
Bâti

Lanceur de ficelle
Bonjour,
Nous sommes 2 étudiants de 2ème année du cycle préparatoire de Polytech Angers. Lors de notre 4ème semestre, nous avons eu la chance de travailler sur le projet ” lanceur de ficelle”.
Un lanceur de ficelle, c’est quoi ?
C’est tout simple ! Un lanceur de ficelle est un système constitué de 2 roues qui propulsent un fil continuellement.Voici une vidéo pour mieux comprendre le principe: https://www.youtube.com/watch?v=rffAjZPmkuU
Les objectifs :
En partant du prototype déjà créé par le groupe précédent (voici son article : https://blog.univ-angers.fr/istiaprojetsei2/2018/06/20/projet-lanceur-de-ficelle/ ), nous devions créer des ondulations puis automatiser le système pour réaliser automatiquement des formes spécifiques.
Travail réalisé :
1) Prise en main
Dans un premier temps, nous avons pris en main le prototype réalisé l’année dernière puis nous avons remplacé le pack de pile qui alimentait les moteurs par un transformateur. Cela a permis d’avoir une source d’énergie plus stable.
2) Recherche de solutions
Nous avons commencé par chercher une solution pour créer des ondulations. Nous avons finalement retenue 3 solutions. Premièrement, utiliser un servomoteur pour diriger l’axe et ainsi créer des vagues :

Servomoteur de l’axe
Après plusieurs essais, nous avons conçu un bras en carton commandé par le servomoteur pour “taper” la ficelle et ainsi créer des vagues.

Bras en carton
Enfin, nous avons remarqué que sur le prototype précédent, le fil subissait beaucoup de frottements. C’est pourquoi nous avons conçu un guide pour l’envoyer entre les 2 roues et limiter le plus possible les frottements. Il a été conçu sous SolidWorks puis imprimer en 3D.
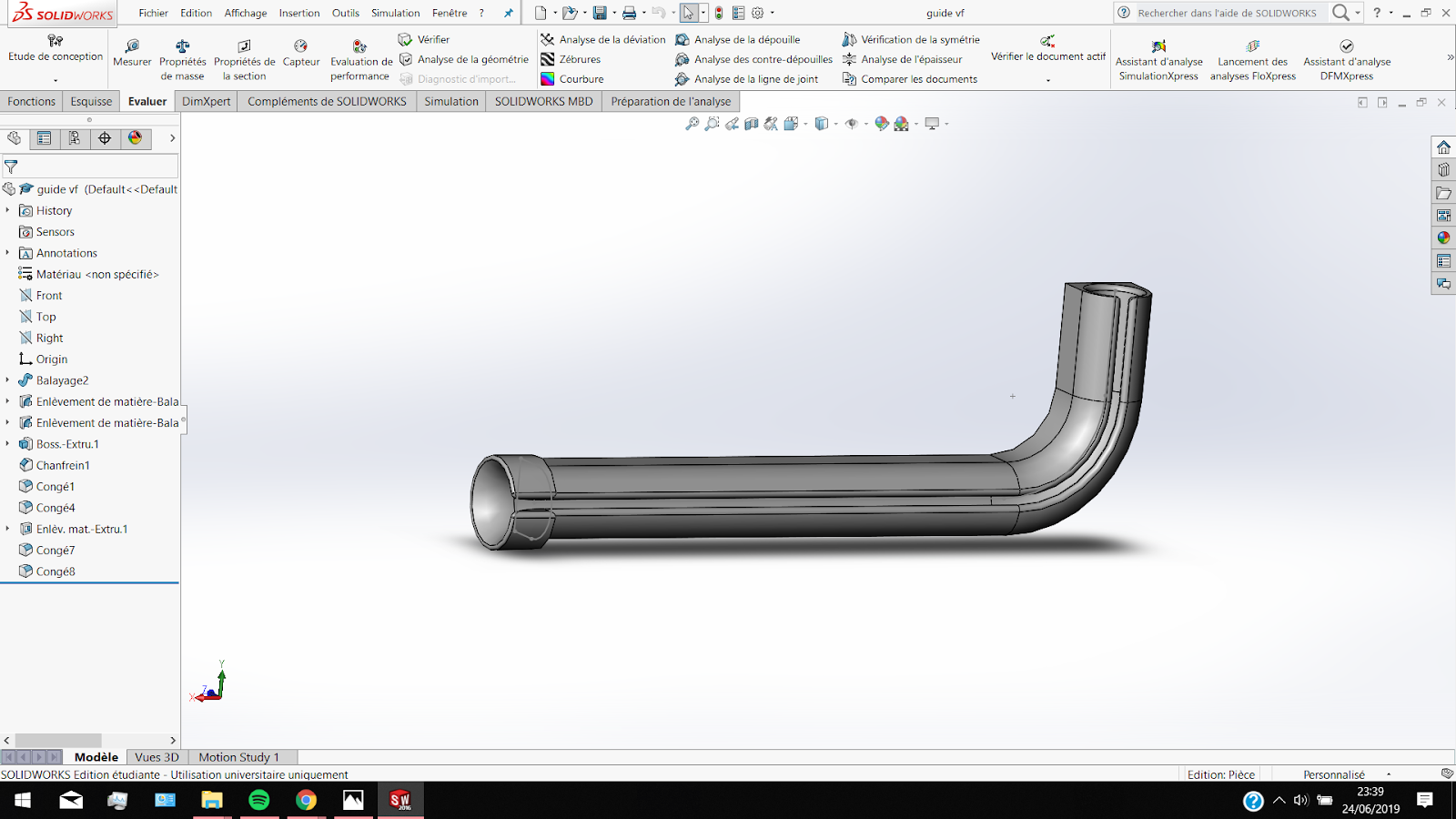
Guide conçu sous SolidWorks
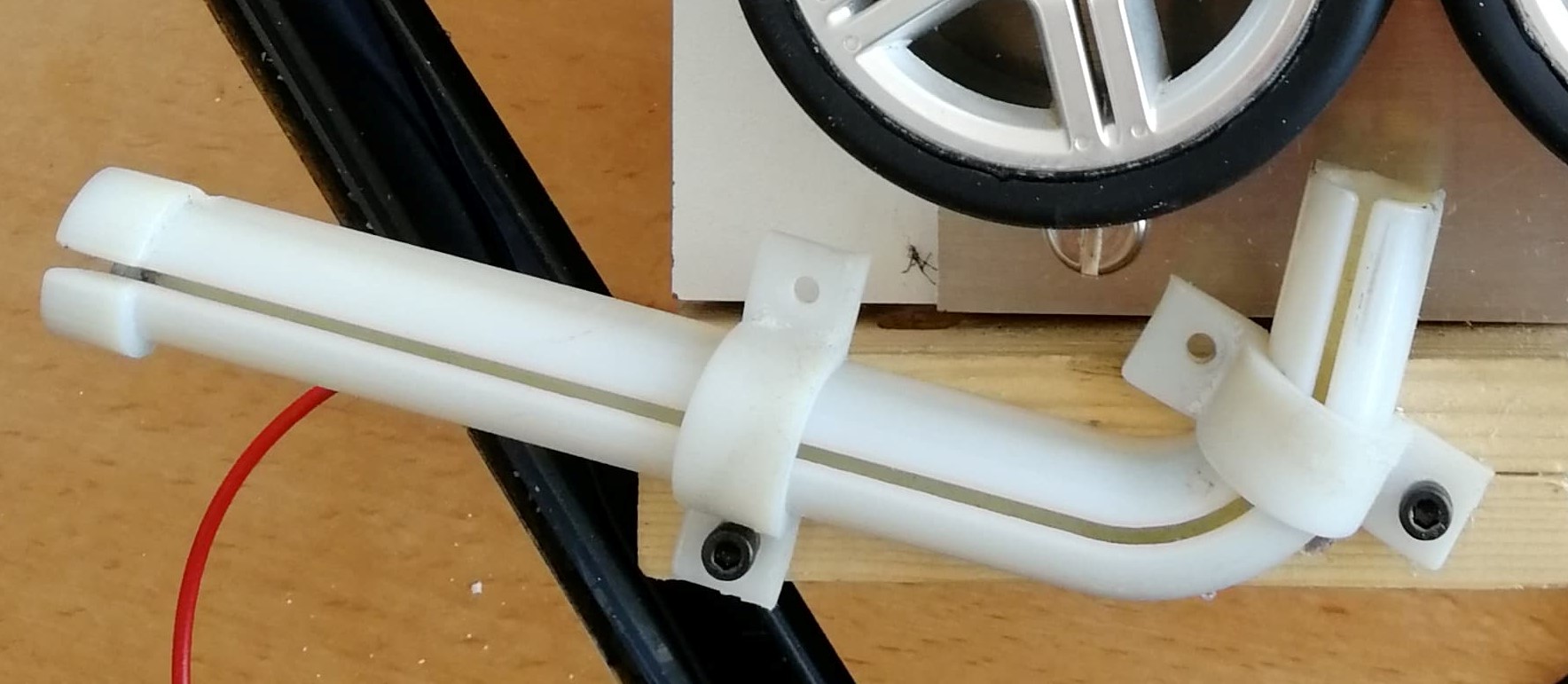
Guide monté sur le prototype
Voici la version finale du prototype :
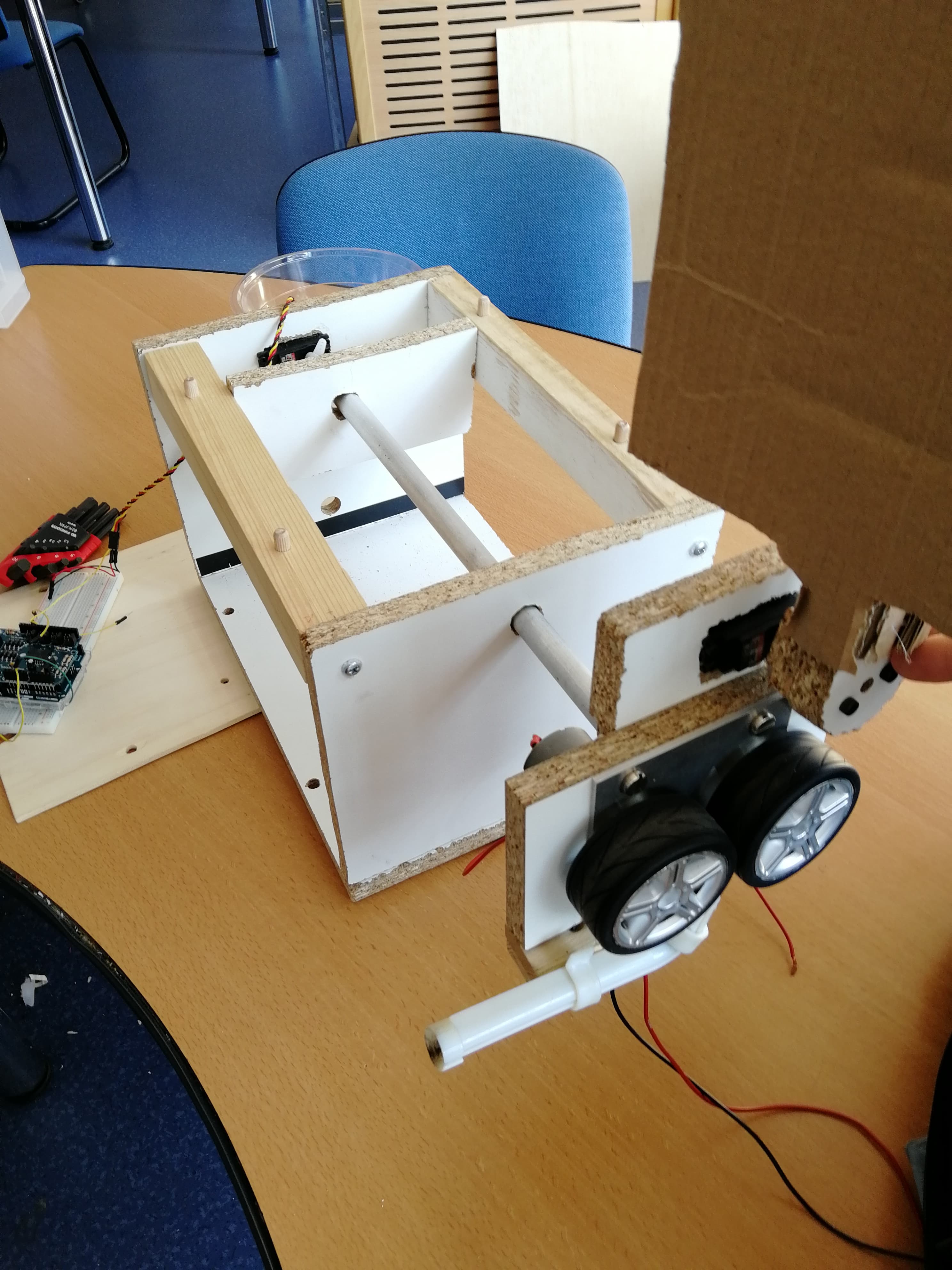
Prototype final
3) Automatisation
Puisque que notre prototype fonctionnait plutôt bien, nous avons débuté l’automatisation du système. L’automatisation c’est fait via une carte Arduino et un shield. Un Shield est une extension de l’Arduino qui permet d’alimenter nos 2 moteurs avec un courant suffisamment important. Puis nous avons écrit un programme commandant les 2 moteurs et les 2 servomoteurs simultanément pour obtenir des figures.
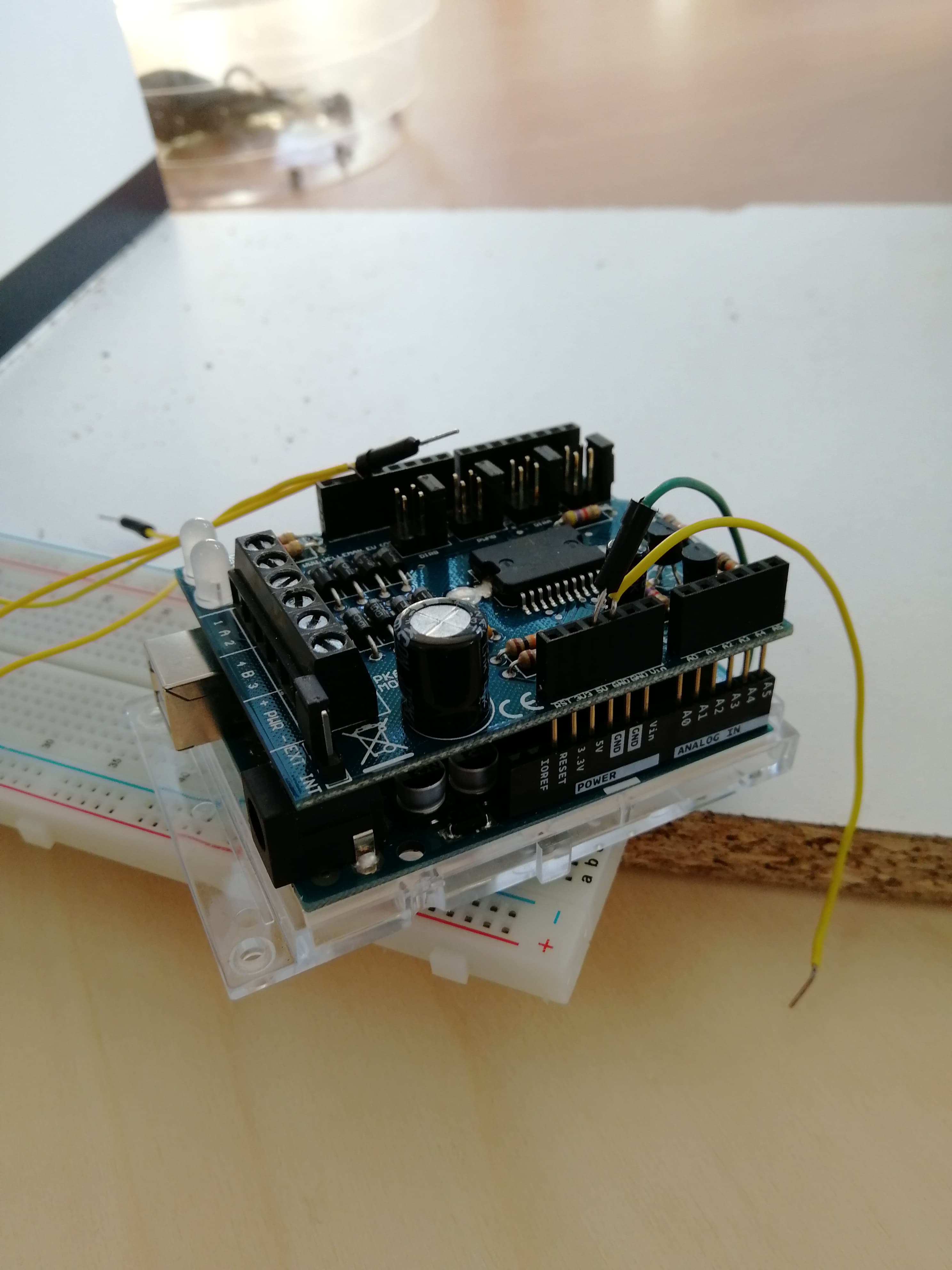
Carte Arduino et Shield
4) Conception de la version finale
Etant satisfait de notre prototype et de l’automatisation, nous avons poursuivit le projet par la conception de la version finale. Le but est de réduire la taille du lanceur et de le rendre plus stable. La solution retenue était de déplacer le centre de gravité du lanceur vers le centre du bâti. Nous avons donc conçu un bâti complètement démontable pour pouvoir l’imprimé pièce par pièce. Voici quelques exemples de fichier SolidWorks :
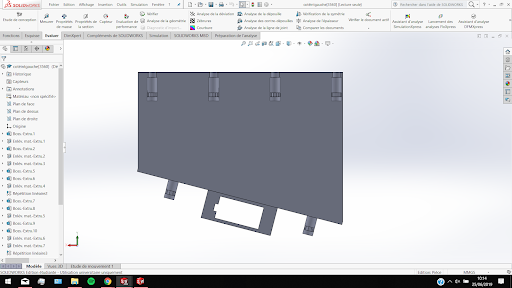
Côté gauche
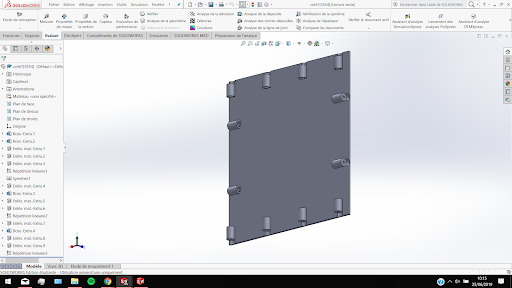
Bas
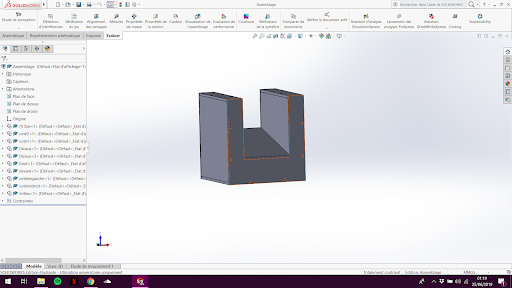
Bâti complet
Puis nous les avons imprimés via l’imprimante 3D disponible au Fablab. Voici le résultat avec seulement certaines pièces :
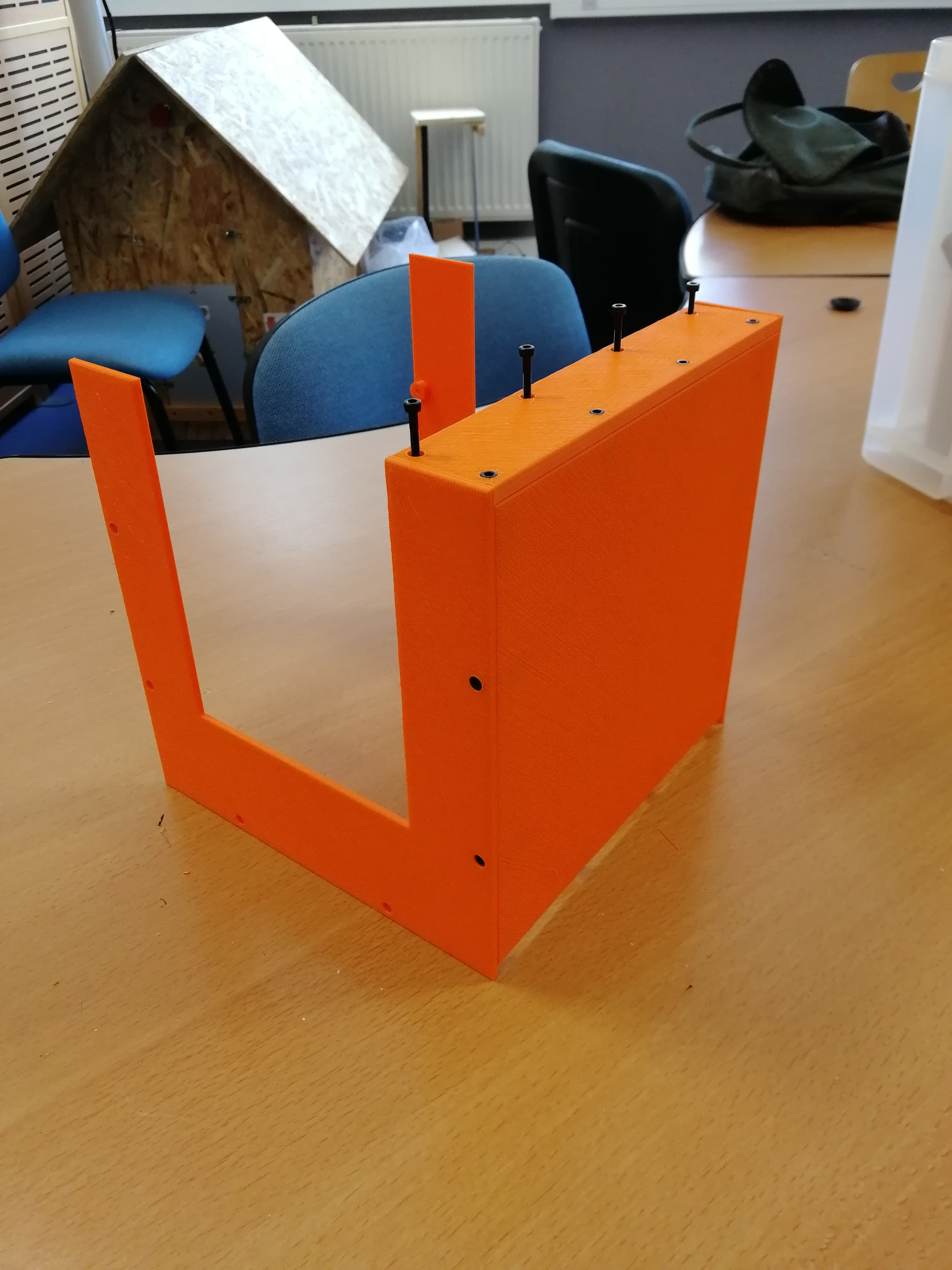
Bâti
Nous avons aussi imprimé le bras qui permet de “taper” le fil :
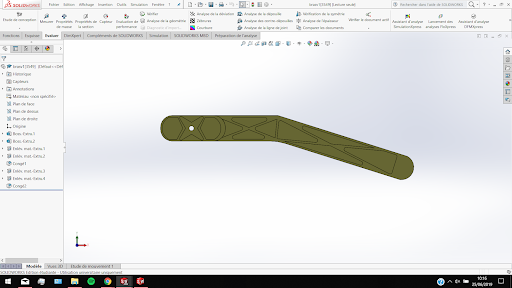
Bras sous SolidWorks

Bras imprimé
Afin de distribuer la rotation du servomoteur à l’axe, nous avons opté pour un système poulie-courroie . Nous avons commandé la courroie et conçu sous SolidWorks puis imprimer les poulies :
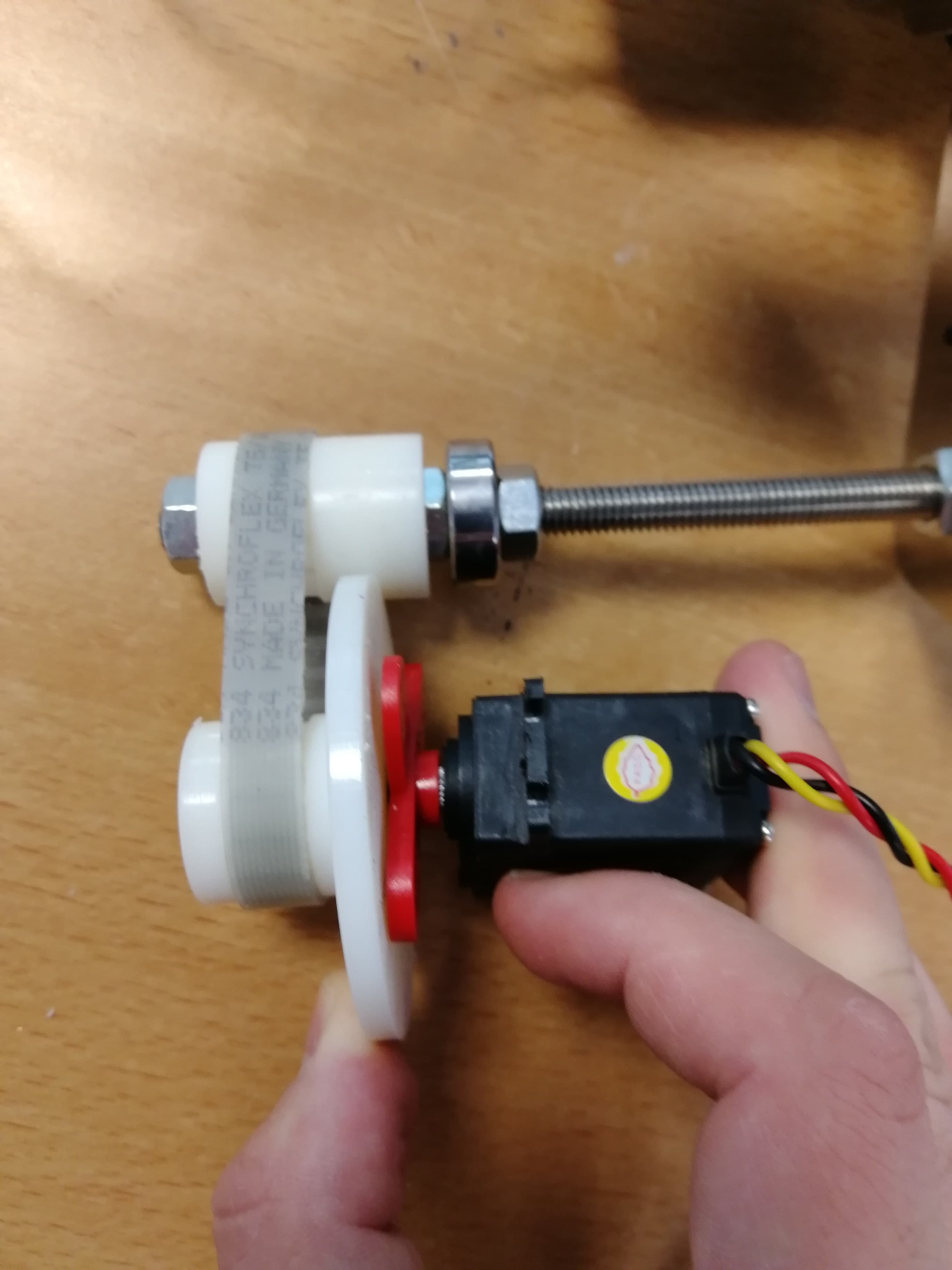
Système poulie-courroie
La plaque contenant les moteurs et le servomoteur du bras a aussi été conçue sous SolidWorks pour ensuite être usinée via un Charly Robot . C’est une commande numérique qui permet, à l’aide d’une fraise, de détourer une pièce.
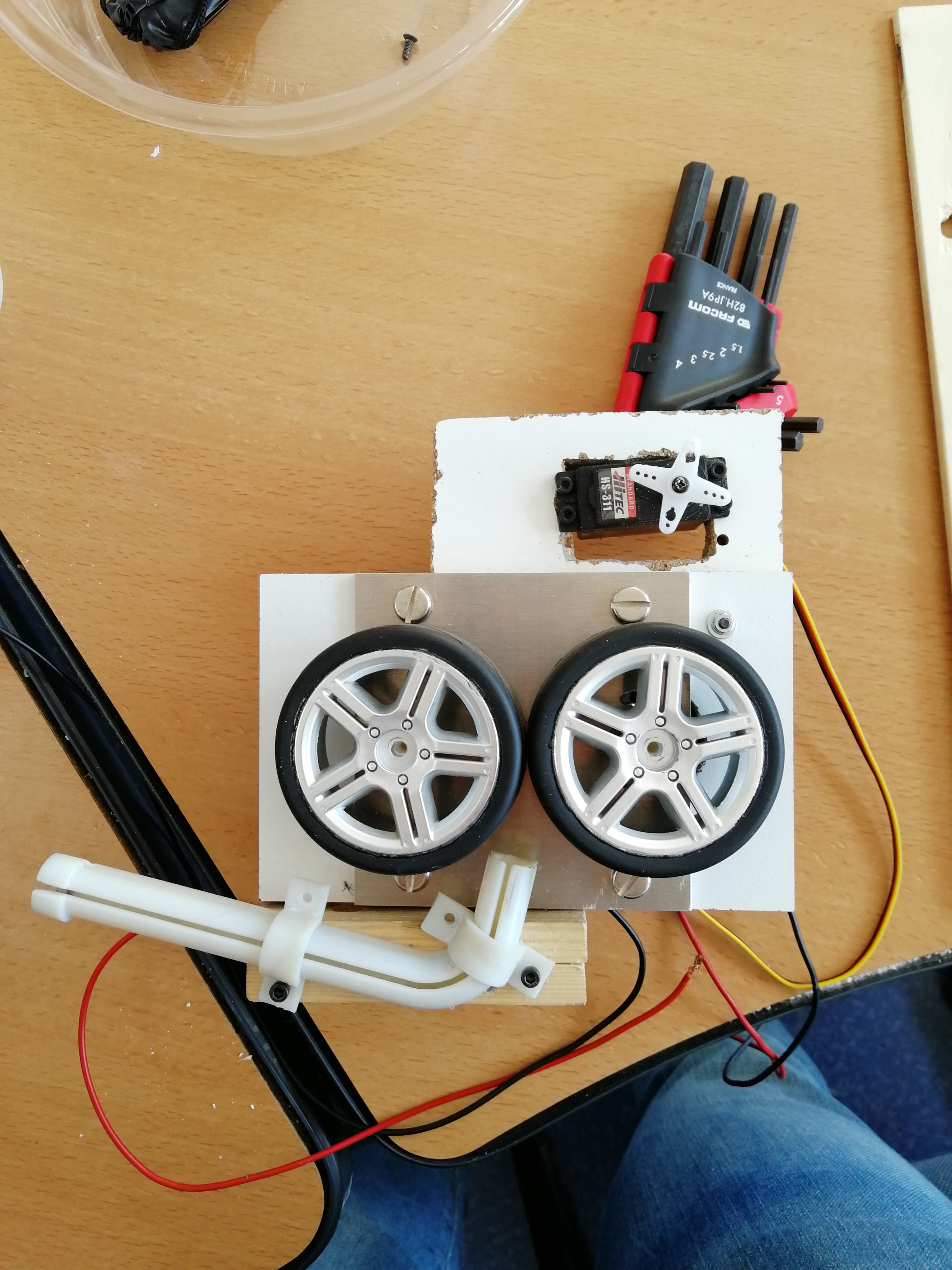
Version prototype

Version finale
Des roulements aux extrémités de l’axe ont été ajoutés pour assurer une rotation avec le moins de frottements possible.
Conclusion
Nous sommes fiers du résultat obtenu. La version prototype fonctionnait très bien. Cependant le passage à la version finale fut assez complexe et malheureusement nous n’avons pas pu terminer la version finale.