
Bonjour à tous !
Nous sommes 3 étudiants en deuxième année de cycle préparatoire à Polytech Angers. Lors du 4e semestre, nous avions 100h pour réaliser un projet. Nous avons tous les trois choisi de travailler sur le projet d’automate mécanique. L’animal que nous avons choisi d’animer est un panda. Dans cet article, nous vous présentons les objectifs du projet et ce que nous avons fait pour les atteindre !
Bonne lecture !
1 – L’objectif de ce projet
Ce projet a pour objectif de nous faire concevoir un automate mécanique en s’inspirant de la méthode que les studios Disney utilisaient.
Disney utilisait des automates motorisés lors de la création de leurs films d'animation. Ces automates leur servaient de base à la création d'un mouvement à animer.
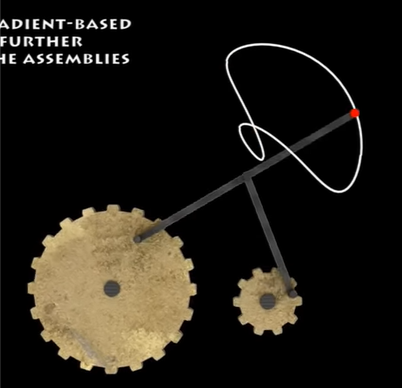
La méthode de Disney consiste à utiliser des roues dentées et des bielles, liées les unes aux autres avec un système d’engrenages. De cette manière, la mise en rotation d’une roue dentée engendre le mouvement complet de l’automate.
2 – Prototype
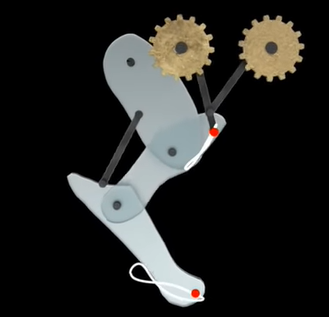
Nous avons tout d’abord conçu une seule patte, pour être sûr d’avoir quelque chose de propre et de fini à la fin du projet. Cela nous a bien aidé à prendre en main le logiciel de CAO et à modéliser, pas à pas, le mouvement d’une patte arrière de panda. Nous avons fait beaucoup de recherches sur l’anatomie du panda et sur sa façon de se déplacer avant de commencer le design des pattes.
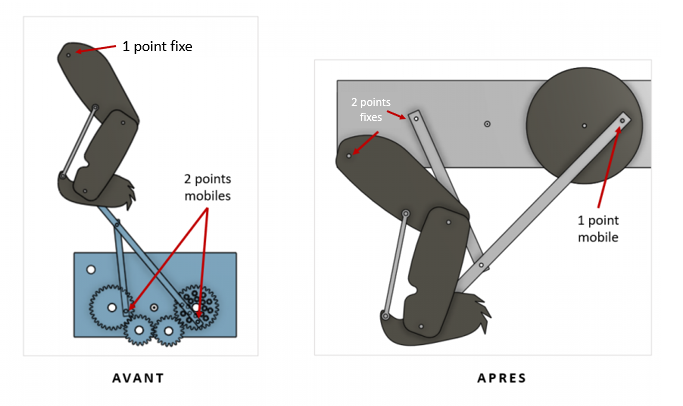
Nos premiers essais en CAO n'étaient pas très concluants. Nous utilisions, comme Disney, deux engrenages pour une seule patte. Il fallait donc prendre en compte beaucoup de variables. Pour simplifier notre travail, nous avons fait le choix de n'utiliser qu'une seule roue. Le mouvement est donc déclenché à partir d'un seul point, au lieu de deux.
Une fois la CAO de notre prototype vérifiée par notre professeur, nous avons imprimé les différentes pièces grâce aux imprimantes 3D du fablab. La roue est munie d’une manivelle pour permettre le mouvement.
3 – Corps entier : la CAO
Nous sommes ensuite passé à la CAO du corps entier.
Nous avons procédé comme suit :
- Conception d’un bâti qui servira de corps au panda
- Conception des pattes avant
- Réflexion sur la manière de transmettre le mouvement des pattes arrière aux pattes avant (une seule roue/train d’engrenage)
- Modélisation du mouvement des pattes avant
- Conception des arbres constituant le train d’engrenage
- Conception d’une tête en CAO qui servira de référence pour la fabrication de la tête
- Modélisation du mouvement de la tête et ajout d’un arbre supplémentaire sur le corps du panda pour ajouter la tête mobile à l’assemble (la bielle de la tête est liée au corps par une ficelle qui est attachée à une roue)
C’est ce genre de système avec une ficelle que nous avons utilisé pour la tête. Pour le premier test, nous avions mis une bielle, cela ne fonctionnait pas bien.
Nous avions déjà une petite expérience sur la modélisation de mouvement de patte grâce à notre prototype, alors il n'a pas été compliqué de créer le mouvement des pattes avant. Nous avons choisi de transmettre le mouvement avec un train d'engrenage pour que les pattes arrière et avant n'aient pas le même mouvement, afin que ce dernier soit plus proche de la réalité.
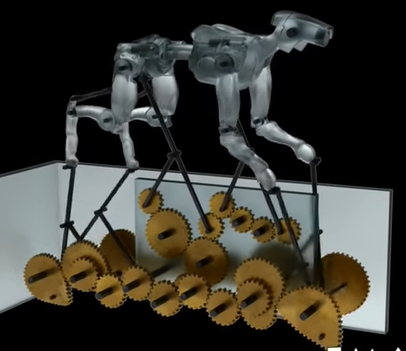
Finalement, voici la version finale ET animée de notre panda en CAO :
4 – Corps entier : le montage
Nous avons donc imprimé toutes les pièces nécessaires :
- 9 roues
- 13 bielles (3 par pattes + 1 pour la tête)
- 4 pattes (toutes constituées de 3 parties à assembler)
Il a aussi fallu créer le corps du panda grâce à des planches de bois. Nous avons utilisé la Charly Robot pour que nos perçages soient bien précis. Nous avons ensuite fabriqué la tête du panda avec les moyens du bord (polystyrène et figurine en papier mâché).

Atelier peinture au fablab !
Une fois toutes les pièces du panda prêtes, nous sommes passés à l’assemblage. Nous avons utilisé des tiges filetées et des écrous freins pour nos arbres. Cela n’a pas été de tout repos, mais finalement, nous avons réussi à obtenir un produit fini !
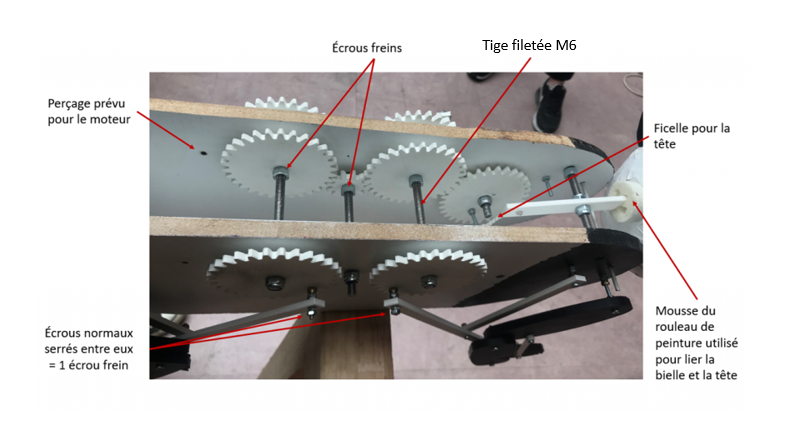
Nous voulions mettre un petit moteur sur notre panda, mais nous n'avions pas commandé de moteur adapté et celui que nous possédions n'était pas assez puissant, le couple était trop faible. Nous nous en sommes rendu compte trop tard, alors nous n'avons pas eu le temps de fabriquer une manivelle. Il faut faire bouger les roues intérieures directement à la main pour observer le mouvement complet.
Voici un aperçu du panda tout assemblé en mouvement :
Comme vous le voyez, le mouvement n’est pas très fluide parce que nous n’avons pas de moteur. Avec, le mouvement devrait être bien plus fluide. Nous avons réduit au maximum les frottements des bielles les unes avec les autres en créant des décalages là où ils étaient nécessaires, mais il aurait aussi fallu trouver une solution pour les frottements entre le corps et les arbres.
5 – Ce que nous retenons de cette aventure
Même si notre panda n’est pas parfait, nous sommes fiers d’avoir pu terminer à temps le montage. Nous sommes aussi satisfaits de voir qu’il fonctionne.
Ce projet nous a permis d’apprendre beaucoup de choses en mécanique et d’améliorer notre utilisation des outils informatiques à notre disposition. C’était aussi très intéressant de travailler en groupe tout au long de ce projet car les échanges ont été riches !
Nous espérons que notre article vous a permis de comprendre les étapes de création de notre panda ! Merci pour la lecture !
Laetitia Baudard/Thomas Voclin/Sixtine Brun