
Bonjour, nous sommes deux étudiants en deuxième année préparatoire intégrée de Polytech Angers. Nous avons décidé de nous lancer dans la conception d’un robot mobile de cartographie, enfin pour être plus précis dans l’élaboration de son châssis. Le but est d’avoir un robot qui puisse accueillir différents capteurs pour acquérir des données, pour par exemple avoir une représentation 3D de l’intérieur du bâtiment de Polytech Angers.
Un robot comme celui-ci dans le milieu professionnel peut avoir plusieurs utilisations. Par exemple, nous avons découvert dans nos recherches un robot aspirateur qui cartographie votre maison pour pouvoir mieux la connaitre et mieux l’aspirer. Vous imaginez donc qu’il y a d’autres utilisations possibles.
Il y a eu plusieurs étapes durant la réalisation de ce projet. On a dû d’abord préparer les bases.
Les schémas fonctionnels :
Nous avons eu un cahier des charges à respecter. Le robot devait faire une certaine taille, pouvoir accueillir un certain nombre de capteurs plus ou moins différents, etc.
Il a fallu faire des schémas fonctionnels, pour savoir comment aller communiquer les différentes parties du robot et aussi pour définir ces parties. On a donc eu accès aux fiches techniques des moteurs, de la carte mère et des capteurs pour pouvoir savoir comment tous ces éléments allaient communiquer.
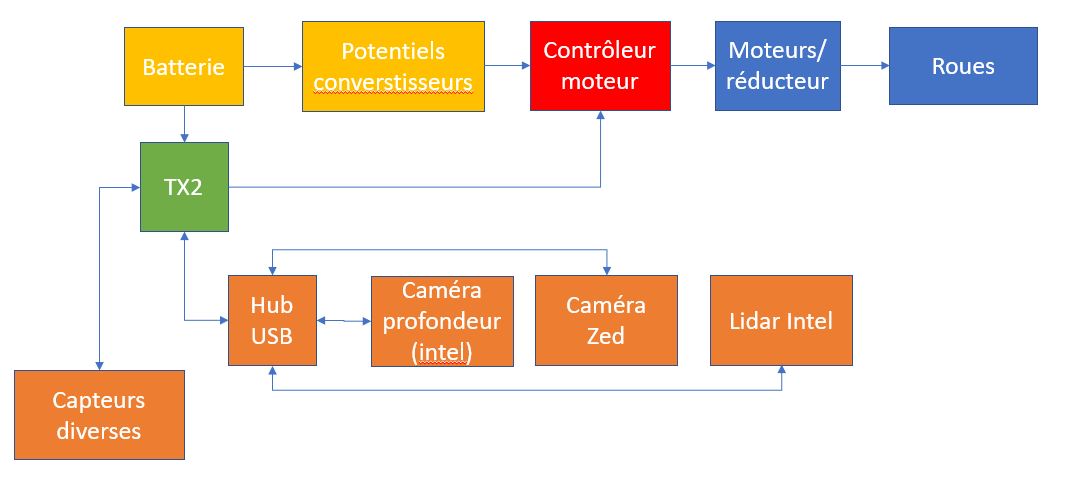
Ici on voit comment les différents éléments communiquent entre eux
Le dimensionnement de la batterie :
Après avoir réalisé ces schémas, on avait accès à pas mal d’informations techniques sur les différents éléments. On a donc pu dimensionner la batterie, c’est-à-dire savoir quel voltage et quelle intensité il fallait pour que le robot fonctionne pendant une durée déterminée. Pour cela, nous avons donc pris les informations techniques de chaque composant et fait un calcul.
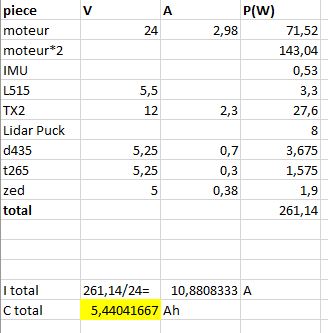
Grâce à Excel on a pu rentrer différentes informations et avec des formules trouver les bonnes dimensions pour la batterie.
Ici, on avait besoin de 30 minutes d’autonomie et l’on arrive à 5400 mAh, ce qui équivaut à environ deux fois la batterie d’un téléphone moyen. On arrivait aussi à un certain voltage et à une certaine tension, on a donc dû trouver des convertisseurs pour alimenter les différents composants du robot, car ils n’ont pas tous besoin de la même tension/courant.
La CAO :
La plus grosse partie du projet. On avait posé les bases, il fallait ensuite élaborer le corps de ce robot. On a donc utilisé un logiciel de CAO pour faire cela. On voulait faire un robot à plusieurs étages avec une petite tour tout en haut pour accueillir le capteur le plus important, le Lidar. On voulait faire un étage inférieur pour accueillir les moteurs, la batterie et la carte mère, puis un étage supérieur avec plusieurs emplacements pour pouvoir poser différents capteurs.
Le premier résultat que nous avions à montrer avec en bleu la petite tour surmontée du Lidar.
Après consultation avec nos professeurs, il y avait plusieurs défauts à corriger. Les deux gros points à corriger étaient l’emplacement des capteurs qu’on devait centraliser puis aussi l’originalité, car notre châssis n’apportait rien de spécial. On est donc reparti trouver des idées et après plusieurs essais, on a enfin trouvé une bonne solution pour corriger tous les défauts. On a donc décidé de changer la forme pour faire un robot avec une forme plus ovale, avec les deux roues motrices au centre, pour pouvoir avoir un réel centre pour placer les capteurs. Aussi, on a pris la décision de faire étage inférieur pour les moteurs et la batterie, puis un étage moyen pour la carte mère. Enfin, on a pensé à un troisième étage qui accueillerait un tour modulaire qui elle-même accueillerait les différents capteurs.

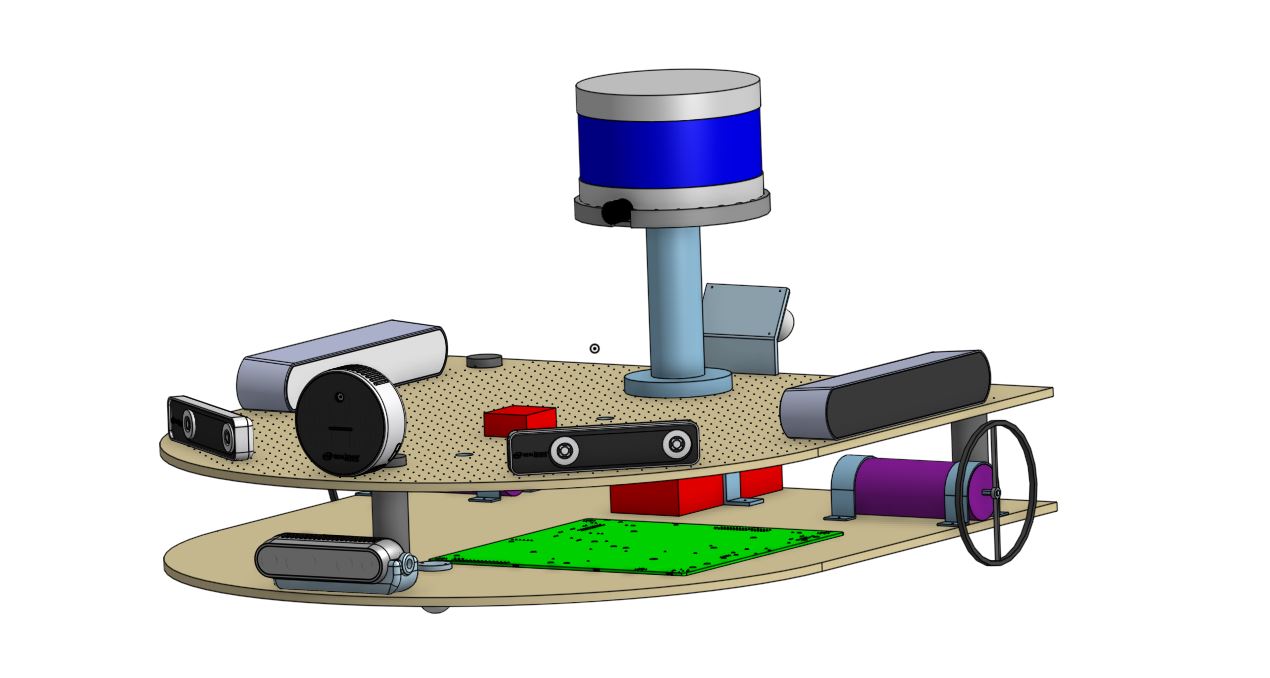
La nouvelle proposition du robot, avec en vert la carte mère, en marron foncé les différents étages à capteurs.
Le principe de cette tour, c’est d’avoir des étages qui s’emboitent facilement, sans vis et sans collage, pour pouvoir en enlever ou en rajouter à notre guise.
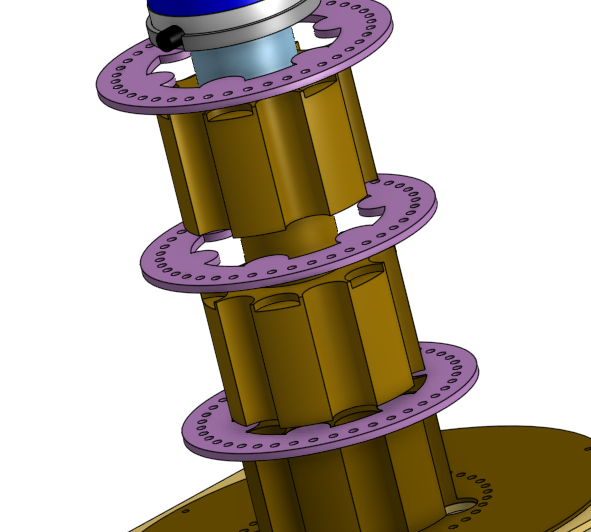
Ici on voit une vue éclatée des étages à capteurs avec en marron les troncs, et en violet les “terrasses” à capteurs.
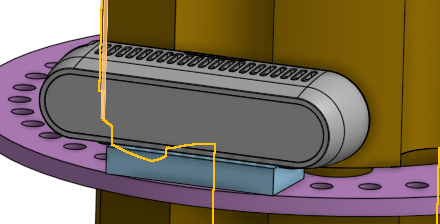
Le capteur en gris a son adaptateur en bleu qui s’emboîte dans la “terrasse” à capteurs
Pour finir, on a fait un adaptateur pour le Lidar pour qu’ils puissent s’emboîter tout en haut de la tour, quel que soit le nombre d’étages. Aussi une petite astuce pour pouvoir faire passer les différents fils entre la carte mère et les capteurs a été de creuser des demi-cercles tout autour des troncs.
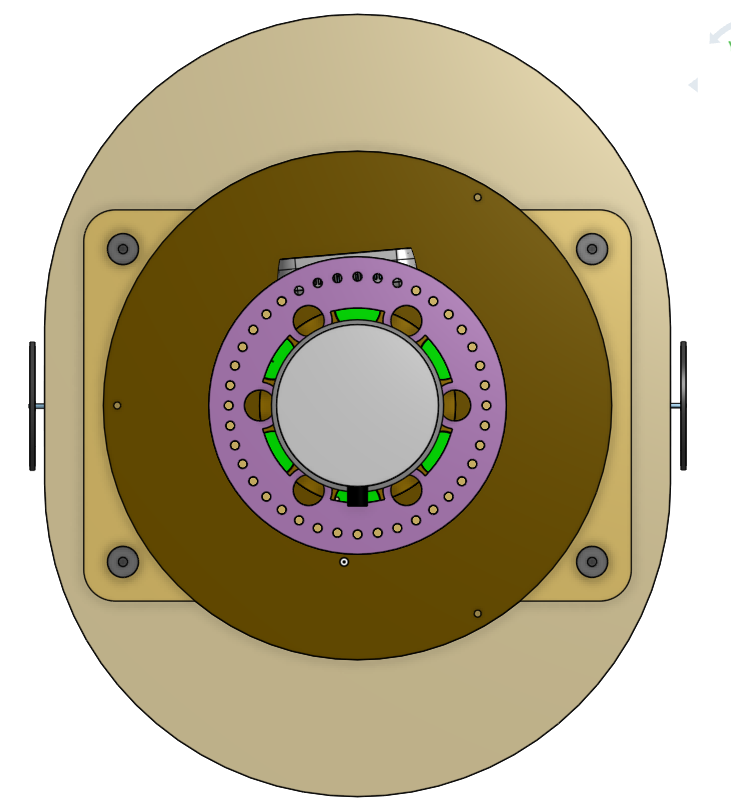
On voit ici en vue du dessus que même tout en haut de la tour on a accès à la carte mère en vert plusieurs étages plus bas.
Conclusion :
Pour finir le robot, il aurait fallu avoir plus de temps pour réaliser les différentes pièces nécessaires. Le but était de réaliser un châssis qui puisse accueillir différents capteurs et l’on a pu au moins le concevoir en CAO. Le travail des prochaines équipes, s’il y en a, sera de le construire et de le faire rouler, pour acquérir différentes données. Grâce à ce projet, nous avons appris beaucoup sur la conception d’un robot, et toutes les contraintes mécaniques et électroniques que cela implique. La plus grande difficulté sera celle d’avoir eu besoin de se remettre à l’utilisation d’un logiciel de CAO, mais c’est revenu avec le temps. On aurait aimé pouvoir construire le robot et pouvoir toucher à la partie informatique/électronique plus en profondeur, mais cela sera pour une autre équipe d’étudiants.
Merci d’avoir lu notre article !
Par Antoine Verin et Macine Benmansour.