Introduction
Bonjour à toutes et à tous, dans cet article on va vous présenter le projet de conception de robot cartographe que l’on a effectué au cours de notre 2nde année au sein de Polytech Angers. Nous en sommes en groupe de trois : Swan, Emilien et Jean-Luc afin de réaliser ce projet qui a déjà été réalisé à plusieurs reprises les années précédentes (projet ROMULUX présenté via ce lien).
On va aborder maintenant la question de l’utilité de ce projet. Ce projet propose de concevoir un robot permettant l’acquisition de données pour tester des algorithmes de cartographie et de localisation. Ce projet a pour but premier de cartographier un étage complet des bâtiments de Polytech (cependant, on ne s’occupera pas du codage du robot).
Organisation
Sachant que les séances de projet de conception n’avaient pas lieu en présentiel, on a dû s’adapter et apprendre à utiliser un logiciel du nom de Gitlab. Gitlab est un outil qui permet de stocker et partager des fichiers qui fonctionne comme un cloud avec certaines spécificités telles que des checkpoints, points de contrôle, et quelques autres.
Cahier des charges
Afin de pouvoir réaliser un tel robot, il nous faudra plusieurs éléments (annoncés dans le cahier des charges) :
- Utilisation d’une carte NVIDIA Jetson TX2
- Utilisation des roues “mecanum”
- Étage modulable permettant à minima le positionnement de 4 caméras et un capteur Lidar Velodyne (qui est un radar fonctionnant avec la lumière)
Afin de réellement commencer le projet, on a tout d’abord schématisé de diverses manières ce projet. En commençant par un schéma bête à corne :
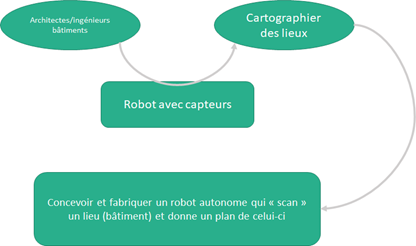
Bête à corne
Chaîne de fonctionnement
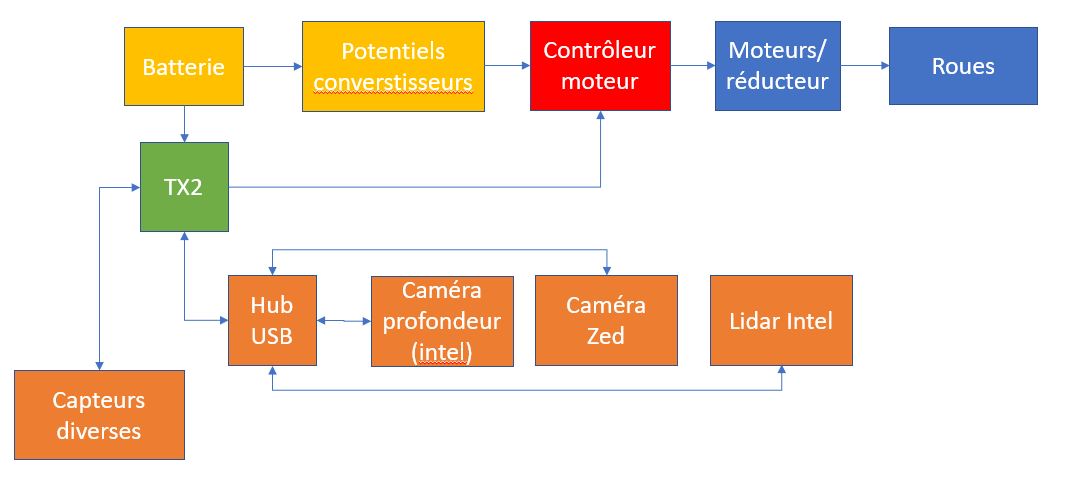
On a ensuite réalisé divers schémas exprimant la chaine de fonctionnement de notre robot cartographe. Voici le schéma principal :
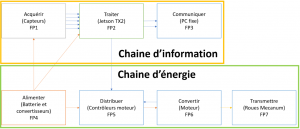
Schéma fonctionnel
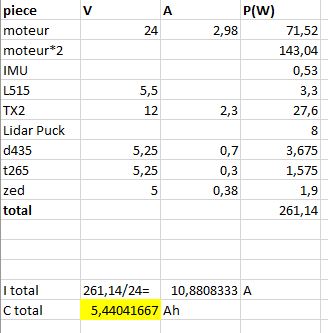
Après cela, on a réalisé un inventaire des composants afin d’être structurés, mais aussi, afin de pouvoir définir et dimensionner le type de batterie souhaitée en faisant un bilan énergétique. Finalement, on a dû opter pour des batteries NIMH, car elles correspondaient bien à notre bilan énergétique, et car le labo n’était pas adapté pour des batteries lithium-ion.
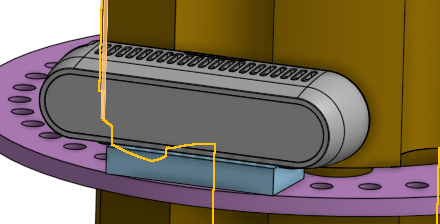
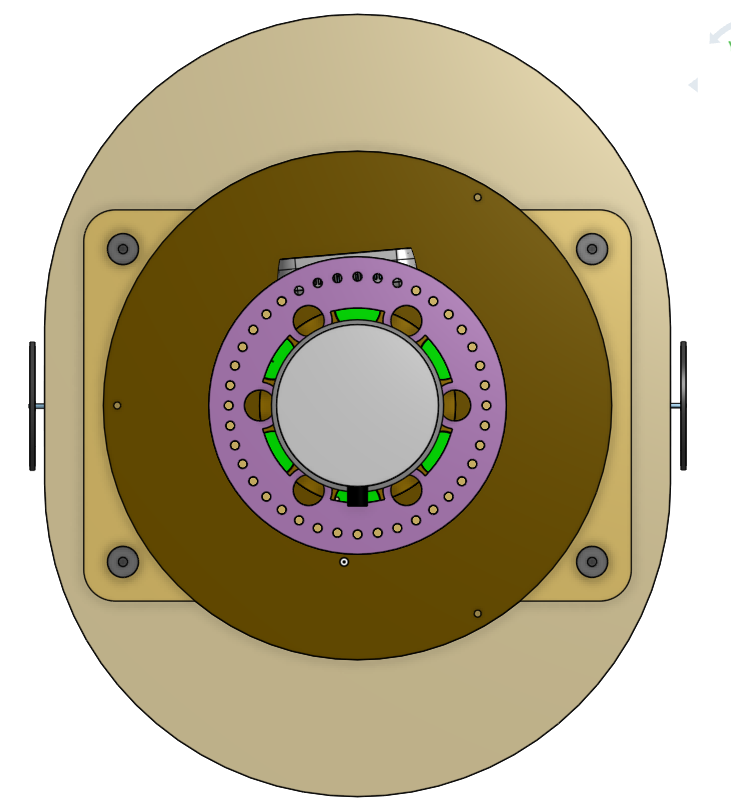
Placement Lidar Velodyne
On a dû ensuite trouver un emplacement optimal pour le radar LIDAR Velodyne (afin qu’aucun obstacle ne gêne ses rayons lumineux qui lui permettent de capter à 360° autour de lui-même).
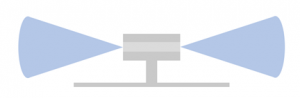
LIDAR Velodyne
Pour se faire, il suffisait de choisir où le placer sur notre robot (nous avons choisi le centre). Afin de déterminer la hauteur à laquelle le placer, il suffisait d’utiliser de la trigonométrie basique. On a donc pu obtenu facilement les coordonnées du positionnement du LIDAR Velodyne.
Matériau
Il nous manquait donc un dernier détail à régler avant d’entamer la CAO (Conception Assistée par Ordinateur) qui était le choix du matériau. Après quelques discussions avec nos encadrants, il s’avérait que l’impression 3D n’était pas une option viable pour l’architecture que l’on voulait adopter (matériaux trop fragiles) mais que l’usinage était un moyen plus adapté notamment grâce à son matériau : l’aluminium qui allait être le matériau principal constituant notre robot.
CAO
On pouvait donc enfin commencer la CAO qui était au cœur de notre projet. Tout d’abord, on a conceptualisé les divers composants constituant notre robot (NVIDIA Jetson, LIDAR Velodyne, les 4 caméras, les contrôleurs moteurs, les moteurs, les batteries, …).
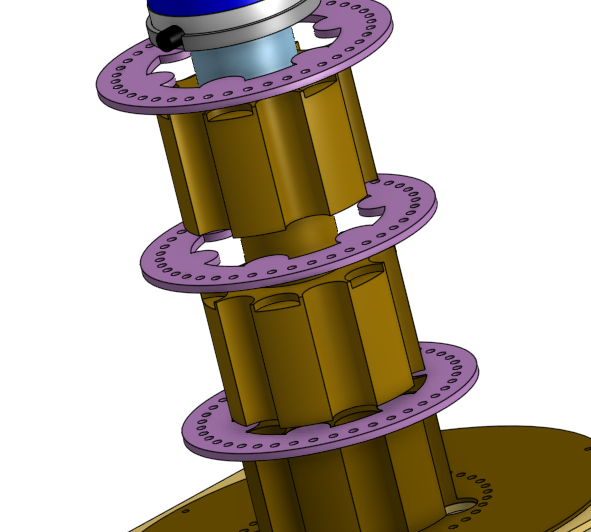
On a commencé à faire une première ébauche sur le logiciel SolidWorks ce qui nous a permis d’avoir un premier ressenti de notre encadrant sur l’architecture que l’on voulait adopter pour notre robot cartographe :
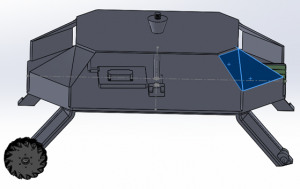
1ère ébauche du robot cartographe
Cependant, on voit clairement un manque de rigidité sur notre structure (éléments sélectionnés en bleu), une complexité hors norme au niveau des pieds de notre robot, ainsi que la hauteur entre les 2 étages qui n’est pas adaptée.
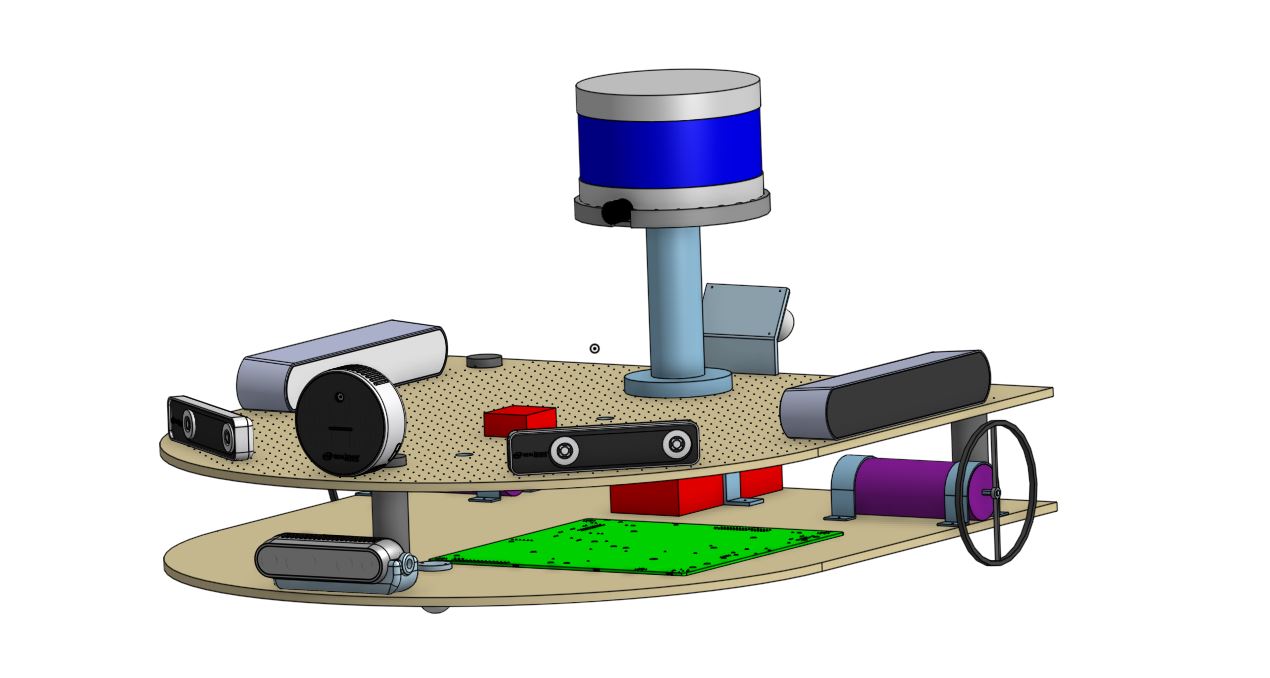
Ces problèmes ont été résolus en changeant simplement la structure des éléments problématiques, ce qui nous mena à la réalisation d’une seconde et dernière ébauche :
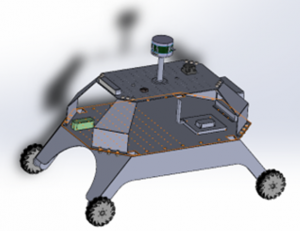
CAO finale du robot cartographe
Conclusion
Malheureusement, c’est ici que s’achève ce projet pour notre groupe car nous n’avons pas été assez efficaces afin d’avoir une réalisation physique de ce robot cartographe. Mais peut être allez-vous aboutir ce projet.
Nos remerciements vont à nos encadrants :
M. GUILLONNEAU et M. MERCIER
JOTTREAU Emilien, GAUVRIT Jean-Luc, NOBILI Swan