
Nous sommes Alexis Brivain et Estelle Glaud, deux étudiants en deuxième année de cycle préparatoire. Pour ce semestre, nous devions travailler sur un projet et nous avons choisi le LIDAR vibrant.
BUT DU PROJET
Le but de ce projet est de réaliser un gant, muni d’un vibreur et du LIDAR, permettant à une personne de pouvoir détecter des objets dans le noir. Nous devions impérativement réaliser ce montage avec un LIDAR, qui a le même fonctionnement qu’un radar mais qui utilise des ondes électromagnétiques. Le LIDAR, grâce à un programme qui nous a été fourni, permet de calculer la distance à laquelle se trouve un objet.

PROGRAMMATION
Avec le logiciel Arduino, nous avons pu écrire un programme afin de créer une vibration d’une intensité dépendant de la distance à un objet. D’abord, nous avons réalisé un montage avec le LIDAR, la carte Arduino et une LED modélisant notre futur vibreur. Nous cherchions à modifier le programme afin d’obtenir un clignotement plus ou moins rapide en fonction de la distance entre un objet et le LIDAR.
Après plusieurs recherches et des explication de professeurs, nous avons pu mieux comprendre comment ajuster notre programme. Nous devions utiliser les broches PWM de l’Arduino, et entrer la distance en tant que paramètre de la fonction. Les broches PWM fonctionnant en terme de rapports cycliques et non d’intensité, nous avons dû créer une fonction qui renverrait 255 (correspond à 8 bits),c’est à dire 100% du signal, pour une distance nulle, et 0 pour une distance de 2m. Cela nous a donné y= -1,275*distance+255.
On vérifie bien que plus la distance est faible, plus la vibration est élevée et lorsqu’on éloigne un objet, l’intensité diminue pour finalement être nulle à partir de 2m.
Après plusieurs recherches et des explication de professeurs, nous avons pu mieux comprendre comment ajuster notre programme. Nous devions utiliser les broches PWM de l’Arduino, et entrer la distance en tant que paramètre de la fonction. Les broches PWM fonctionnant en terme de rapports cycliques et non d’intensité, nous avons dû créer une fonction qui renverrait 255 (correspond à 8 bits),c’est à dire 100% du signal, pour une distance nulle, et 0 pour une distance de 2m. Cela nous a donné y= -1,275*distance+255.
On vérifie bien que plus la distance est faible, plus la vibration est élevée et lorsqu’on éloigne un objet, l’intensité diminue pour finalement être nulle à partir de 2m.
MONTAGE
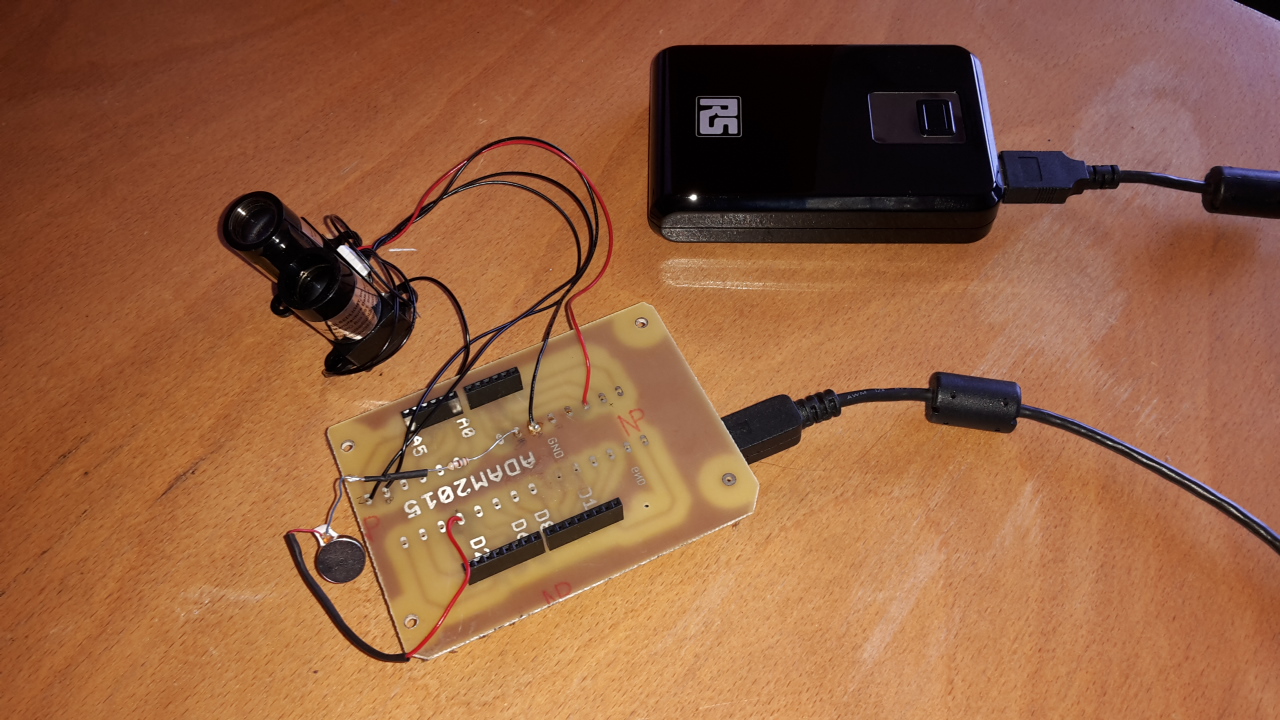
Nous avons commandé un vibreur ainsi qu’une batterie pour réaliser notre montage. Pour fixer les fils sur l’Arduino, nous avons récupéré une vieille carte sur laquelle nous avons soudé le LIDAR et le vibreur pour n’avoir plus qu’à plugger la carte sur l’Arduino. Nous avons rajouté une résistance de 120 ohms sur la carte pour assurer le bon fonctionnement du vibreur.

L’Arduino et cette carte sont placées sur le gant à l’intérieur de la main et le LIDAR est situé sur le dessus de la main. Quant au vibreur, nous l’avons glissé dans le gant pour qu’il vibre au niveau du majeur. L’Arduino est alimentée par une batterie que l’on peut glisser dans une poche. L’avantage de cette batterie est qu’elle a deux ports pouvant alimenter une deuxième Arduino sur un autre gant. Le problème de ce montage est qu’il est assez imposant, et donc pas très pratique à fixer. Par manque de temps, nous avons simplement cousu les éléments aux gants, et consolidé le tout avec un élastique.
Finalement, notre montage fonctionne correctement. Lorsque nous approchons le LIDAR de plus en plus d’un objet, on ressent une vibration de plus en plus intense. Un deuxième permettrait de complètement se repérer dans l’espace.
Nous remercions M. Autrique, notre tuteur pendant ce projet, ainsi que M. Bouljroufi pour leur aide.
BRIVAIN Alexis et GLAUD Estelle