
Bienvenu.e.s,
Nous, Bérangère Daviaud et Laura Texier, sommes deux étudiantes d’EI2 à l’ISTIA – Université d’Angers et dans le cadre de notre quatrième semestre, nous avons du réaliser un projet. Intéressées par la filière robotique et informatique et sensibles à l’art, notre choix s’est porté sur le projet Kinetic Art. Pour visualiser en quoi ceci consiste, voici une vidéo :
L’objectif premier de ce projet a été de créer un module constitué de servomoteurs, de capteurs et d’une arduino, puis de faire en sorte de pouvoir positionner chaque balle de chaque moteur à une certaine hauteur, grâce à l’indication du capteur associé ; puis de faire communiquer une carte raspberry pi avec l’arduino pour définir la hauteur des balles. Le second objectif, s’il restait du temps, était de modéliser et concevoir plusieurs modules, puis de les faire communiquer ensemble.
- Arduino
- Conception
- Raspberry PI
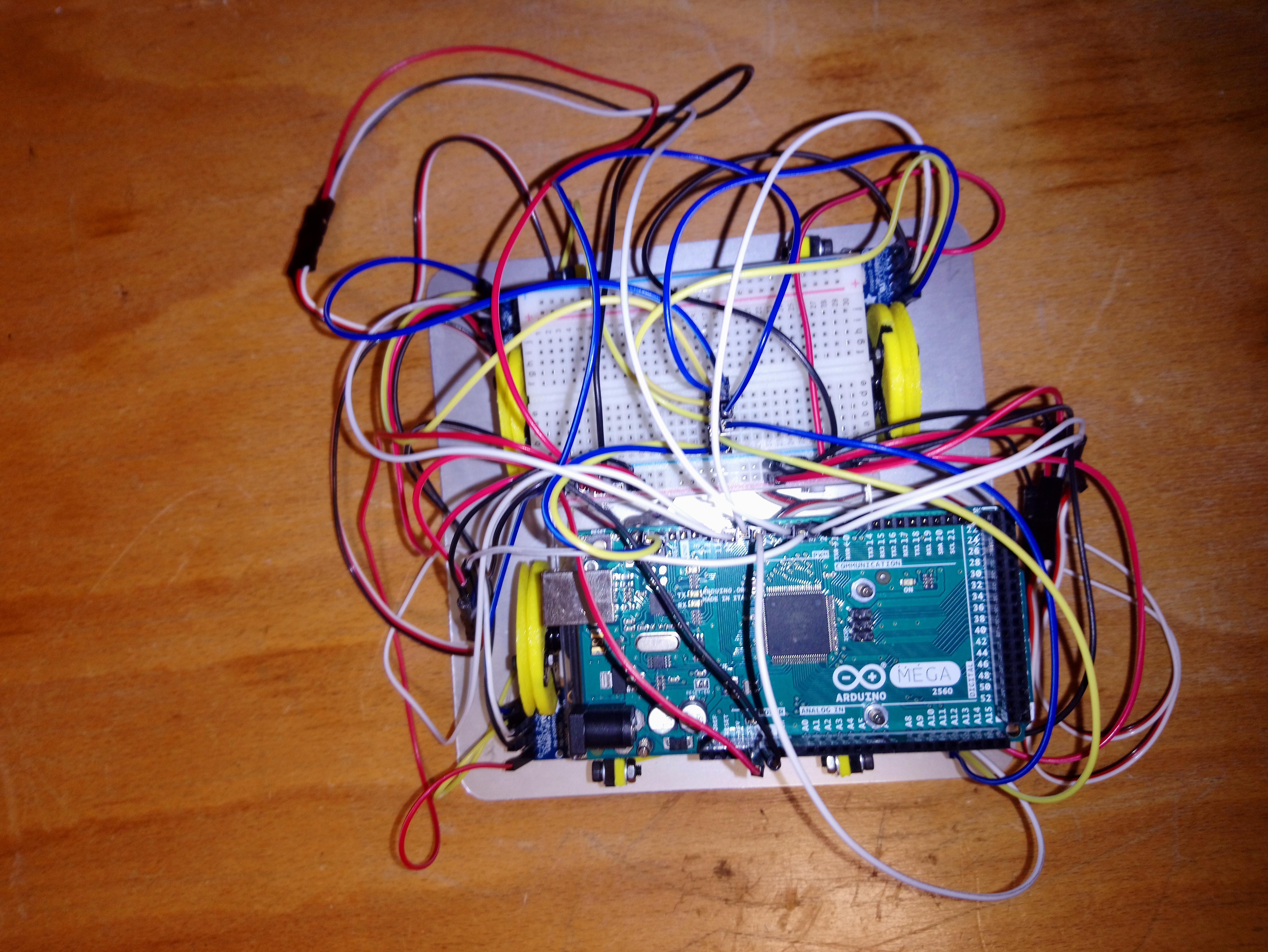
Kinetic Art (vue du dessus)
Nous avons commencé avec une carte arduino, qui nous a servi à créer un programme d’initialisation des capteurs de distance VL53L0X. Le programme fonctionne de la manière suivante : on éteint tous les capteurs, puis on les rallume un par un en leur attribuant à chacun une adresse. Ensuite, nous sommes passées à l’initialisation des servomoteurs, dans laquelle on demandait au moteur de placer, à l’aide des capteurs, chaque balle à la même hauteur.
Afin de travailler avec un bus CAN, nous avons conçu un deuxième module. Pour ce faire, nous avons modélisé sous solidworks les pièces nécessaires. Puis nous les avons conçues, à l’aide des machines disponibles au FabLab (charlyrobot, imprimante 3D et fraiseuse). Nous avons également soudé les composants d’un SHIELD.
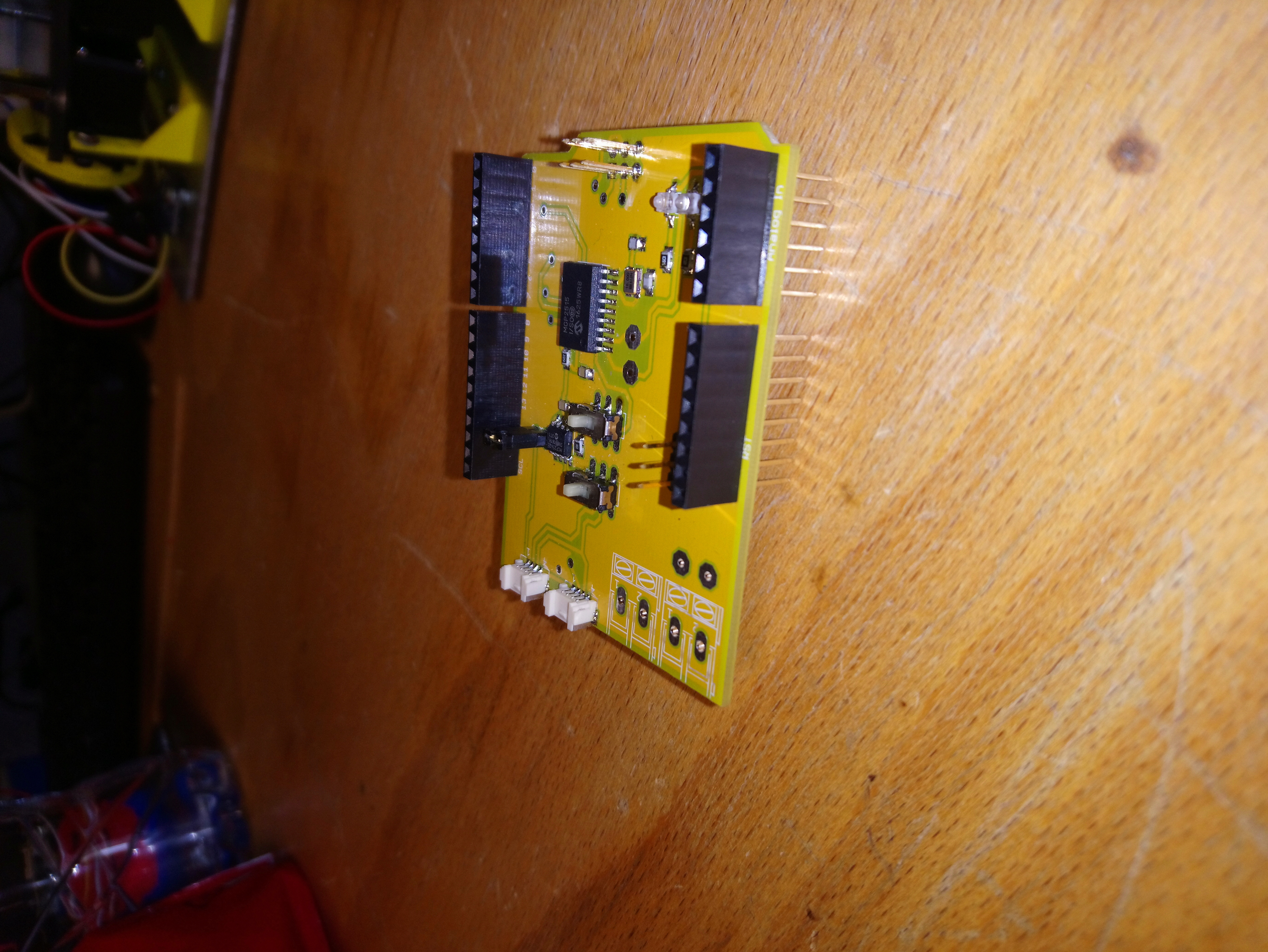
SHIELD assemblé par nos soins
Notre Rasppberry PI, fonctionnant sous LINUX, a nécessité une configuration, trouvable ci-dessous :
Réglages de la Raspberry :
https://github.com/IstiaMecatroniqueClub/Tutorials/wiki/1-Setting-up-the-Raspberry-Pi-3-Lubuntu-Operating-System
Mise en place du bus CAN :
https://github.com/IstiaMecatroniqueClub/Tutorials/wiki/2-Setting-up-the-CAN-Bus-module
Nous avons défini la raspberry comme “expéditeur” de données et les arduinos comme receveurs. Nous avons également mis en place un système d’identifiant, afin que chaque arduino n’interprète que les commandes lui étant destinées. Nous avons également fait en sorte d’avoir une “commande nulle” : si la commande envoyée à un moteur est égale à zéro, celui-ci ne bouge pas la balle.
Voici le rendu final de notre projet, lorsqu’un moteur reçoit plusieurs commandes à la suite :
Le résultat final est conforme avec le cahier des charges car nous avons réussi à finir un module et à le piloter. De plus, nous avons dépasser les attentes des tuteurs en concevant un deuxième module et en réalisant une communication bus CAN. Cependant il serait possible d’améliorer le projet en utilisant des servomoteurs de meilleure qualité et en créant un boîtier afin d’éviter que les fils se prennent dans les poulies.
Nous remercions nos tuteurs, M. Guyonneau et M. Mercier de nous avoir guidées.