Conception de pièces de liaisons adaptables sur pièces LEGO®
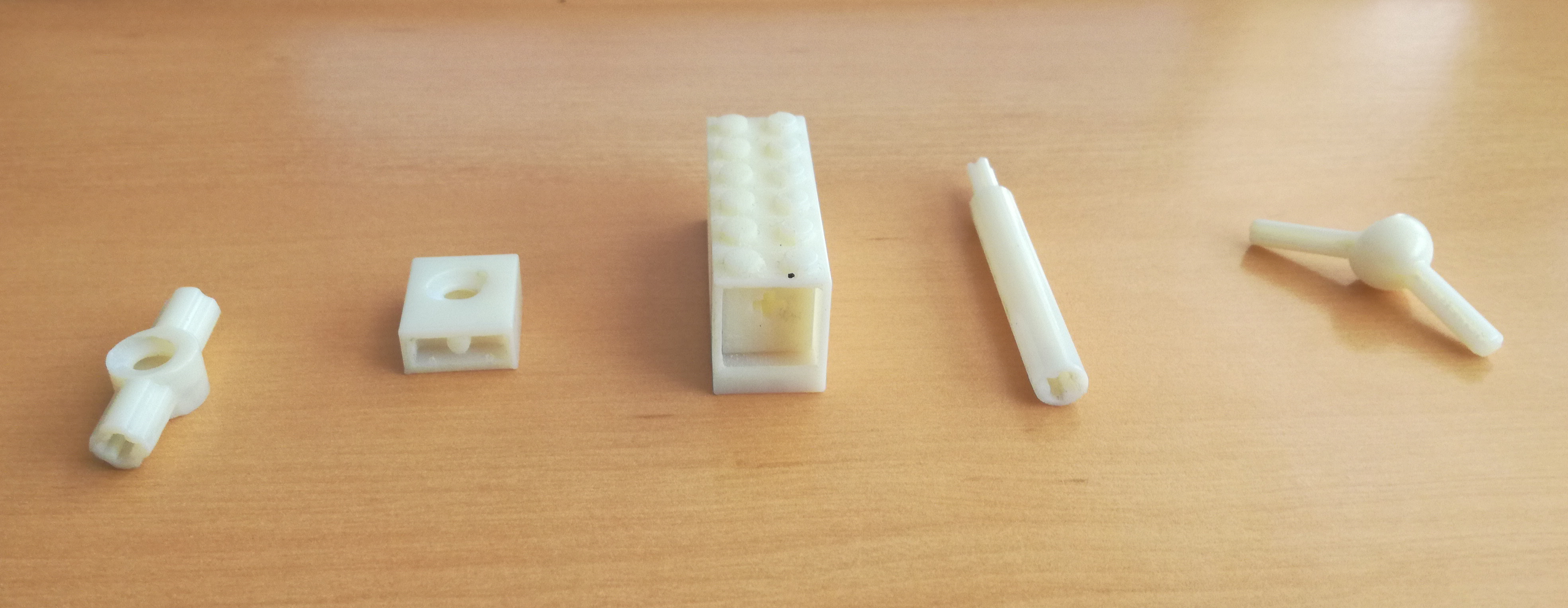
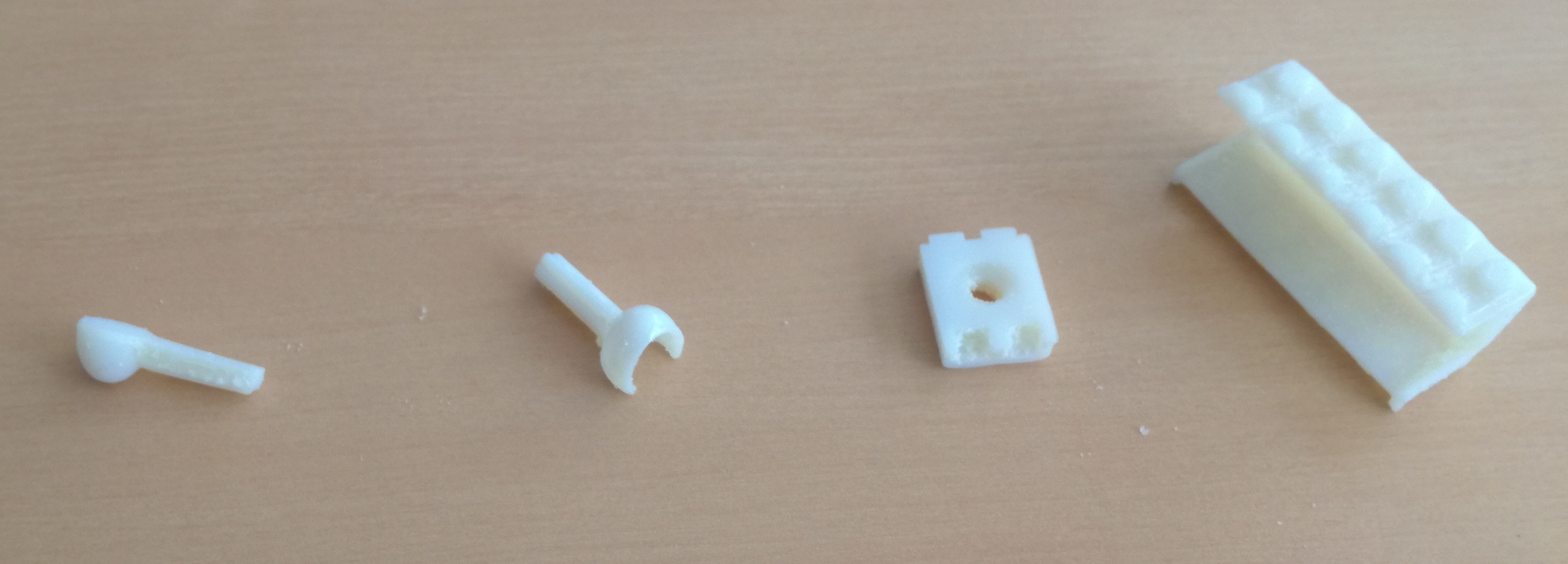
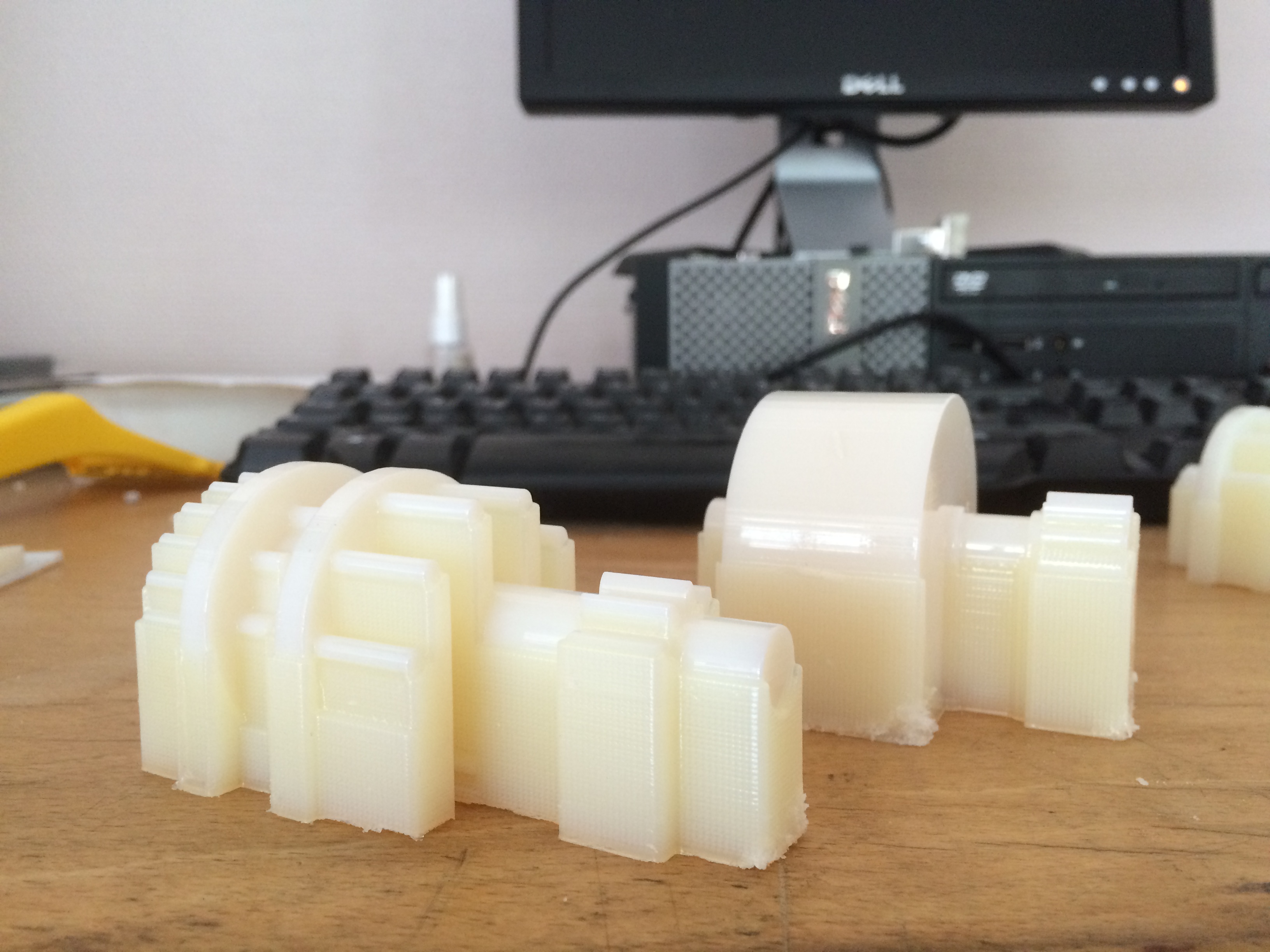
Rendu final des pièces
Nous sommes 3 élèves : Felix Bessonneau, Colin Fléchard et Dorian Clermont, issus du cycle préparatoire de l’ISTIA en 2ème année en charge d’un projet :
Ce projet Ei2 sur les liaisons mécaniques LEGO® s’inscrit dans le cadre de notre 4ème semestre, dans l’unité d’étude n°5 : Projets de conception.
Il fait suite aux difficultés rencontrées lors des cours de Génie Mécanique de 3ème année qui utilisaient les LEGO® afin de faciliter la compréhension des schémas cinématiques : en effet certaines liaisons n’étaient pas réalisables de façon simple.
Il s’agit là donc de travailler sur des LEGO® : quoi de plus amusant que ça ?
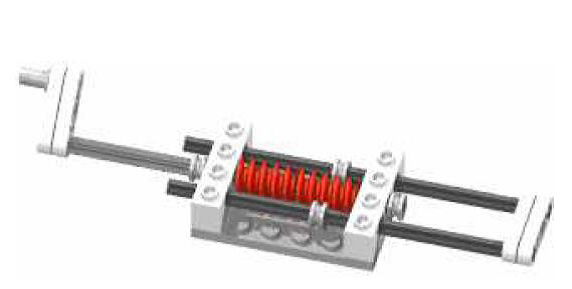
Modélisation complexe d’une liaison hélicoïdale en LEGO
La liaison glissière :
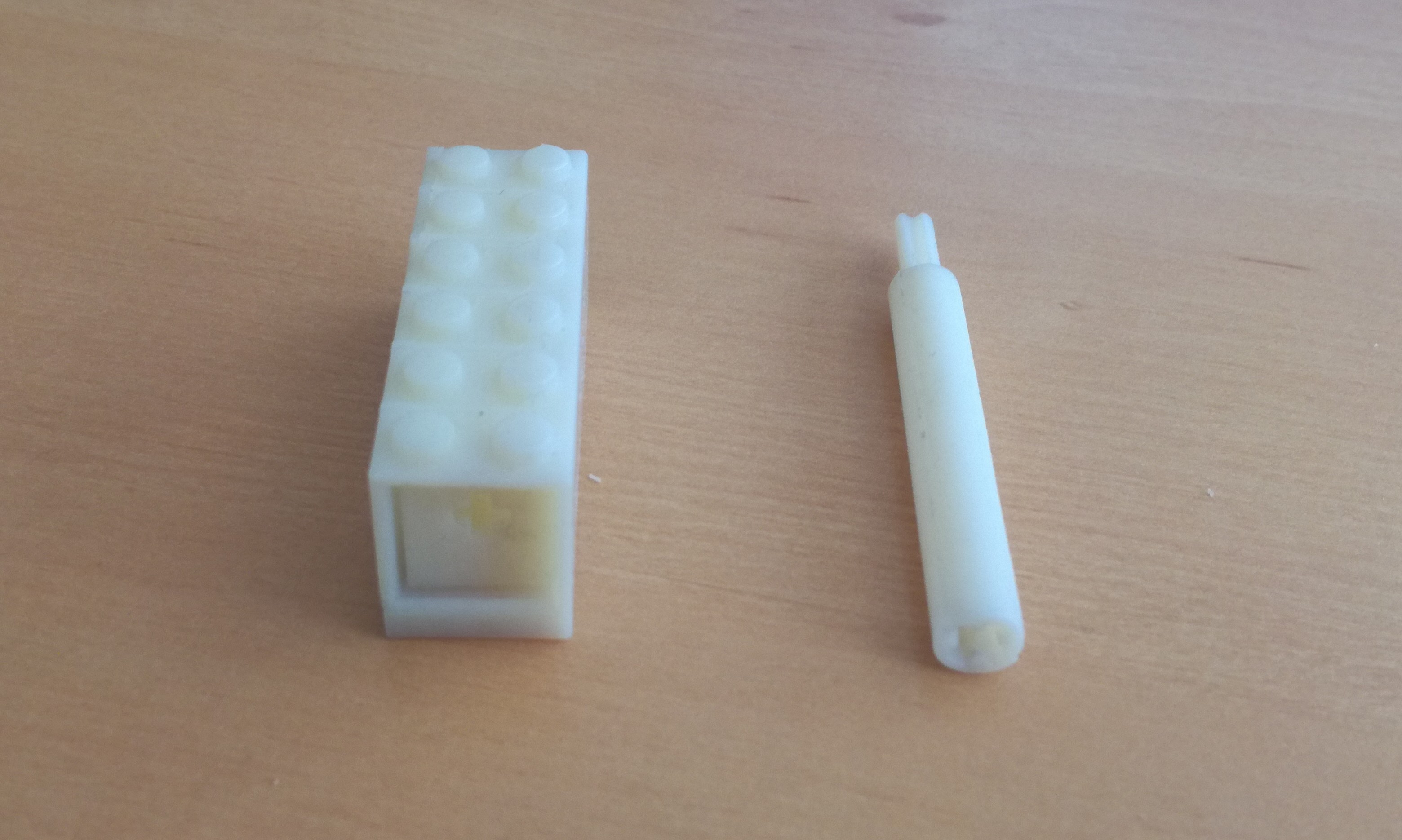
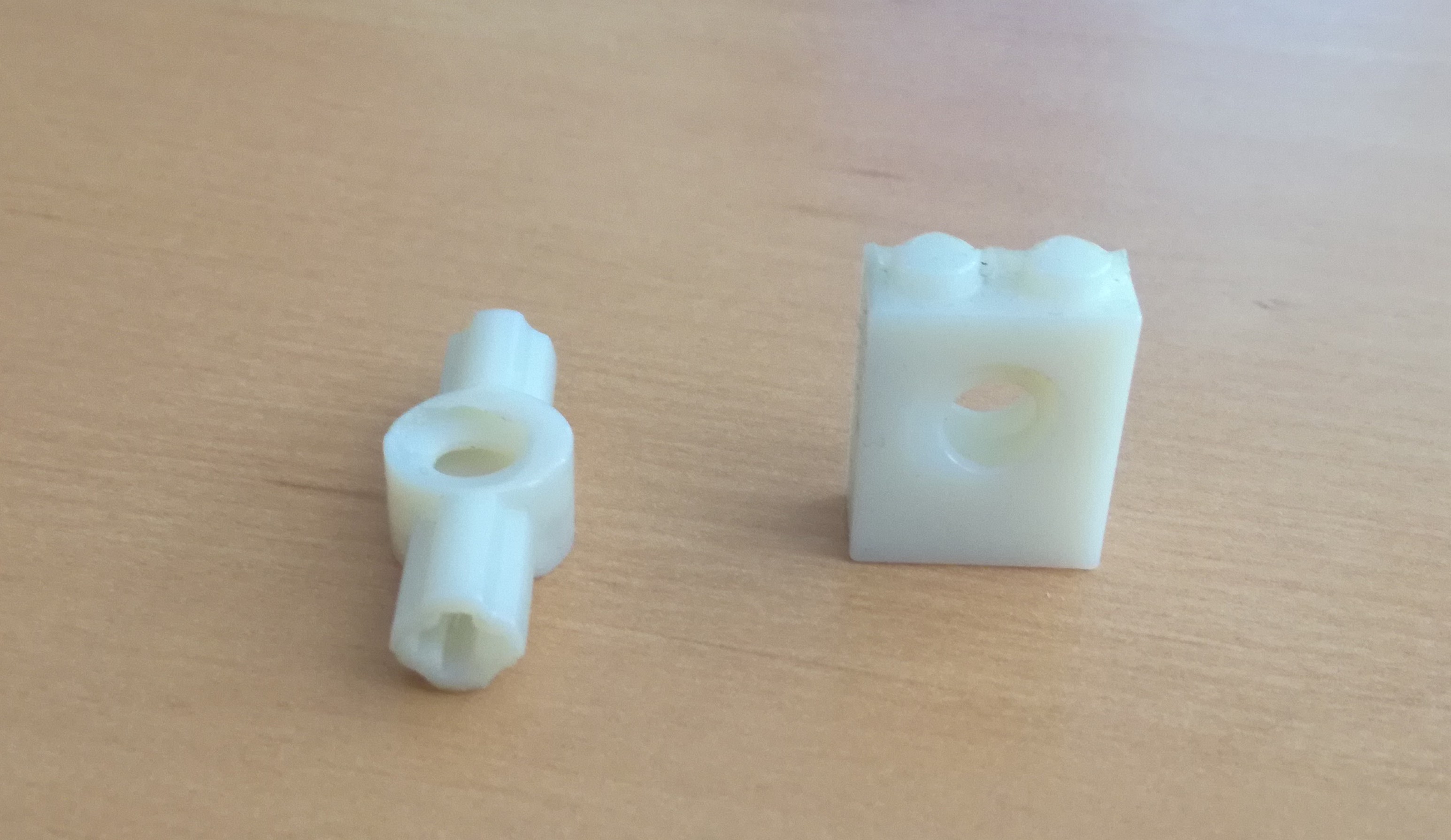
La première idée était de faire une pièce compatible avec les pièces classiques de Lego®. Le premier prototype consistait donc à faire une longue brique creuse avec à l’intérieur une pièce qui coulissait afin de jouer le rôle de glissière. Cette pièce pouvait accueillir une barre en croix. Ainsi la barre était guidée dans la brique ce qui réalisait bien une liaison. Cependant le guidage laissait à désirer et nous avons décidé de nous orienter sur une compatibilité “Lego® Technic”. Il fallait donc repartir de zéro pour créer une nouvelle pièce plus simple. La nouvelle idée était d’avoir une pièce capable de guider une barre en croix avec une seule pièce. Nous avons donc pensé à une cavité capable de guider la barre en croix et en même temps de s’accrocher à une prise femelle cruciforme.
Liaisons glissières (à droite la pièce finale)
La liaison hélicoïdale :
Tout comme la liaison glissière, l’idée première était de partir sur un bâti adapté aux briques Lego® avec en son centre un perçage de forme hélicoïdale. La première difficulté a été d’adapter ce perçage à la vis sans fin déjà existante dans les pièces Lego®. Une fois la pièce finalisée (et de nombreux essais infructueux) nous avons décidé en même temps que pour la glissière de refaire le bâti pour le rendre compatible aux Lego® Technic.
Pour cela nous avons opté pour 2 prises femelles cruciforme de chaque côté du perçage, ce qui est beaucoup plus économique niveau matière, et plus stable dans un montage.
Liaisons hélicoïdales (à gauche la pièce finale)
La liaison rotule :
La liaison rotule faisait partie des liaisons existantes en Lego® mais sous forme inadaptée à la modélisation de mécanisme. En effet il existe des sortes de rotule chez certains modèles de Lego® comme les Bionicles pour ne citer qu’une gamme de produit, mais celles-ci n’offrent pas un mouvement efficace ou une adaptabilité optimale.
Pour la création de cette liaison, notre idée fut de créer une sphère et un socle emboîtés l’une dans l’autre. Nous savions que l’imprimante 3D permettait l’impression d’une pièce dans une autre, nous en avons donc profité. Pour l’adaptabilité de cette pièce nous avons choisis des embouts cruciformes mâles pour la sphère et le socle. Nous avions trouvé les dimensions Lego® des pièces cruciformes mâles sur internet, nous les avons donc reportées sur Solidworks. La difficulté principale était la détermination du jeu entre la sphère et son socle, celui-ci devait être assez grand pour que la matière friable de l’imprimante 3D puisse être retirée mais assez petit pour empêcher les deux pièces de se séparer l’une de l’autre trop aisément.
Liaison rotule
Difficultés et problèmes rencontrées :
Evidemment nous avons dû faire face à plusieurs problèmes : par exemple lors de l’impression, ou lors de la gestion du jeu des pièces (par exemple pour la glissière : la pièce intérieure devait pouvoir coulisser dans le bâti sans problème).
Nous avons aussi eu quelques difficultés : notamment la complexité des pièces à concevoir sur SolidWorks (perçage de la pièce hélicoïdale).
Nous avons également eu des soucis au niveau de l’impression, comme une coupure de courant, ou encore une erreur d’impression inexpliquée, que vous pouvez voir ci dessous:
Pièces mal imprimées
(quasiment coupées en deux)
Les différents montages réalisés :
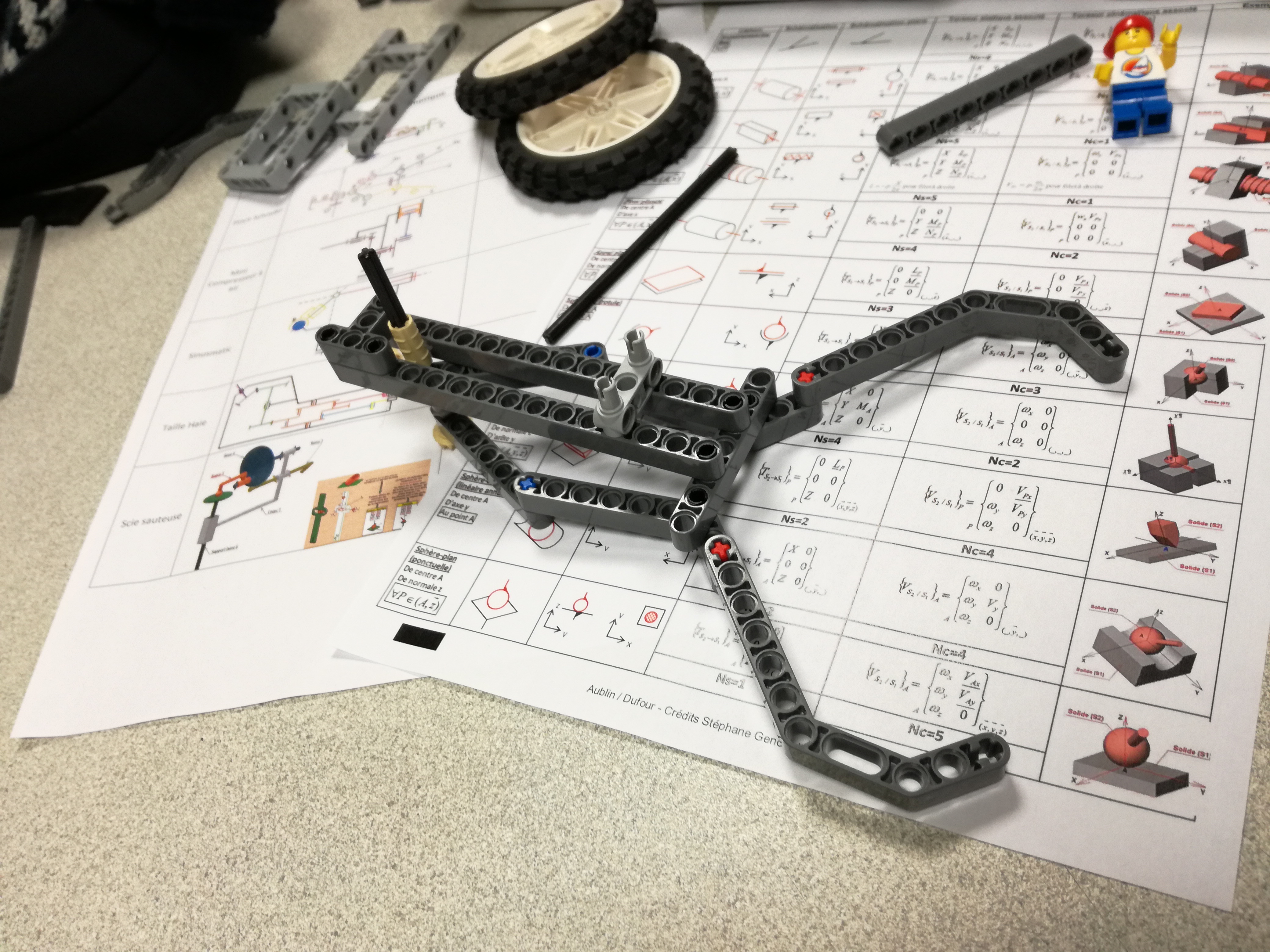
Pour la première phase de recherche des liaisons complexes, nous avons dû effectuer certains montages mécaniques plus ou moins basiques. Pour cela nous avions à notre disposition plusieurs schémas cinématiques, tel que la cale réglable, le sinusmatic, la pince schrader, ou encore un système de pompe à piston.
Nous avons passé quelques heures à réaliser ces schémas afin d’étudier quelles liaisons allions-nous devoir concevoir. C’est ainsi que nous avons remarqué que la glissière et la rotule étaient difficiles à modéliser sur le sinusmatic par exemple.
Exemple du montage : Pince Schrader
Complexité visible de la rotule & glissière
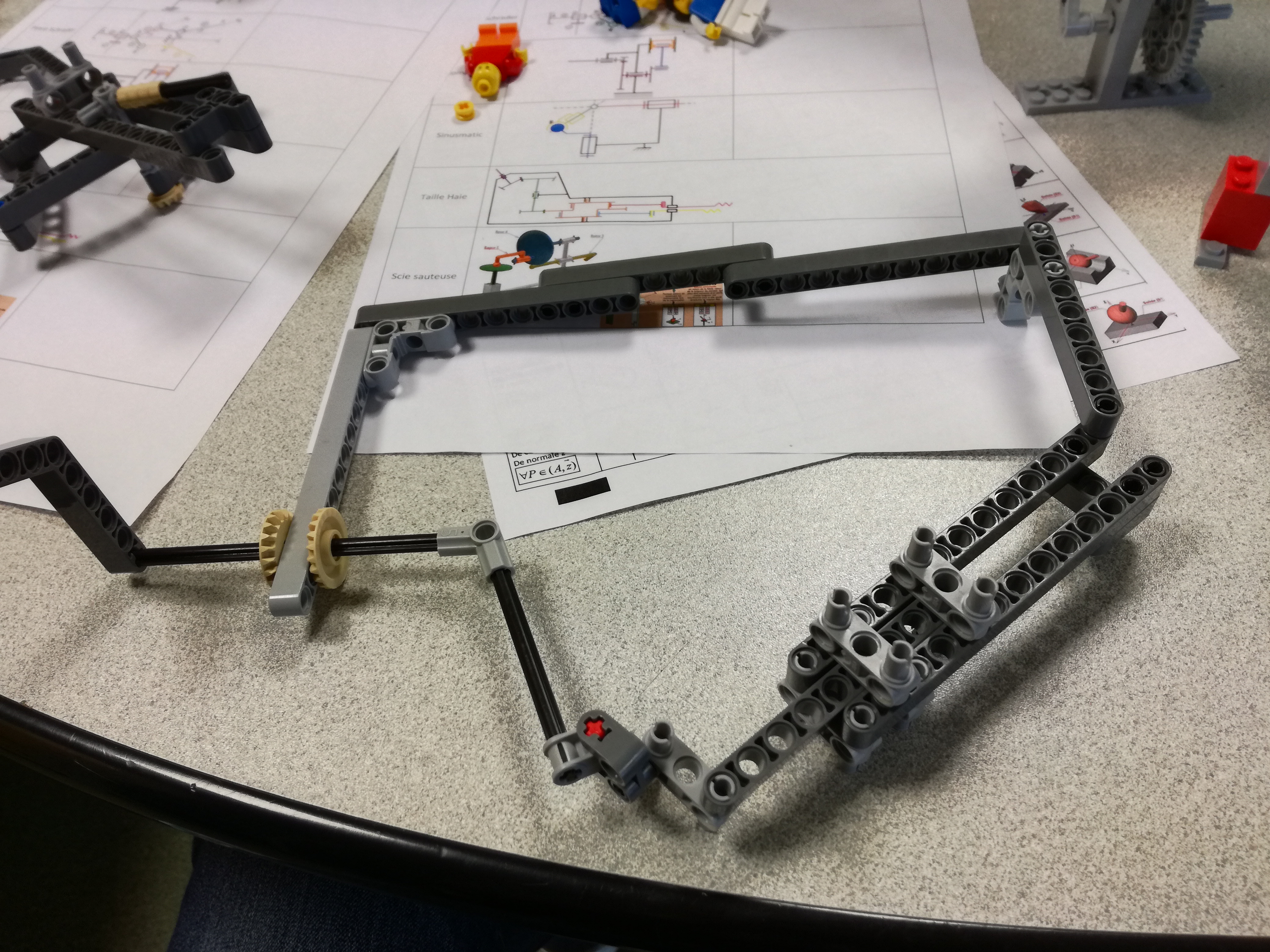
Et afin de vérifier que nos pièces conçues remplissaient leur rôle, nous avons refait quelques uns de ces montages afin de montrer qu’ils étaient plus simples à construire.
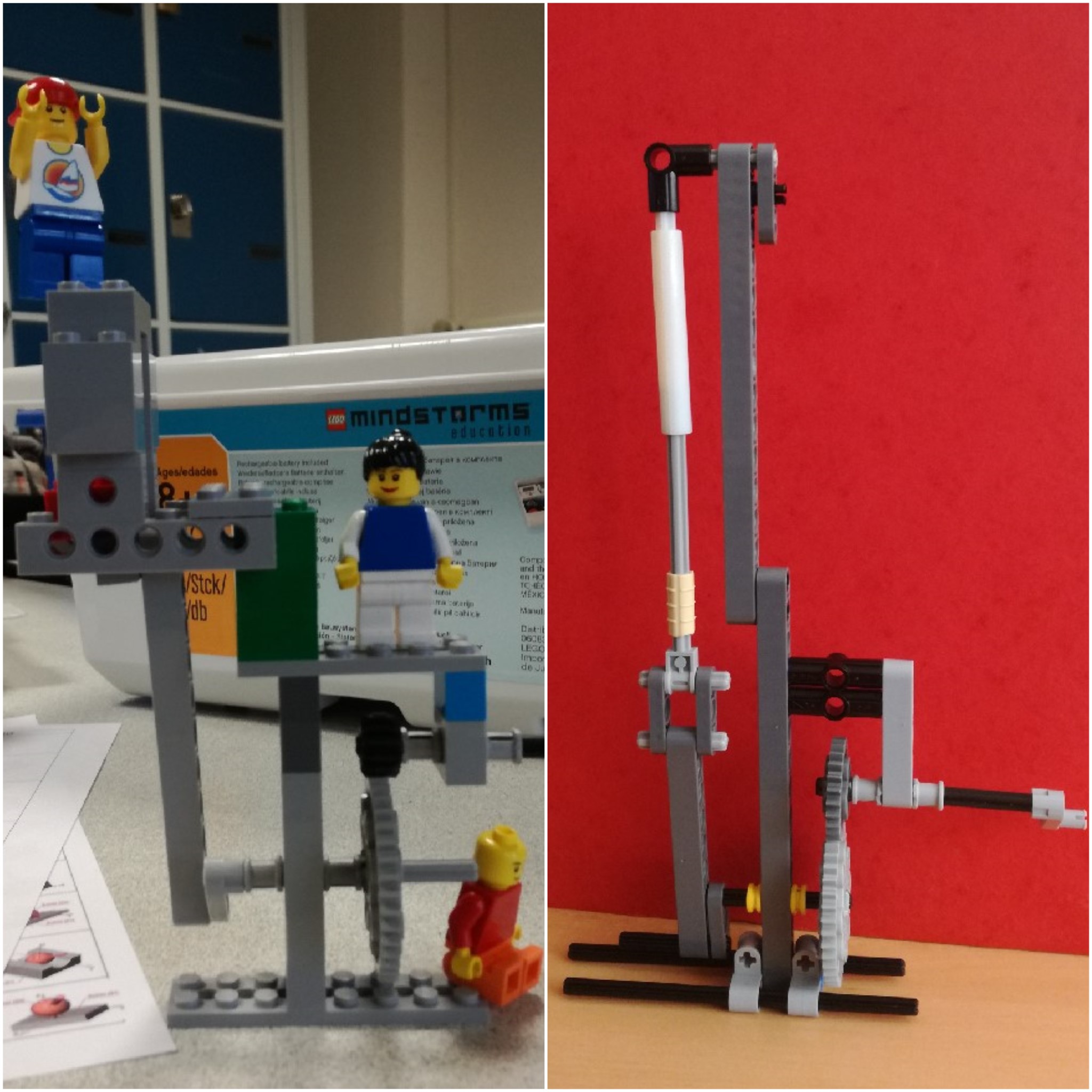
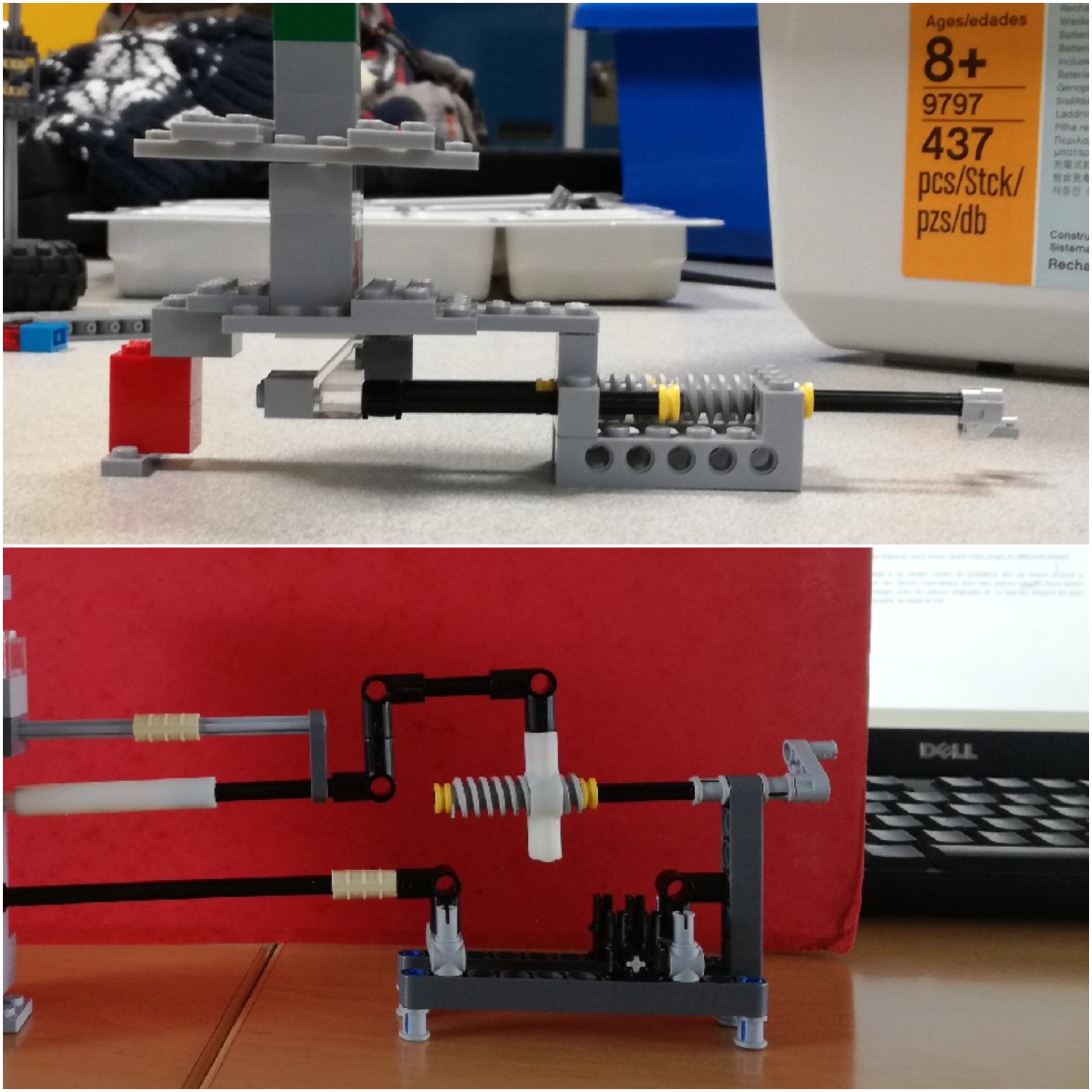
Sinusmatic : Montage initial Montage final
Pompe avec piston : Montage initial (gauche) Montage final (droite)
Cale réglable : Montage initial Montage final
Pour conclure sur ce projet, nous pouvons dire que nous l’avons beaucoup apprécié pour les nouvelles méthodes que cela impliquait : notamment le travail en quasi-totale autonomie.
Nous remercions aussi M.Verron qui a toujours été très agréable et très pédagogue !
Nous sommes un groupe de quatre étudiants, en 2ème année du cycle préparatoire, à l’ISTIA (Institut des Sciences et Techniques de l’Ingénieur d’Angers) ayant pris part, dans le cadre de nos études à un projet tutoré. Ce dernier a pour but de mettre en pratique nos compétences et de développer nos capacités à travailler en équipe. Dans le panel de sujets proposés, un en particulier a retenu notre attention : la Pascaline. Cet article a pour objectif d’exposer et de partager les différentes étapes par lesquelles nous sommes passés pendant la réalisation de notre projet. Blaise Pascal (1623-1662), célèbre philosophe, scientifique et théologien du 17ème siècle, a, en son temps, révolutionné les méthodes de calcul, via l’invention de plusieurs machines à calculer, appelées : « Pascalines ». En effet, à cette époque, le calcul se pratique à l’écrit ou bien grâce à la disposition de multiples jetons, d’où dérivent les divers bouliers.Les machines à calculer de Blaise Pascal vont alors introduire une nouvelle méthode de calcul, automatique et éliminant les possibles erreurs de comptage : le calcul mécanique. Les Pascalines, capables d’effectuer des additions et des soustractions, garantissaient ainsi des calculs simplifiés et sans risque d’erreur, ce qui représentait une innovation sans précédent pour le siècle des lumières. Néanmoins ces dernières n’ont pas rencontré un franc succès et il faudra attendre le 20ème siècle avant que ces appareils ne soient diffusés et utilisés par la plupart des caissiers. Notre projet avait donc pour but d’étudier le mécanisme des Pascalines puis , à terme, de réaliser notre propre modèle du genre. La première étape fut donc la compréhension du système permettant aux Pascalines d’effectuer des calculs. Tout d’abord, une Pascaline est en réalité composée de plusieurs « blocs ». (source: https://upload.wikimedia.org/wikipedia/commons/3/3d/Pascaline_-_top_view_and_mechanism.jpg).
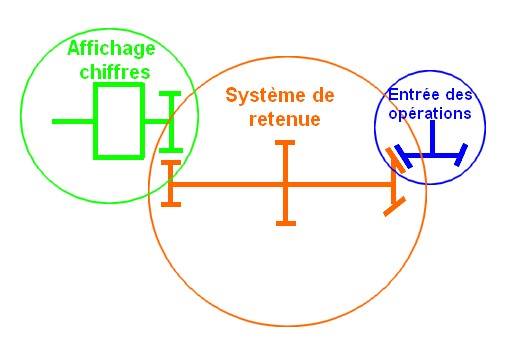
Chacun de ces « blocs » possède un arbre reliant une roue d’entrée, permettant la sélection d’un chiffre, à un rouleau affichant des chiffres de 0 à 9, ainsi que d’un système de transmission de retenue. On peut les schématiser ainsi:
Ces derniers étaient ensuite disposés côte à côte afin de pouvoir afficher un nombre. On peut alors imaginer la Pascaline effectuer des opérations avec des nombres infiniment grands, pour peu qu’elle possède un nombre de ces blocs suffisant. Grâce à un système d’engrenages, l’utilisateur pouvait tourner les différentes roues d’entrée, afin d’afficher sur le rouleau le nombre de son choix. Les chiffres de 0 à 9 gravés sur les roues d’entrée autorisaient la saisie d’un nombre de façon rapide simple. La rotation du rouleau ne s’effectuait que dans le sens horaire, ainsi on pouvait faire défiler les chiffres de 0 vers 9 mais pas l’inverse. Ceci est primordial dans la réalisation d’opérations mathématiques via cette machine. Mais tout le génie de Blaise Pascal repose dans le système de transmission de la retenue. En effet, chaque bloc pouvait transmettre une retenue au bloc en amont. Ainsi lorsqu’un rouleau effectuait un tour complet, il provoquait la rotation d’un cran du rouleau en amont, traduisant ainsi le passage d’une retenue. Voici une vidéo (en anglais) permettant de mieux comprendre ce système.
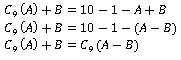
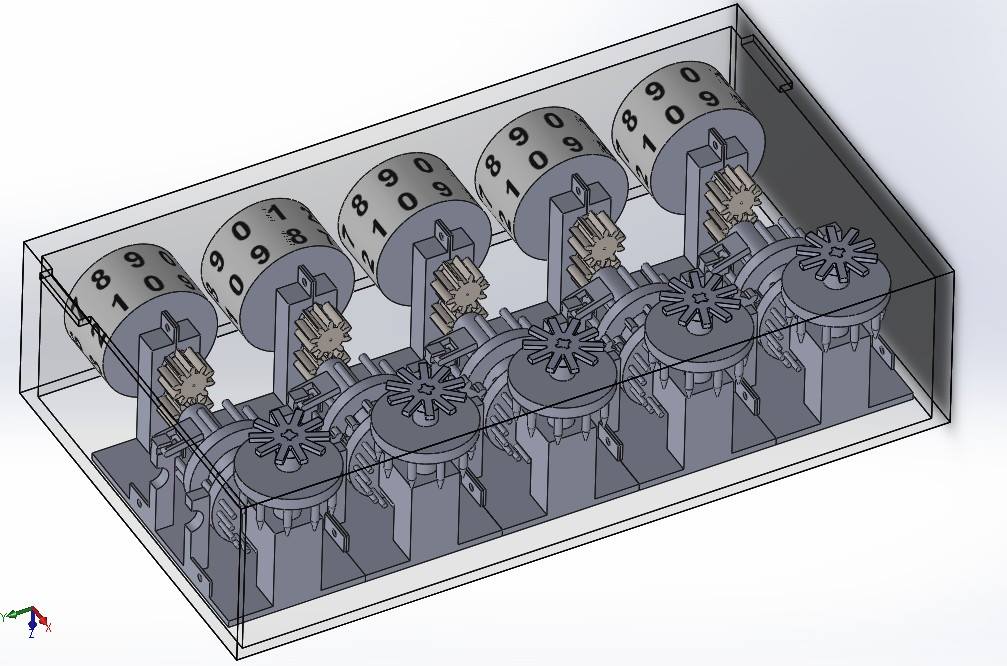
Effectuer des additions était plutôt simple. Il suffisait à l’utilisateur d’entrer le premier nombre, puis d’entrer tous les nombres qu’il souhaitait lui additionner, un par un. Les retenues, alors transmises en cascade, permettaient à la machine d’afficher le résultat de l’addition de tous les nombres précédemment entrés dans la Pascaline. Ceci dit, il était nécessaire de « remettre la Pascaline à zéro» avant d’effectuer une nouvelle opération, afin de ne pas tronquer le résultat avec le nombre « mis en mémoire » dans l’appareil. Pour parvenir à cela, il suffisait de tourner chaque rouleau, en partant de celui le plus en aval puis en se décalant d’un étage à la fois, afin qu’il affiche 9. En tournant le rouleau le plus en aval d’un cran le chiffre 9999 se transforme alors en 0000 et la machine était « remise à zéro ». La réalisation de soustraction était légèrement plus complexe. Avant de se concentrer sur la démonstration mathématique, il est important de préciser que les rouleaux présentaient en réalité deux séries de chiffres : une série allant de 0 à 9 et une autre correspondant à leur complément à 9 (complément choisi en fonction de la base de la Pascaline ici en base 10) soit des chiffres allant de 9 à 0. Le complément à 9 d’un nombre N s’écrit ainsi:Les instructions de Pascal étaient alors les suivantes : pour faire une soustraction il suffisait de rentrer le complément à 9 du nombre auquel on souhaite soustraire quelque chose, puis le nombre que l’on souhaite soustraire à ce dernier. Le résultat de l’opération correspondait alors au nombre affiché dans la série des compléments à 9 de la machine. Ceci revient donc à effectuer cette opération:Puis à regarder le complément à 9 du résultat de cette opération. Or on sait que:La Pascaline nous indique donc le nombre suivant, résultat correct de l’opération effectuée.Après nous être mis d’accord sur un design particulier, nous avons modélisé notre Pascaline sur ordinateur, via l’utilisation d’un logiciel tel que “Solidworks”. Voici le résultat : Après 3 séances de dix-sept heures, et grâce à une imprimante 3D très précise, nous avons pu obtenir les multiples pièces précédemment conçues. Il nous a fallu ensuite, enlever l’excès de matière déposée par l’imprimante 3D puis contrôler la conformité des composants ainsi acquis.
Séance d’impression:
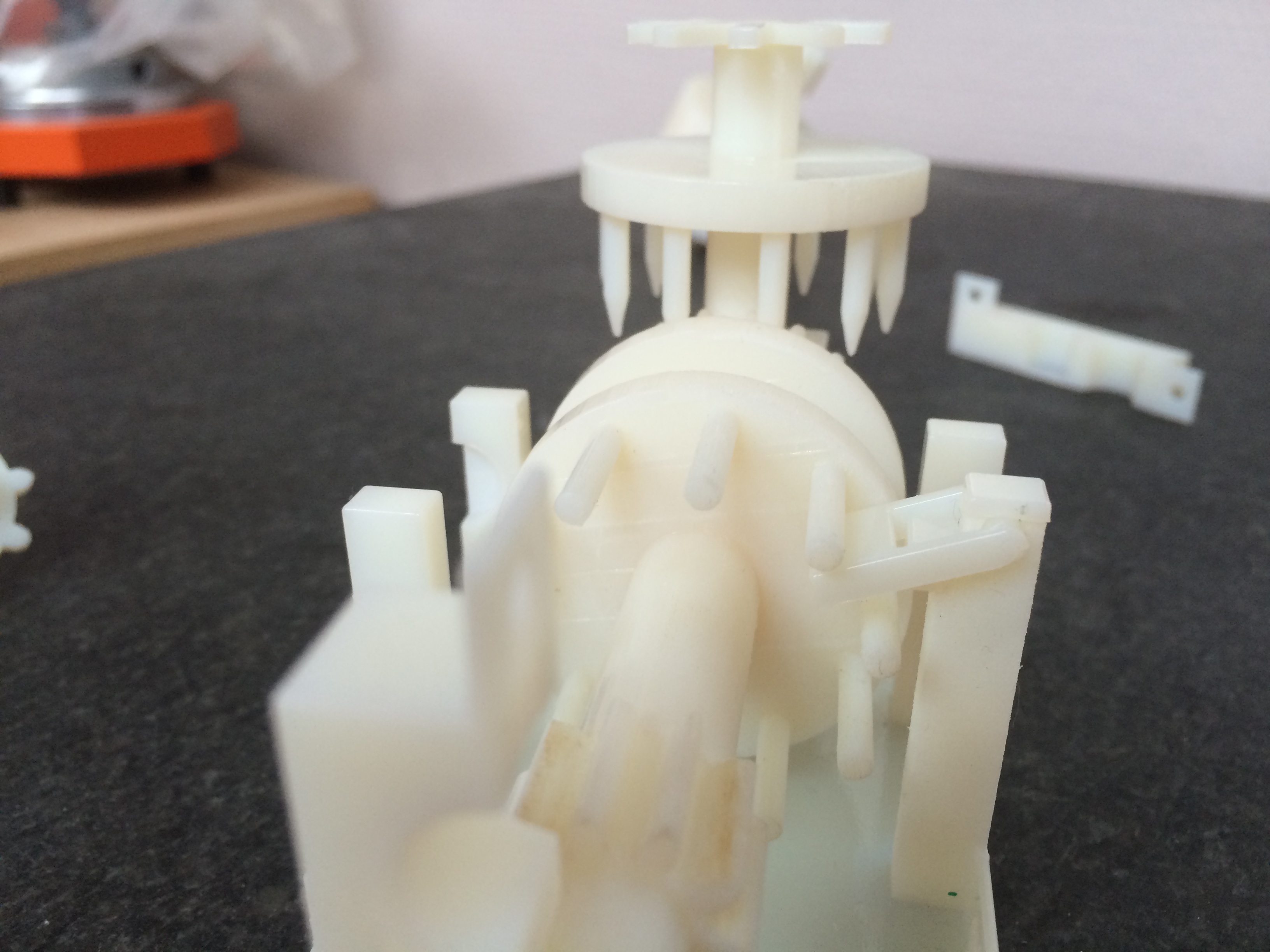
Pièce après impression 3D
Premier bloc nettoyé et assemblé
Et pour clôturer notre projet, nous avons assemblé les pièces imprimées ainsi que la boite. Pour un rendu comme vous pouvez le voir ci-dessous.