Dans les magasins, sur les stands, dans les fêtes foraines ou encore dans la conception de films d’animation, les automates animés sont présents.
Mais qu’est-ce vraiment ?
Voici la définition Wikipédia :
Wikipédia : Définition
D’après les informations récoltées, c’est un mécanisme qui, à l’aide d’un seul moteur, reproduit un mouvement naturel.
Dans les magasins, cela donne un coté plus vivant au stand et permet de vendre plus de jouets. Dans la fête foraine, on va attirer plus d’enfants sur l’attraction car si ça bouge, ça attire l’œil.
Pour ce qui est des films d’animation, l’utilisation est différente. Disney, par exemple, utilise les automates pour que les mouvements des personnages soient plus simples à modéliser.
En effet, on va alors créer le mouvement désiré et on augmentera ou baissera la vitesse en fonction de la scène ; tout devient plus simple.
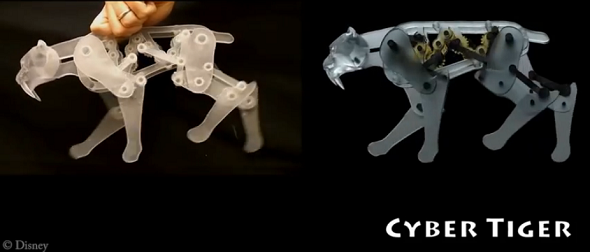
DisneyAutomate
Mais tout d’abord, présentons nous, nous sommes Léo Festoc, Jonas Guerniou et Thomas Gazon, 3 élèves en PEIP 2 A à Polytech Angers et aujourd’hui, nous allons vous présenter notre projet.
Les automates vous intéressent ? Voici notre démarche de conception :
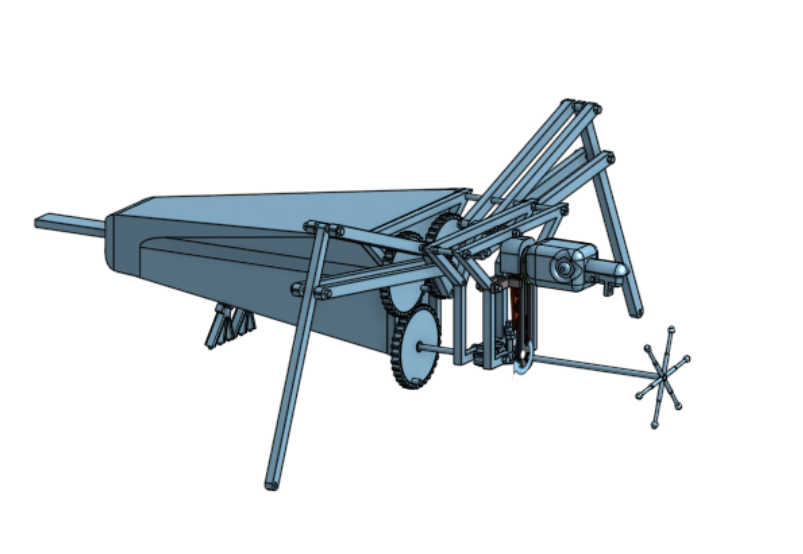
Nous nous sommes d’abord intéressés aux recherches du laboratoire Disney et nous avons modélisé notre propre automate : un chien.
Image chien
Pourquoi un chien ? Après avoir vu plusieurs automates Disney qui étaient pour beaucoup soit des félins, soit des chiens,
nous nous sommes dit qu’il serait plus judicieux de choisir quelque chose qui ressemble au mieux à ce qui a été le plus développé.
De plus, au départ, cela nous semblait plus simple.
Si vous avez un choix à faire, il faut bien y réfléchir car vous allez passer du temps dessus.
Après avoir fait ce choix d’automate, il faut passer à l’étape du choix des mouvements :
quels mouvements vous voulez, combien vous en voulez, etc… Si vous voulez plus de simplicité, basez-vous sur des automates que vous pouvez visualiser en vidéo.
Choix du Logiciel

Logo Solidworks
Après avoir choisi les mouvements, la réalisation en CAO peut débuter !
Il faut d’abord choisir le logiciel en fonction de vos ressources, vos budgets et votre matériel.
Notre choix s’est porté directement sur SolidWorks car nous avions des bases sur celui-ci, uniquement.
Choix du logiciel fait, faites chauffer la carte graphique et le processeur, la modélisation commence !
Modélisation
Les pattes
La première étape consiste à dessiner la partie qui sera en mouvement. Pour nous, il s’agit de l’une des pattes (nous avons commencer par l’arrière).
Par exemple, voici notre patte arrière en 4 parties comportant la patte inférieure, la cuisse, un milieu et une bielle de soutient pour le mouvement
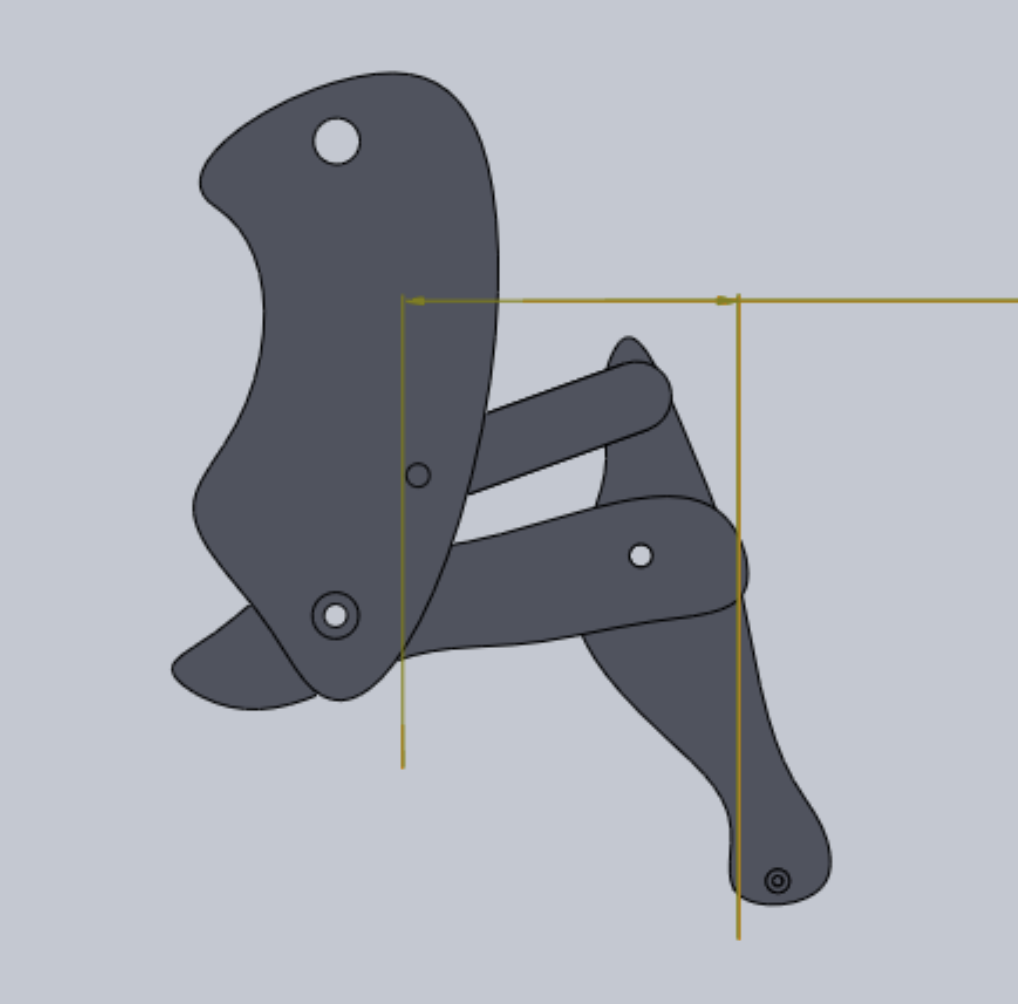
Patte arrière
Par la même occasion, nous avons modélisé la patte avant.
Ensuite, il faut quelque chose pour tenir tout cela : un corps.
Il suffit simplement de dessiner un corps et de créer un assemblage avec celui-ci.
Avec des extrusions préalablement faites, nous pouvons alors contraindre les pattes avec le corps et commencer à réfléchir à la trajectoire. Pour cela, nous observons le mouvement et dessinons une esquisse qui sera la trajectoire.
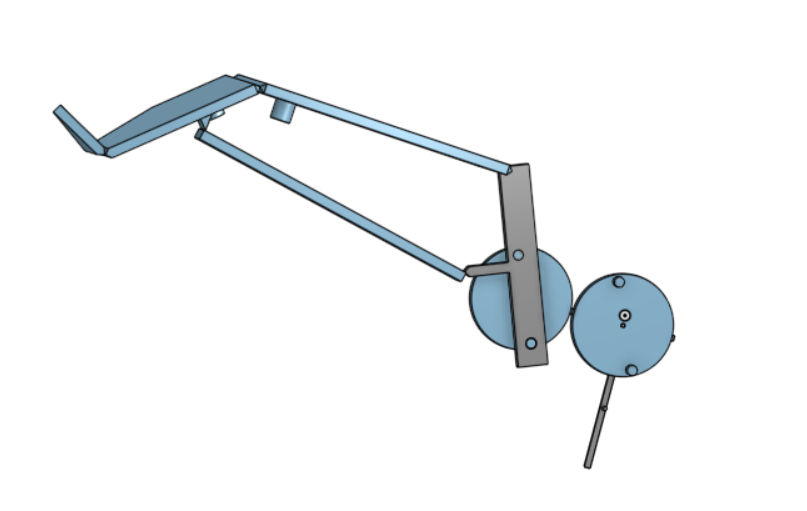
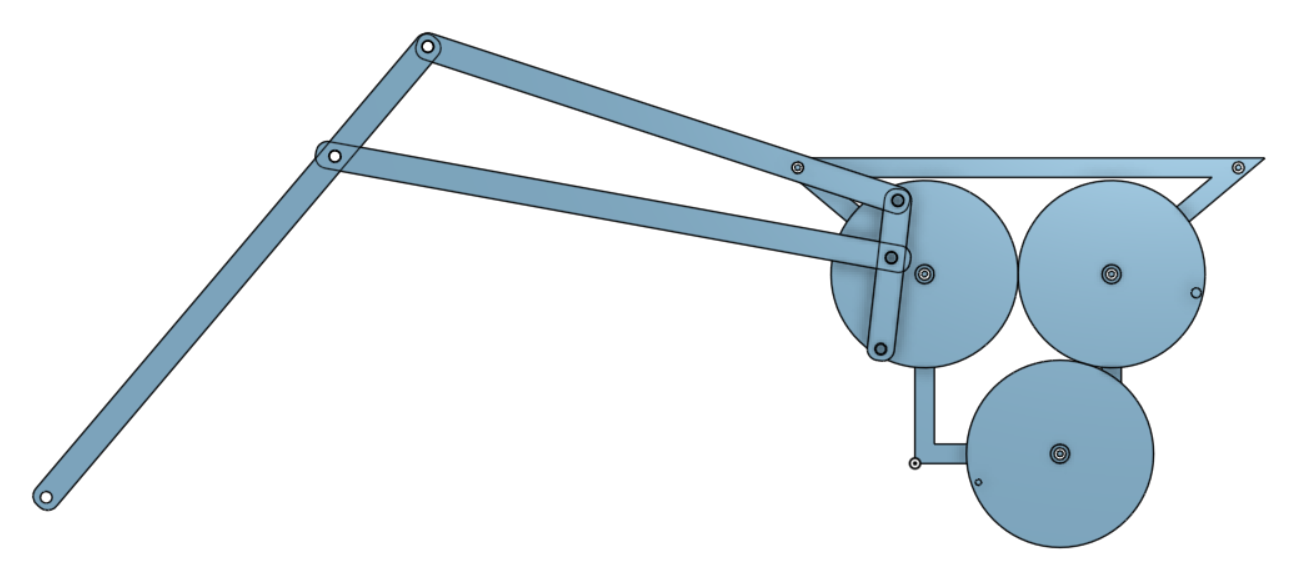
Le mécanisme
Pour que le mouvement soit transmis à la patte, il nous faut deux roues et deux bielles
Voici un exemple :
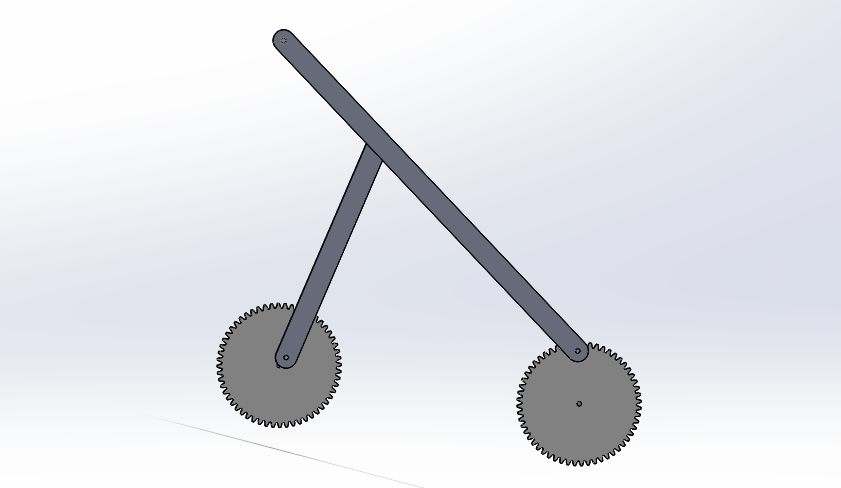
Roue et Bielle
Nous ajoutons le mécanisme en le contraignant avec les pattes. Nous pouvons alors commencer à chercher la bonne configuration pour avoir une trajectoire semblable à notre précédente esquisse.
On ne vous cache pas que, si vous regardez cette vidéo, Disney lab. montre un logiciel développé en interne pour faire ces trajectoires plus facilement en donnant directement la configuration des roues et bielles.
Video Disney Lab.
Cependant, ce serait trop beau si c’était aussi simple. En effet, ce logiciel n’existe pas pour le grand public.
Il faut donc y aller « à tâtons » pour trouver les bonnes longueurs.
(Conseil : mettez des variables pour pouvoir modifier plus simplement les distances.)
Ensuite, lorsque nous pensons avoir trouver une configuration qui correspondrait, nous pouvons utiliser motion sous SolidWorks pour tracer la trajectoire du point. Cela nous donne un aperçu de si la configuration est bonne ou s’il faut continuer à modifier.
Comme nous avions la même trajectoire pour la patte avant et arrière, celle-ci n’a été faite qu’une seule fois.
Lorsque nous sommes fixés sur la trajectoire, nous pouvons alors nous concentrer sur le mécanisme complet.
Il faut ajouter tous les mécanismes (4 pour nous car 4 pattes) et s’assurer que tout passe, sans que les pièces ne se touchent.
(Nous avons modifier le corps pour passer le mécanisme avant et arrière, puis fait une symétrie pour avoir la même chose du coté opposé)
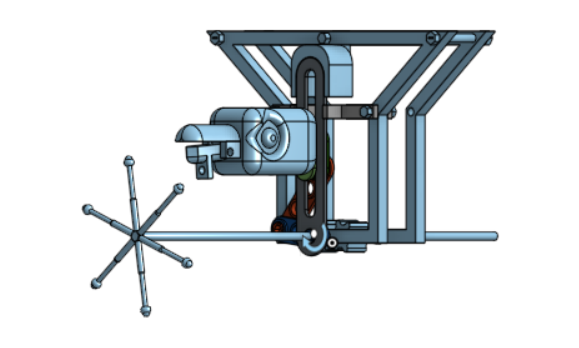
Le bâti
L’étape suivante est de créer le bâti pour accueillir l’automate.
Notre technique a été de créer une boite avec des dimensions qui englobent les mécanismes, puis de les modifier pour tenir le corps, faire passer les bielles et faire passer des arbres pour tenir les roues dentées.
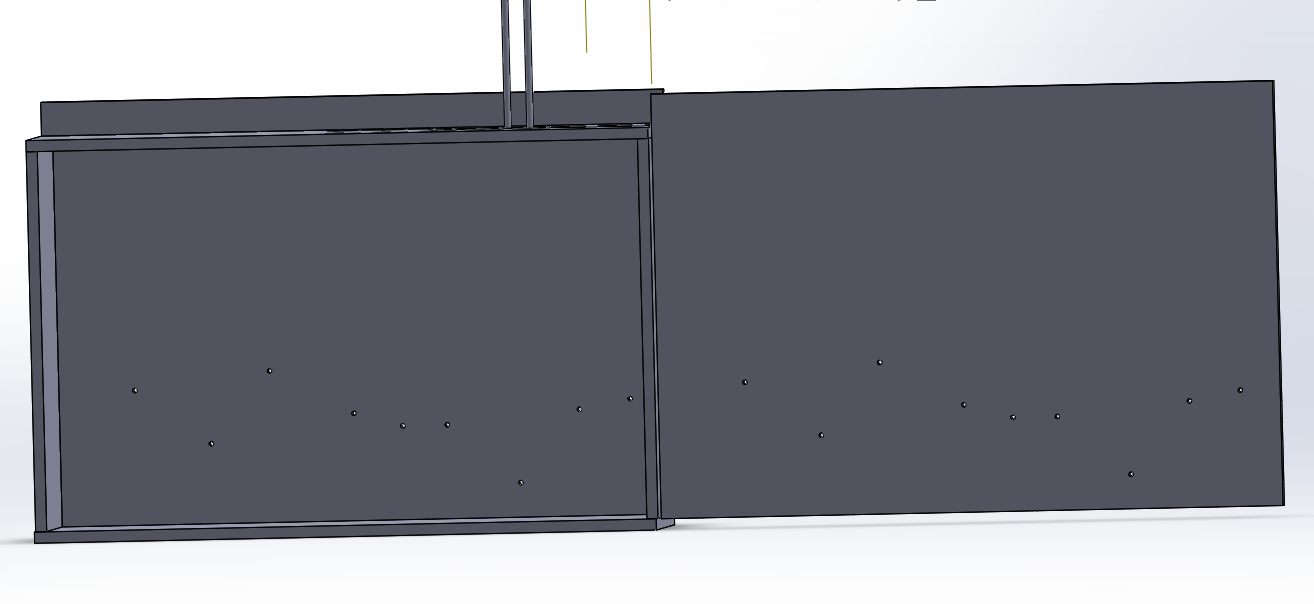
Bâti avec extrusion
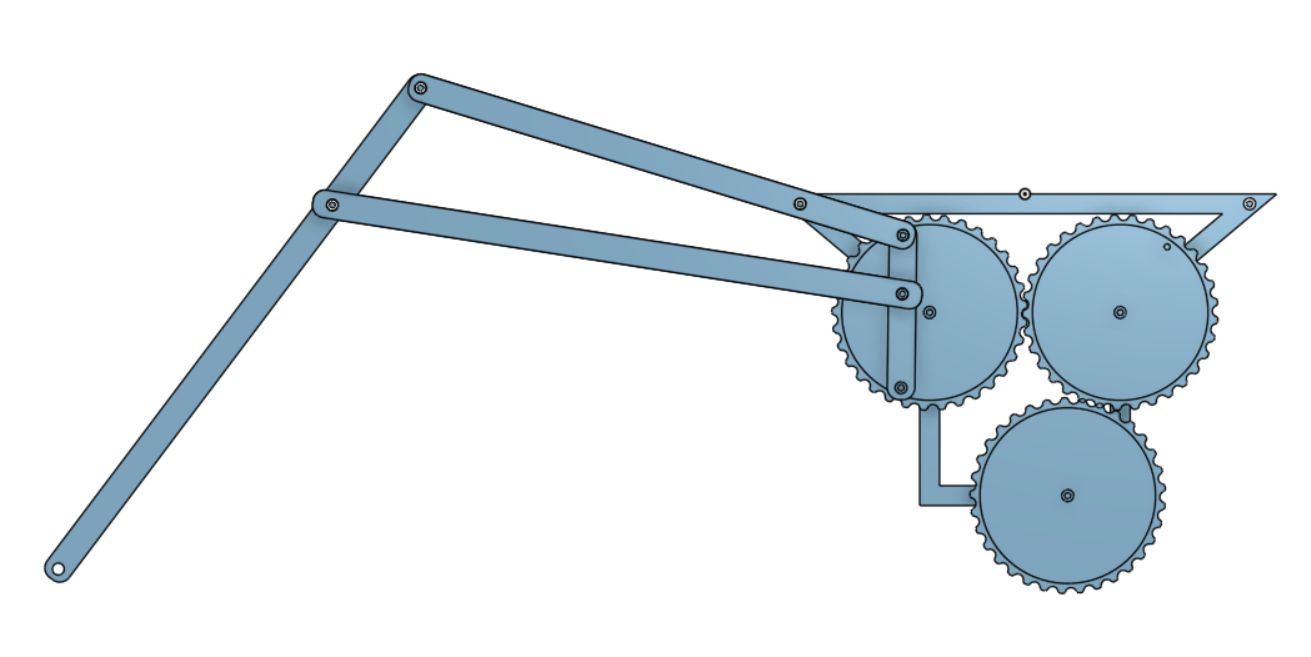
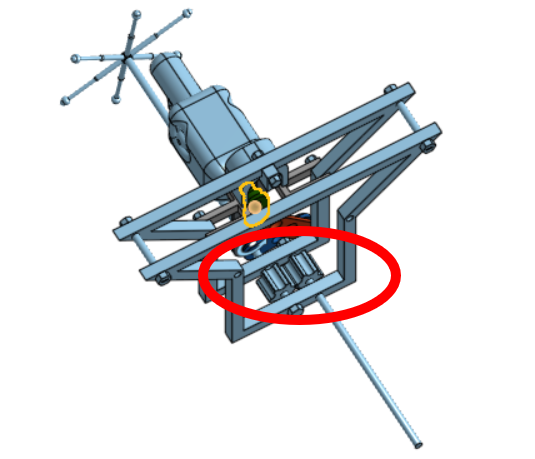
Une fois le bâti fini, place à la transmission intégrale. Après un bon moment de réflexion, nous avons décidé d’utiliser une cascade de pignons pour pouvoir transmettre les mouvements entre tous les pignons et avoir les mêmes vitesses de rotations.
Conseil : il est plus judicieux d’utiliser une cascade de pignons plutôt qu’une transmission pignon chaine ou courroie et roue.
(Il faut savoir que nous avons dû modifier tous nos engrenages, qui, au départ, avaient des tailles différentes, pour pouvoir avoir les bonnes vitesses de rotation.)
On a également dû revoir le bâti pour que tous les pignons passent.
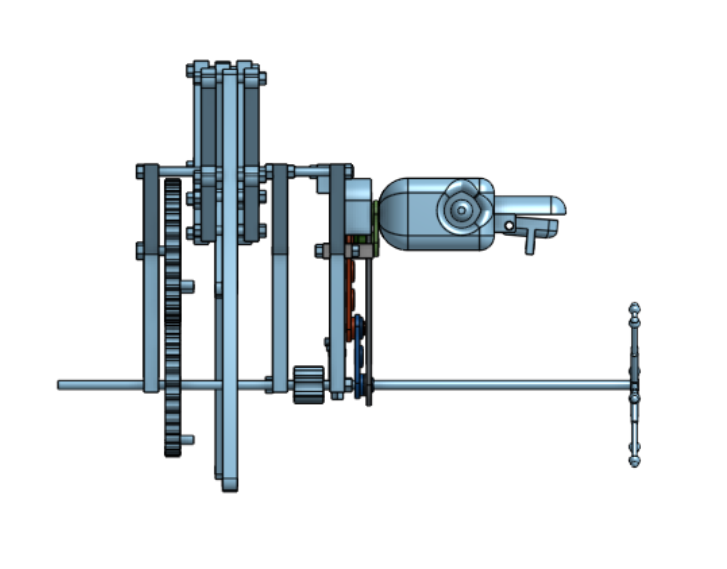
Le bâti fini, il ne reste plus qu’à ajouter tous les pignons et les contraindre afin de modéliser entièrement l’automate.
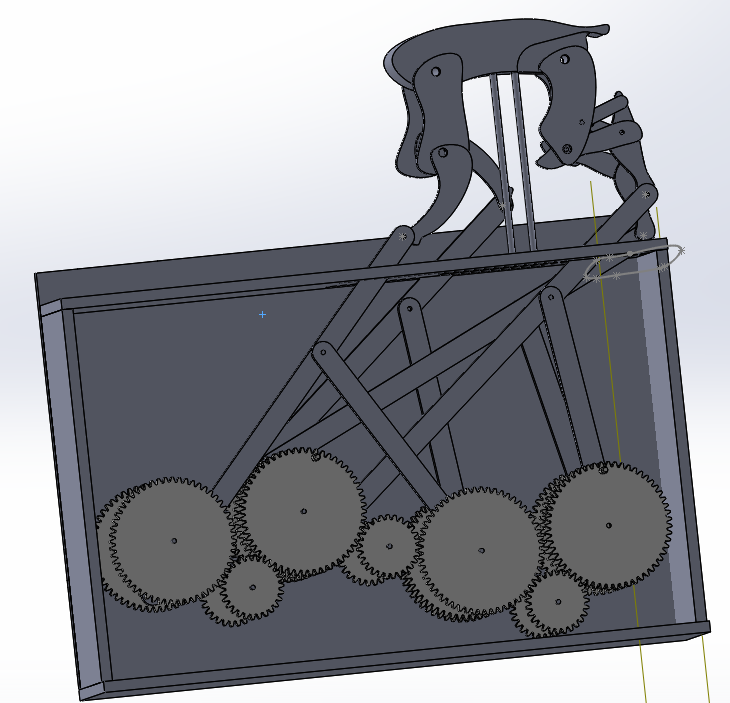
Modélisation pignon
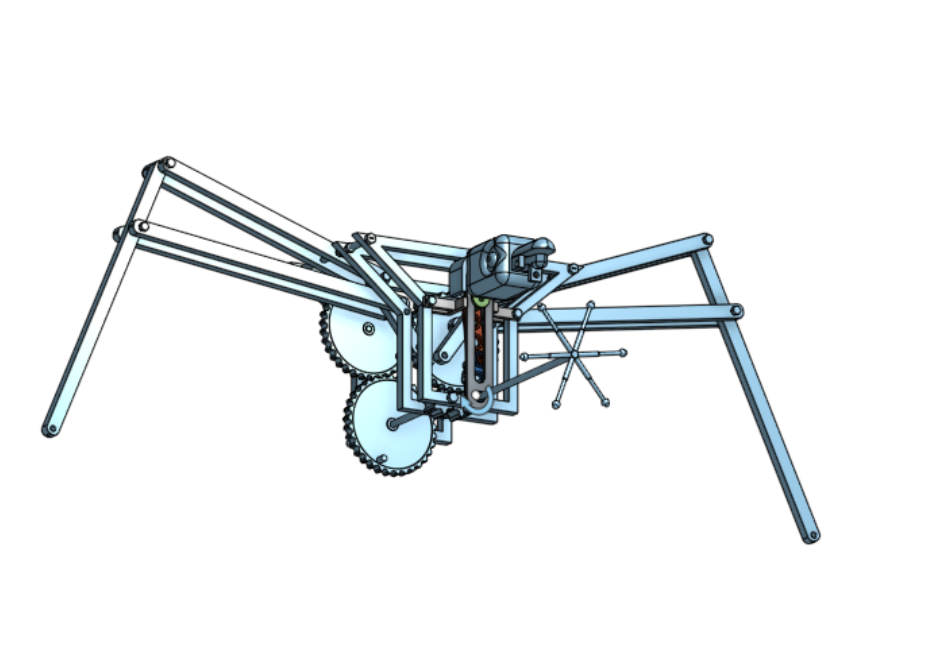
Voici la dernière étape avant une possible réalisation concrète. Il faut maintenant essayer la modélisation en faisant une animation avec un moteur sur un pignon pour voir si tout tourne correctement.
Si vous êtes arrivés là et que ça fonctionne, bravo vous pouvez maintenant réfléchir à la réalisation concrète !
Conclusion
La conception d’un automate animé pour la première fois n’est pas une mince affaire, même si le cahier des charges n’est pas des plus compliqués à respecter. Avec une bonne connaissance des logiciels, une vue d’ensemble du projet au départ et de la rigueur, ce projet peut être mené à bien aisément.
Dans le cadre de notre semestre 4 à Polytech Angers, ce projet a permis de regrouper certaines matières que nous avons travaillées au cours de nos 2 années de prépa.
Nous pensons avoir bien respecté le cahier des charges dans notre travail, même si le projet n’est pas complètement terminé. Des améliorations pour que les mouvements soient plus naturels et fonctionnent correctement auraient pu être faites.
Ce projet nous a donc permis de travailler en équipe et de développer plus de compétences sur SolidWorks. Au final, même si celui-ci n’aura pas été terminé, nous n’en tirons que du positif.
Si vous êtes arrivés jusque-là, merci de votre lecture !
Voici les annexes :
Source image Disney : disneyresearch.com
Source Image solid works : solidwork.com