

Nous, Nicolas Brosseau et Malo Gicquel, avons pour projet conception la création d’un robot Diwheel de type EDWARD pour le semestre 4 de notre classe préparatoire à l’ISTIA. Cependant, pour le moment nous devons en faire une version LEGO® afin de connaître les prémisses de cette conception. Ce projet a été proposé et accompagné par monsieur Nizar Chatti enseignant-chercheur à l’ISTIA.
Quelles ont été les différentes étapes du projet ?
1- La conception mécanique
La première étape consistait en créer la base sur laquelle nous devions travailler. Nous avons recherché si des modèles existent (ce qui est le cas) mais aucun ne correspondent entièrement à notre projet. A la demande de Mr Chatti les roues à la base devaient être en tuyau d’aspirateur car les roues disponibles dans les caisses LEGO® de l’ISTIA ne comportent pas de roues aussi grandes (environ 20 cm de diamètre). Après plusieurs prototypes , celui-ci était le plus stable, solide ainsi que le plus adapté aux roues.
Je dis adapté aux roues car pour ce projet nous avons dû imprimer nos roues . En effet les roues qui leur ressemblent ne se vendent pas au détail en France (ou à un certain prix!). Ces roues ont été imprimé par Mr Verron et Mr Saintis sur l’imprimante 3D de l’ISTIA. Le premier résultat ( à gauche ) fut bien plus concluant que le second ( à droite ) car la précision entre les deux imprimantes est grande. Nous avons donc imprimé une seconde roue identique à la première bien qu’elles sont assez onéreuses (presque 100€ par roue de bonne qualité)


2-La régulation
Comme vous pouvez vous en douter, à chaque accélération ou décélération des moteurs, le corps du robot va subir des balancements. On peut alors dire que le système est instable. L’idée de cette partie du projet est alors de faire disparaître ces balancements le plus possible.
Pour cela, nous allons utiliser nos cours d’automatique afin de réguler ce système. La première étape consiste alors à modéliser le système mathématiquement, ce qui nous permettra par la suite de l’étudier. Le système étant plutôt complexe, je vous laisse imaginer les équations allant avec!
Dans un second temps, grâce aux logiciels Scilab et Matlab, nous pouvons établir une commande par retour d’état qui permettra de réguler ce système. Voici le schéma-bloc de notre système régulé :

Schéma bloc sous Matlab-Simulink
Après avoir calculé les valeurs relatives à la régulation du système, nous avons pu faire des simulations du système sous Scilab.
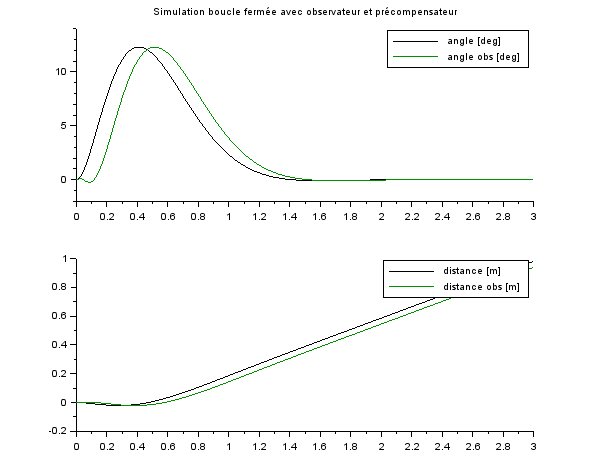
Simulation sous Scilab 6.0.0 (e=9V)
Nous pouvons remarquer sur le premier graphique (celui de l’angle de balancement) que le système se balance d’environ 15° avant de se stabiliser et avancer d’une manière linéaire (voir graphe 2)
La régulation étant un succès, il ne reste qu’à implémenter cette loi de commande sur le robot.
3- La commande
Monsieur Chatti nous à proposé de commander le robot à l’aide d’une Wiimote (Manette de Wii) et de MatLab Simulink. Nous avons donc pour cela utilisé les logiciels Bluesoleil , Monobrick et Glovepie qui sont tous trois gratuits.
Le premier , Bluesoleil , permet la mise en relation de la Wiimote et de l’ordinateur en bluetooth®.

Ceci fait Glovepie nous a permis de rendre la Wiimote équivalente au clavier. C’est à dire que pour l’ordinateur , la wiimote est comme une personne qui écrit. La wiimote en avant écrit W, sur le coté droit D etc… Le programme nous a permis ainsi de commander Avant , Arrière , Tourner Droite/Gauche et leur combinaisons (Avancer et tourner en même temps). De plus , les boutons – et + diminue ou augmente la vitesse de rotation des roues afin de tourner plus vite ou avancer plus vite.

Pour finir le dernier programme Monobrick lui ,fait la communication avec la brique NXT( à gauche) qui est le “cerveau” du robot , là où sont stockées les données , programmes etc… Cette communication se fait également par bluetooth® avec Bluesoleil.


Malheureusement nous n’avons pas réussi à finaliser le projet, la commande n’étant pas fonctionnelle avec la wiimote. Cependant un programme simple peut toujours être implémenté dans la brique NXT pour faire avancer le diwheel.
Nos remerciements vont particulièrement vers monsieur Chatti pour nous avoir encadré et également à messieurs Saintis et Verrron pour l’impression de nos roues.
Brosseau Nicolas et Malo Gicquel