
Introduction :
Bonjour à tous, nous sommes Tony Barbier, Jean Nobel et Errol Sistach, tous trois étudiants en deuxième année à Polytech Angers.
Dans le cadre de notre formation, nous sommes amenés à réaliser un projet. Le notre était la conception d’une voiture radiocommandée dont la particularité est la rotation de ses roues sur 180°.
Nous avons choisi ce projet car il est complet, il nous a permis de toucher à plusieurs domaines différents : la CAO, la mécanique, la programmation et l’électronique.
Les différentes étapes de notre projet ont été la modélisation, la programmation et finalement l’usinage de notre voiture.
Travail réalisé :
Présentation de la modélisation :
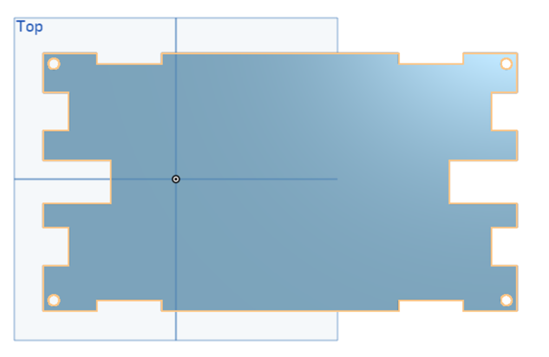
Tout d’abord le châssis. Sur les parties gauches et droites, l’enlèvement de matière sur l’axe horizontal est fait pour laisser passer les servomoteurs. Les deux renfoncements moins profonds sont prévus pour les boulons de serrage lorsque les roues seront soit à 90° à droite soit 90° à gauche.
Les trous sur les parties haute et basse sont faits pour laisser passer les roues quand elles seront complètement tournées.
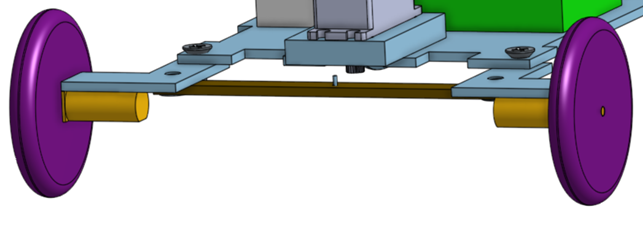
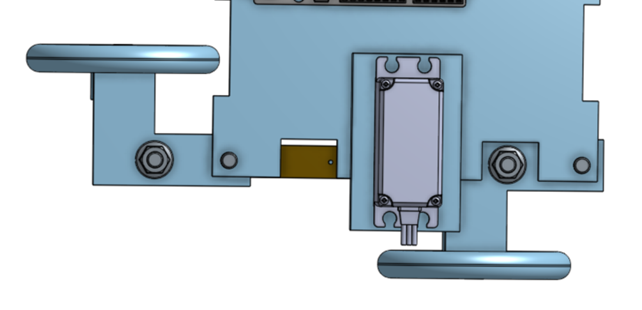
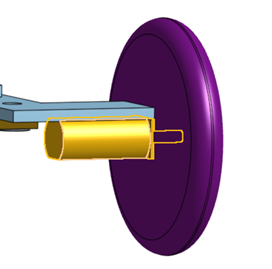
Voici l’essieu avant. Les deux essieux sont sensiblement identiques, la seule différence est qu’il n’y a pas de motoréducteurs (en jaune) à l’arrière.
Chaque essieu est composé d’une barre et de deux équerres. Pour pouvoir tourner, le palonnier (l’hélice) du servomoteur est relié à la barre, les essieux seront alors dirigés à gauche ou à droite selon la direction où l’on veut aller.

Pour finir cette partie, les roues arrières seront maintenues grâce à des carrés de fixation. Pour les roues avant, les motoréducteurs servent aussi d’arbres. 
Réception et test des composants :



Après avoir réceptionné ces composants, nous avons branché les servomoteurs et les motoréducteurs à la carte Arduino, et nous avons tout alimenté avec une batterie pour vérifier leur bon état de fonctionnement.
Programmation :
Grâce aux bibliothèques AFMotor, Servo et SoftwareSerial il a été très facile de créer un programme pour piloter les moteurs. Il suffisait d’indiquer les pins sur lesquels les moteurs étaient fixés puis d’utiliser les fonctions incluses dans les bibliothèques pour les mettre en mouvement.
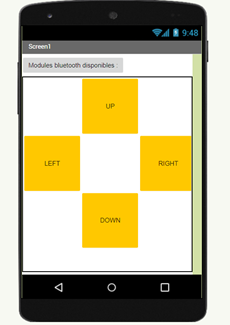
Grâce au site Mit App Inventor nous avons créé une application Bluetooth Android qui communique avec le module Bluetooth HC-06 et donc pilote la voiture. L’application est constituée d’une interface utilisateur pour se connecter au module Bluetooth puis faire avancer/reculer et tourner la voiture. La partie programmation est intuitive et se fait à l’aide de blocs. Lorsque l’utilisateur appuie sur un bouton, l’application envoie un ordre (par exemple « l » en ASCII pour « left ») et le module Bluetooth récupère cet ordre pour le transmettre à la voiture.
Mais la façon la plus simple de piloter la voiture reste celle sur ordinateur en utilisant le port USB de l’Arduino. Nous avons donc utilisé l’IDE Processing pour développer un programme permettant à l’utilisateur de communiquer avec la carte par l’intermédiaire d’un port USB.
Usinage :
Notre voiture est faite à partir d’une plaque en bois de 5mm d’épaisseur. Nous avons utilisé la fraiseuse du Fablab de Polytech Angers pour usiner chacune des pièces nécessaires à la réalisation de la voiture.
Nous avons ensuite montés les pièces entres elles : 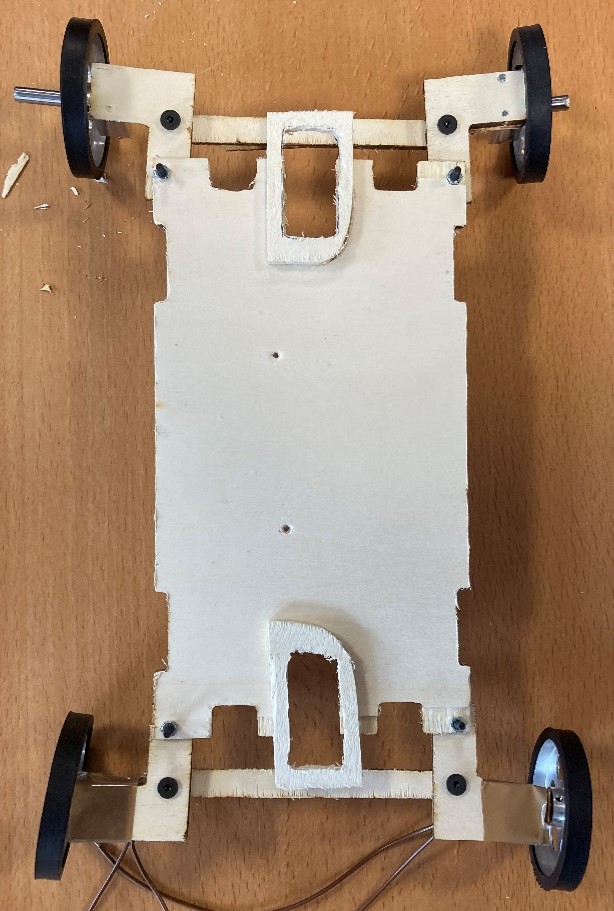
Puis nous avons soudé des fils électriques entre les motoréducteurs et la carte Arduino. Et pour finir, nous avons relié le palonnier de chaque servomoteur aux essieux respectifs.
Conclusion :
Ce projet nous aura été très formateur. C’était vraiment intéressant de se tourner vers quelque chose de plus concret.
C’est toujours une bonne expérience de travailler en équipe, d’autant plus lorsque c’est un projet comme cela.
Malheureusement, notre voiture était loin d’être parfaite mais nous sommes quand même fier du travail fourni et du résultat.
Merci à M. Verron pour toute son aide.
Tony Barbier, Jean Nobel, Errol Sistach.