
Intro
Les personnes en situation de handicap cherchent à s’intégrer dans le monde professionnel, en partie par le biais des ESAT. Ces organisations proposent des activités diverses pour développer aux mieux les compétences des travailleurs en leur sein, leur garantissant une meilleure intégration professionnelle et sociale pour qu’ils soient le plus autonomes possible. Il est très important pour ces travailleurs et travailleuses de se sentir utile et intégré dans la société malgré leur déficit quel qu’il soit.
Notre projet
Dans le cadre de notre projet nous avons visité un ESAT, dans le but de rencontrer deux des travailleuses, Anne et Sophie, qui ont une déficience visuelle importante, ainsi que David Lemoal, le commanditaire de notre projet. La mission qui nous a été confiée fût de récupérer le matériel défaillant de l’ESAT et de concevoir un système permettant à un travailleur malvoyant de pouvoir distinguer un poids affiché par une balance avec une taille de police adaptée.
Ce projet n’était pas clairement défini avant notre visite à l’ESAT. Nous avions une idée générale de ce que nous devrions faire mais la rencontre de nos clients nous a donné des détails dont nous ne disposions pas.
Nous savions tous les trois que nous allions travailler pour des personnes en situation de handicap. L’idée de pouvoir nous rendre utiles nous a emballés et nous avons été très motivés et engagés dans ce projet, surtout après avoir pu discuter avec Anne et Sophie. Ce sujet nous a également attiré car nous connaissons des personnes aillant des troubles de la vision importants, donc cela nous touchait directement.
Nous avons récupéré plusieurs appareils à l’ESAT, à savoir :
- Un bol vibrant
- Un régulateur
- La balance



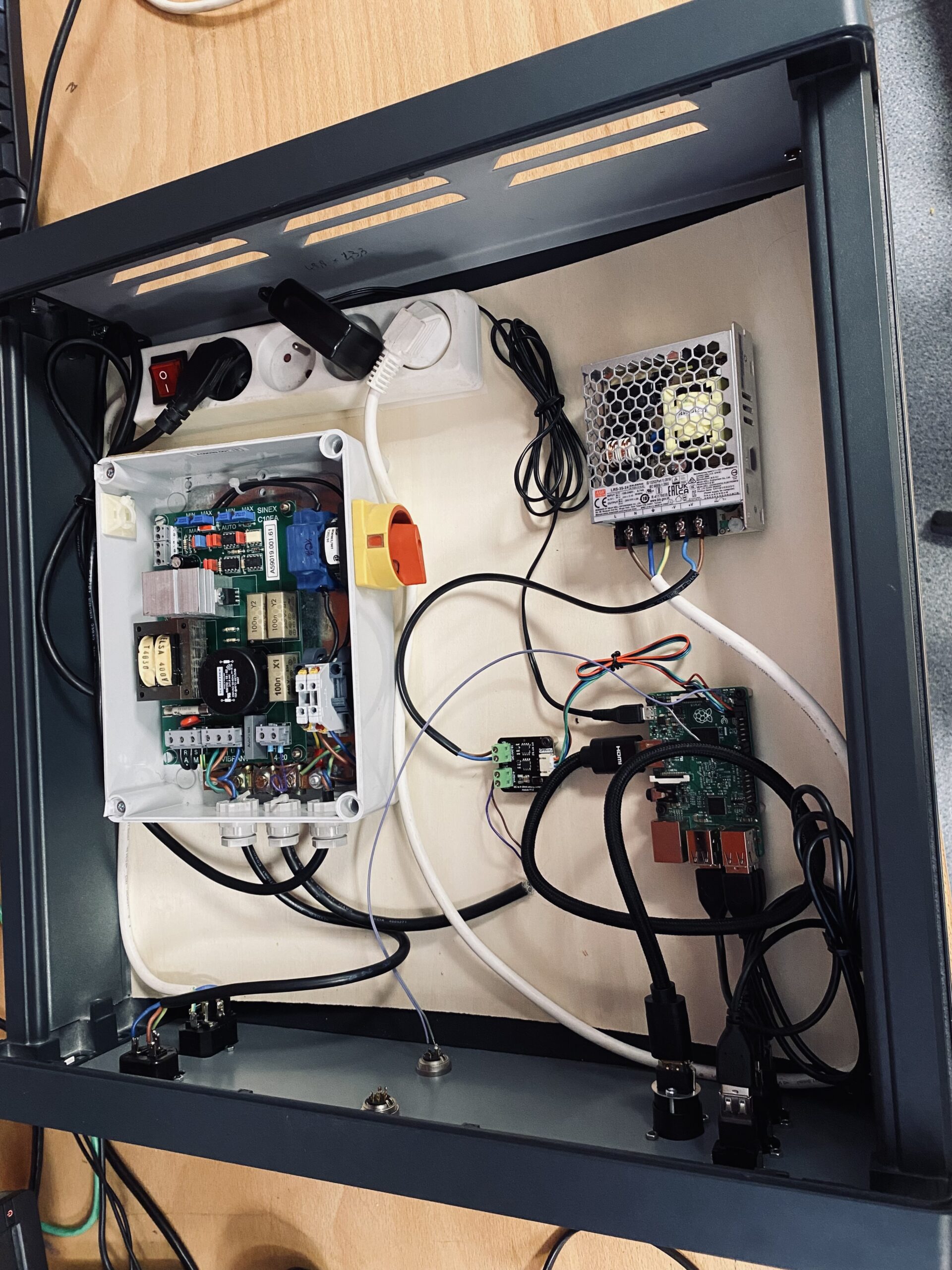
La Raspberry est un petit ordinateur qui consomme très peu d’énergie. Il nous a été utile pour transmettre et recevoir des données, celles de la balance par exemple. Il fonctionne avec le processeur Raspbian.
Pour le bol vibrant, le défi était de d’abord de le faire vibrer (logique), avant d’en réguler la force. Le problème venait également du régulateur qui ne régulait pas (logique aussi). Il a fallu étudier de fond en comble ces deux systèmes en demandant la datasheet au fournisseur, à savoir Sinex. Notre projet a vraiment été centré sur l’étude au cas par cas de nos problèmes car d’autres se créaient à leur résolution.
Au final nous avons réussi à faire vibrer notre bol vibrant et à faire réguler notre régulateur en mode manuel. Le but était cependant d’automatiser le système car l’ancien automate de l’ESAT ne fonctionnait plus. Il fallait, avant cela récupérer les données de la balance pour programmer, plus tard l’automatisation de notre bol vibrant, qui passe par le mode automatique du régulateur.
Après nos longues recherches nous avons découvert qu’une solution très simple existait pour récupérer le signal de la balance qui est du RS232. Le fait est qu’il existe un convertisseur de RS232 à USB. Nous avons donc utilisé cela et avons récupéré toutes les données de la balance après avoir peaufiné notre programme Python. Nous avons donc enfin réussi à récupérer, environ 2 fois par seconde, le poids en direct affiché sur la balance, sur notre mini-ordinateur.
Les heures de travail sur le code informatique se sont multipliées :
- Tout d’abord nous avons dû apprendre à utiliser TKinter , qui est utile pour l’affichage et la présentation visuelle de l’application. Le Tkinter nous a permis de mettre en place deux applications. Une première qui affiche, sur un écran d’environ 18 pouces, le poids, instantanément, sur la balance et un deuxième qui demande un poids de consigne.
- En même temps nous devions développer le programme principal. Ce dernier regroupe tout le traitement des données de la balance. Il nous permet de diriger l’intensité des vibrations de notre bol vibrant en fonction du poids sur la balance, plus l’on approche du poids de consigne (demandé au préalable) et moins les vibrations sont intenses, pour optimiser la précision de la pesée

Une fois que les applications ont été opérationnelles, il a enfin fallu mettre en boîte tout notre matériel, souder les composants, solidariser les appareils à la boîte et gérer la position des câbles de manière à ce qu’ils ne soient pas encombrants.

Conclusion
Nous sommes tous très fiers du travail que nous avons réalisé. En effet lors de ce projet, nous nous sommes très bien entendus que ce soit entre chaque membre du groupe mais aussi entre les tuteurs. Nous avons réussi à bien répartir les tâches entre chaque membre du groupe en fonction des qualités de chacun. De plus, nous avons réussi à rendre un produit final qui est esthétique, et simple à utiliser. Il respecte bien le cahier des charges que Mr.Lemoal nous avais fixé au début du projet. Ce projet nous a fait apprendre beaucoup de choses et nous a fait acquérir de expérience dans plusieurs domaines.
Merci de nous avoir lu
Jean PICARD
Dorian HODE
Louis BITEAU