
Voiture inertie
Le principe de la voiture à inertie était d’obtenir une voiture qui allait le plus loin possible avec comme seule force celle de son volant d’inertie.
Pour commencer, nous avons décidé de choisir ce projet car nous sommes tous intéressés par le domaine de la mécanique et la voiture à inertie a été l’un des seuls projets qui nous a permis de travailler dans ce secteur à quatre. Si nous travaillions sur un projet lié au secteur mécanique, nous aurions alors une meilleure vision de ce que nous allons faire l’année prochaine et nous pourrions voir si cela nous plaît. Nous souhaitions également travailler sur un projet avec relativement peu de contraintes numériques car c’est un domaine qui ne nous intéresse pas vraiment. La conception de la voiture à inertie nous apprend à appliquer de manière pratique les principes de la physique, de la mécanique et de l’ingénierie. Et cela nous permet de mettre en pratique nos connaissances théoriques dans un contexte réel. Nous avions envie de travailler sur ce projet car durant nos deux années à Polytech, il y avait relativement peu de travail manuel.

Nous sommes parti du projet de l’année dernière qui demandait des améliorations. Nous avons donc commencé par étudier les problèmes qu’il y avait sur cette version afin de déterminer ce que nous devions modifier. Après quelques réflexions et tests nous avons conclu que les problèmes principaux étaient la masse de la voiture et le trop grand nombre d’engrenages qui causait une perte de force conséquente. La voiture pesait 1200 grammes pour un volant de 400 grammes. Il fallait donc améliorer ce rapport “poids/puissance”.
Nous nous sommes appuyés sur des jouets pour enfant fonctionnant avec un volant d’inertie. Il y a un jouet qui fonctionnait très bien et qui a attiré notre attention. C’était une petite voiture buzz l’éclair. Elle pouvait rouler sur 15 mètres lorsqu’on la lançait.

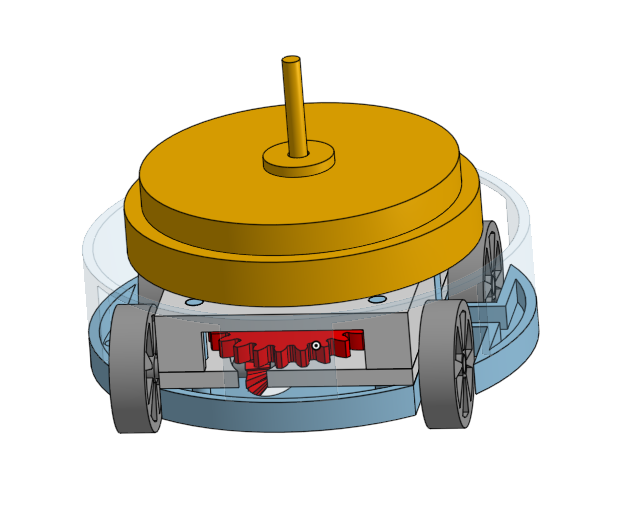
Nous l’avons donc démonté pour comprendre le fonctionnement et déterminer ce que nous devions faire. Il y avait un volant d’inertie horizontal qui était relié à un engrenage. cet engrenage en entrainait un autre qui lui entrainait les roues via un engrenage conique.

Une fois que nous avons compris comment était fait ce jouet, nous avons décidé de le reproduire avec une échelle x3 en impression 3D. Nous avons donc modélisé chaque pièce sur un logiciel de CAO dont nous avons acquéri les compétences de modélisation l’année précédente à Polytech . Nous avons ensuite assemblé ces pièces pour avoir une simulation de ce à quoi allait ressembler notre voiture.
Nous avons assemblé toutes les pièces pour tester le fonctionnement de notre voiture. Durant nos tests, nous avons remarqué que les engrenages coniques ne s’engrenaient pas bien. Nous avons donc décidé de les remplacer par des engrenages coniques métalliques. En effet, les engrenages en plastique n’avaient pas un super entrainement notamment dû à leur forme qui n’était pas optimal.

Nous avons refait des tests le volant entrainait très bien les roues mais il y avait un très gros problème de frottements qui empêchait le volant de prendre de la vitesse. Le volant appuyait sur le bâtit, les engrenages frottaient sur le bâtit et les axes des roues frottaient sur le bâtit. Nous devions donc essayer de les réduire au maximum pour obtenir une voiture fonctionnelle.

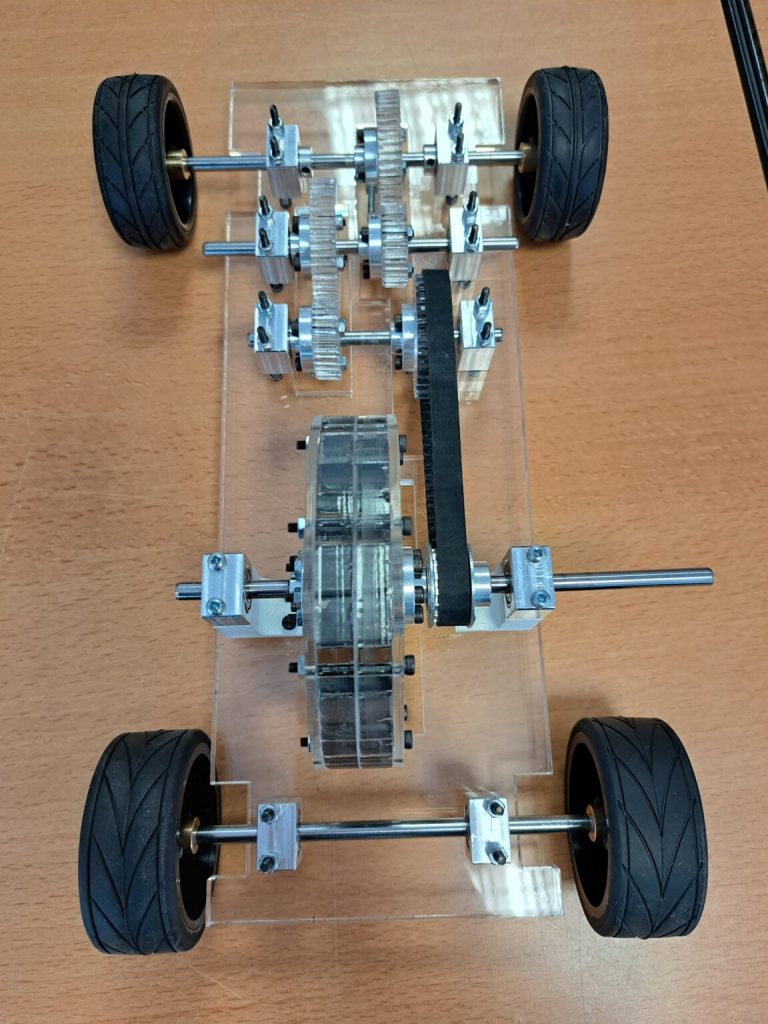
Pour réduire au maximum ces frottements, nous avons choisi de faire la voiture en plexiglas. Nous avons découpé ces pièces grâce à la découpeuse laser. Cela était plus solide et surtout plus rapide que l’impression 3D. Nous avons rajouté des roulements pour tenir tous les axes et une butée à bille pour tenir le volant. Nous avons aussi retiré un engrenage pour n’avoir que les engrenages coniques et perdre moins de force.
Nous avons donc assemblé notre 2ème version. Elle parcourait environ 6m. Nous avons ajouté de la masse dans le volant afin qu’il stocke plus d’énergie. Il est passé de 220 grammes à 500 grammes. Nous avons aussi lubrifié tous les roulements et engrenages. En faisait cela notre voiture parcourait entre 15 20 mètres en la lançant à la main.
L’amélioration qui peut être faîte est de rajouter un système qui permettrait de lancer la voiture sans la force humaine. Comme par exemple en faisant tourner l’axe du volant avec un perceuse pour qu’il atteigne une vitesse importante puis reposer les roues au sol.
Ce projet a été intéressant pour nous 4. Nous sommes parti d’un modèle avec des problèmes, avons dû les déterminer puis les régler en nous appuyant sur les enseignements de Polytech . Cela nous montre le réel travail d’un ingénieur mécanique et nous a conforté dans notre choix d’orientation.
Alexandre Tom Martin et Ruben