
Nous sommes 3 élèves, Ronan GOMOND, Vivien JOLY et Mathis LEGARDINIER, en deuxième et dernière année du cycle préparatoire de Polytech Angers. Dans le cadre de la fin de notre deuxième année nous avons réalisé un projet d’une durée totale de 80H et qui avait pour but la réalisation d’un moteur brushless.
Le moteur brushless est un moteur électrique, pour comprendre le terme de brushless il nous faut regarder le fonctionnement d’un moteur à courant continu classique :
C’est le même principe pour n’importe quel moteur électrique. Une bobine traversée par un courant va créer un flux magnétique et si on inverse le sens du courant alors le flux sera inversé. Ainsi on peut attirer un aimant (par définition sensible aux champs magnétiques) et ensuite le repousser si on inverse le sens du courant dans la bobine. Les moteurs se différencient sur leur manière d’inverser le courant dans les bobines. Le moteur à courant continu utilise des balais qui par contact avec le rotor va inverser le sens du courant en fonction de la position du rotor :

Fonctionnement d’un moteur à courant continu
image tirée de la page Wikipédia allemande du moteur à courant continu, les balais sont représentés en orange.
Le moteur brushless, lui, n’a pas de balais cela lui permet d’être silencieux et d’avoir moins de frottements. En réalité l’inversion du courant est faite par électronique.
Notre premier moteur était constitué de 3 bobines (cuivre émaillé) au stator et 2 aimants permanents (néodyme-fer) au rotor. Il a été réalisé à l’imprimante 3D de l’atelier de l’école.
La programmation s’est faite en Arduino et était simplement l’inversion du sens du courant dans des bobines précises et à des instants précis.
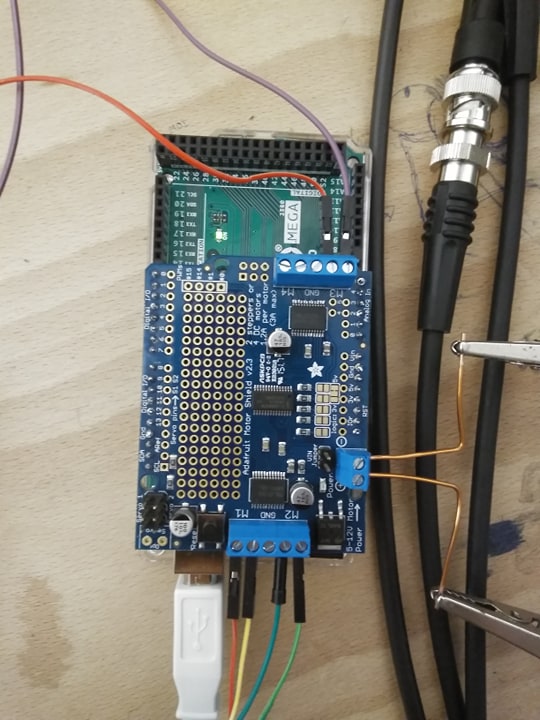
Carte Arduino pour le fonctionnement du moteur avec le shield d’alimentation des bobines Adafruit Motorshield v2.3
Le programme peut se résumer au chronogramme suivant :

Ici on a 12 étapes pour une rotation complète du rotor, BX représente la bobine n°X
– L’action verte est “allumer la bobine dans un sens”
– L’action rouge est “allumer la bobine dans le sens opposé du vert”
– L’action grise est “éteindre la bobine”
On remarque que le chronogramme est le même pour chaque bobine mais décalé d’un tiers de rotation, ce qui est l’angle entre chaque bobine.
Nous avons eu le résultat suivant :
Rotation à 100 tour/min
Moyennement satisfaits nous avons réalisé une deuxième version en doublant les proportions, à savoir 6 bobines et 4 aimants. Tout en utilisant une imprimante 3D nous avons obtenu le moteur suivant, avec le même programme et le même chronogramme au seul détail qu’il représente qu’une demi-rotation. En multipliant les bobines/aimants par deux on a besoin de multiplier également par deux la durée du chronogramme. Les bobines étaient en série deux à deux, donc on avait bien 3 bobines d’un point de vue électrique.
Rotation à 500 tour/min
Ce deuxième résultat est bien plus satisfaisant. Néanmoins le fait d’utiliser du plastique pour le corps ne permet pas d’atteindre de grosses puissances car les bobines chauffent très vite avec l’effet Joule. Nous avons également pu identifier des pertes magnétiques, par exemple en mettant un noyau en fer dans la bobine nous aurions pu avoir un champ un peu plus fort.
Ce travail nous a permis d’utiliser nos connaissances en électromagnétisme, électricité et électronique. Nous avons également beaucoup appris sur les moteurs électriques.
L’autonomie qui nous a été donnée nous a stimulé sur l’impression que ce projet était vraiment le notre et que c’était à nous de le mener à bien.
Nous tenons à remercier Polytech Angers et plus particulièrement Monsieur AUTRIQUE, Madame GÉRARD, Monsieur MERCIER pour nous avoir aidé et avoir répondu à nos questions.
Merci à vous également pour avoir lu ce résumé !