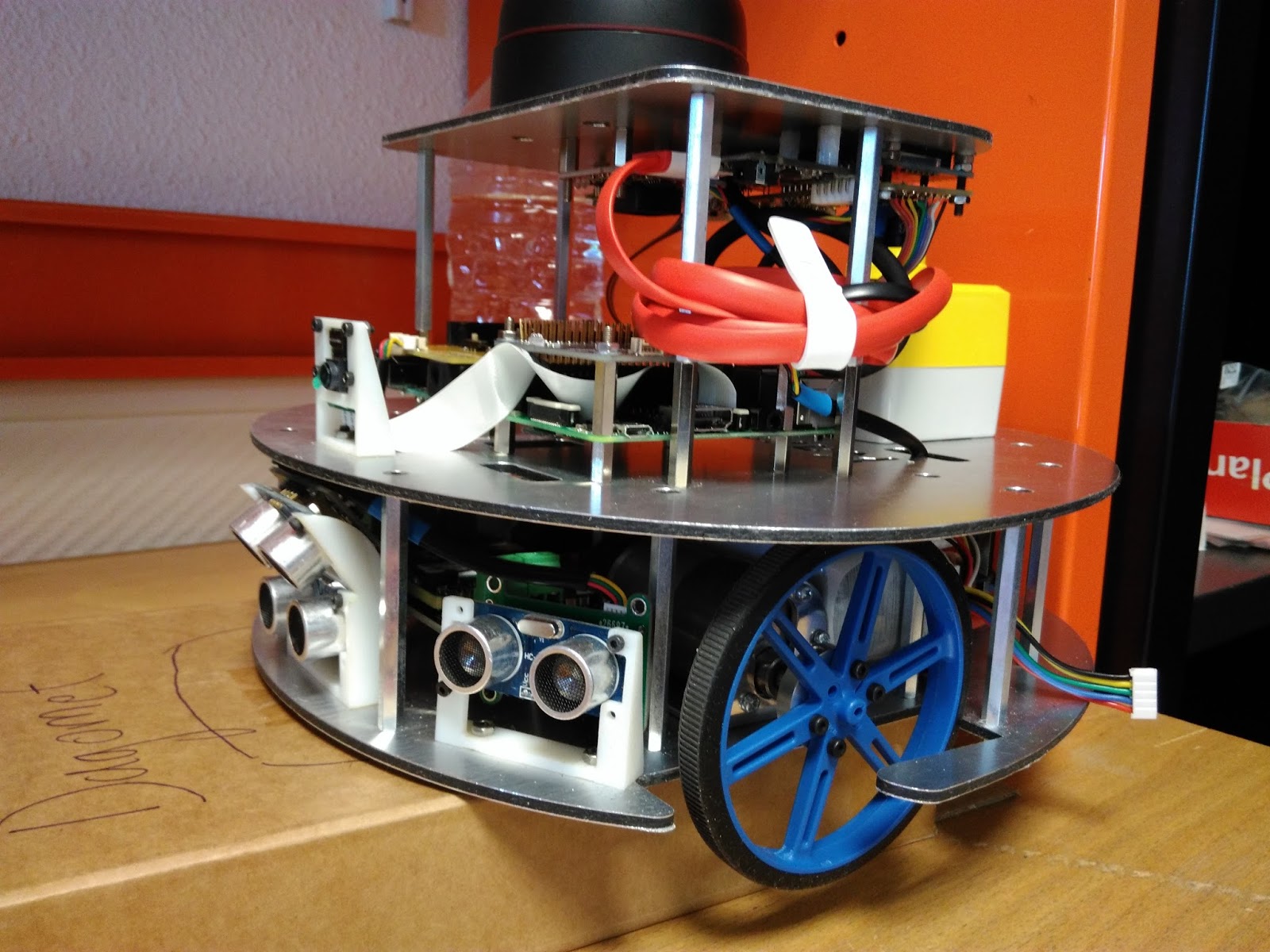
Une fois cet essai réussi nous sentons que le prototype avec les capteurs analogiques est viable. Nous arrivons à écrire sur un document numérique les informations que les capteurs collectent. La prochaine étape est d’avoir un système portatif. Nous commençons par utiliser une carte mémoire (carte SD précisément), elle permet de stocker l’information pour la traiter une fois l’essai terminé. Mais l’objectif est d’offrir au coureur, ou à son entraîneur, la possibilité d’avoir en temps réel les informations de la course. C’est pourquoi nous nous sommes équipés d’un module d’envoi de données sans fils. Au final, nous obtenons une chaussure connectée à un téléphone.
Il y a deux possibilités : utiliser un module Wifi ou un module Bluetooth. Carte SD – module Wifi
Carte SD – module Wifi
Il y a deux possibilités : utiliser un module Wifi ou un module Bluetooth.
 Carte SD – module Wifi
Carte SD – module Wifi
RESTITUER L’INFORMATION
Application
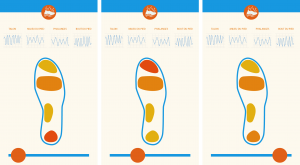
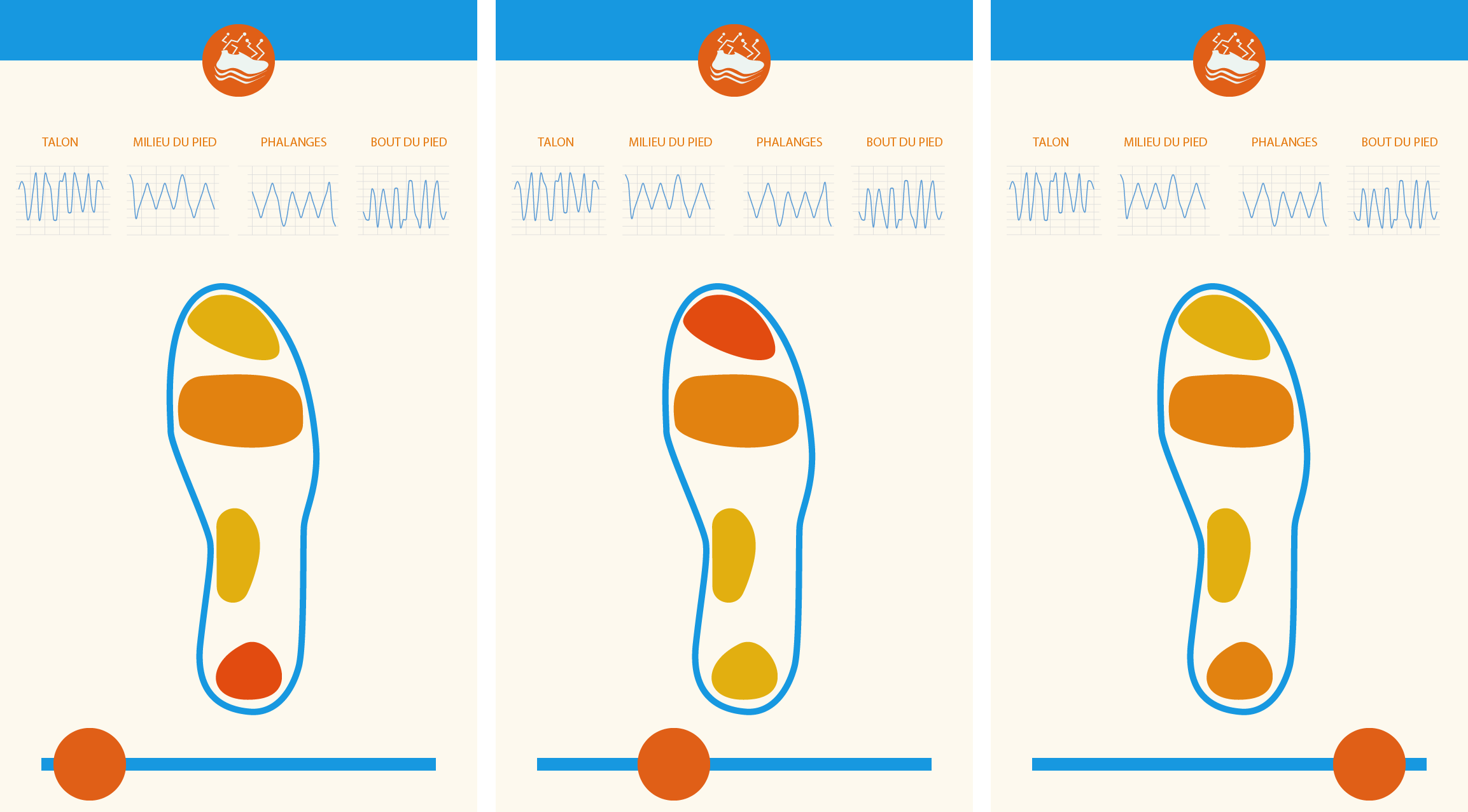
Vous avez ci-dessus une idée de l’application avec un graphique par capteur analogique qui montre la moyenne sur la course de cinq foulées, avec le comportement des capteurs au cours du temps (la molette en bas permet de faire varier la date d’enregistrement).
Nous voici au dernier virage de la piste, nos deux prototypes en main, ou plutôt aux pieds, nous voulons profiter de ces dernières lignes pour vous remercier de nous avoir lu ! FIN
FIN
Nous voici au dernier virage de la piste, nos deux prototypes en main, ou plutôt aux pieds, nous voulons profiter de ces dernières lignes pour vous remercier de nous avoir lu !
FIN

 ).
).