Bonjour à tous !
-
Nous sommes trois étudiants, Adrien Bayer, Stéven Jossot et Florian Adam, actuellement en deuxième année de cycle préparatoire à l’ISTIA, école d’ingénieurs de l’Université d’Angers, et nous avons la chance de pouvoir développer nos connaissances au travers d’un projet de conception. Notre choix s’est porté sur le RC Crawler.Le but est de concevoir un 4×4 radiocommandé en 3D à l’aide du logiciel SolidWorks, puis de réaliser un prototype, dans le même registre que celui-ci:
- Dans un premier temps, la conception et le dimensionnement des pièces sur SolidWorks.
- Nous sommes ensuite passés dans un phase de commande des pièces que ne nous pouvions ni fabriquer à l’ISTIA, ni récupérer sur d’anciens projets.
- En effet, de nombreuses pièces telles que la boîte de transfert, les arbres de transmissions, le variateur de vitesse, etc … n’étaient pas disponible. Cependant, nous avons pû récupéré un servomoteur (qui gère la direction à l’avant du véhicule) ainsi qu’un moteur et une batterie auprès des enseignants.
Au fur et à mesure de la réception des commandes, nous avons assemblé notre Crawler.
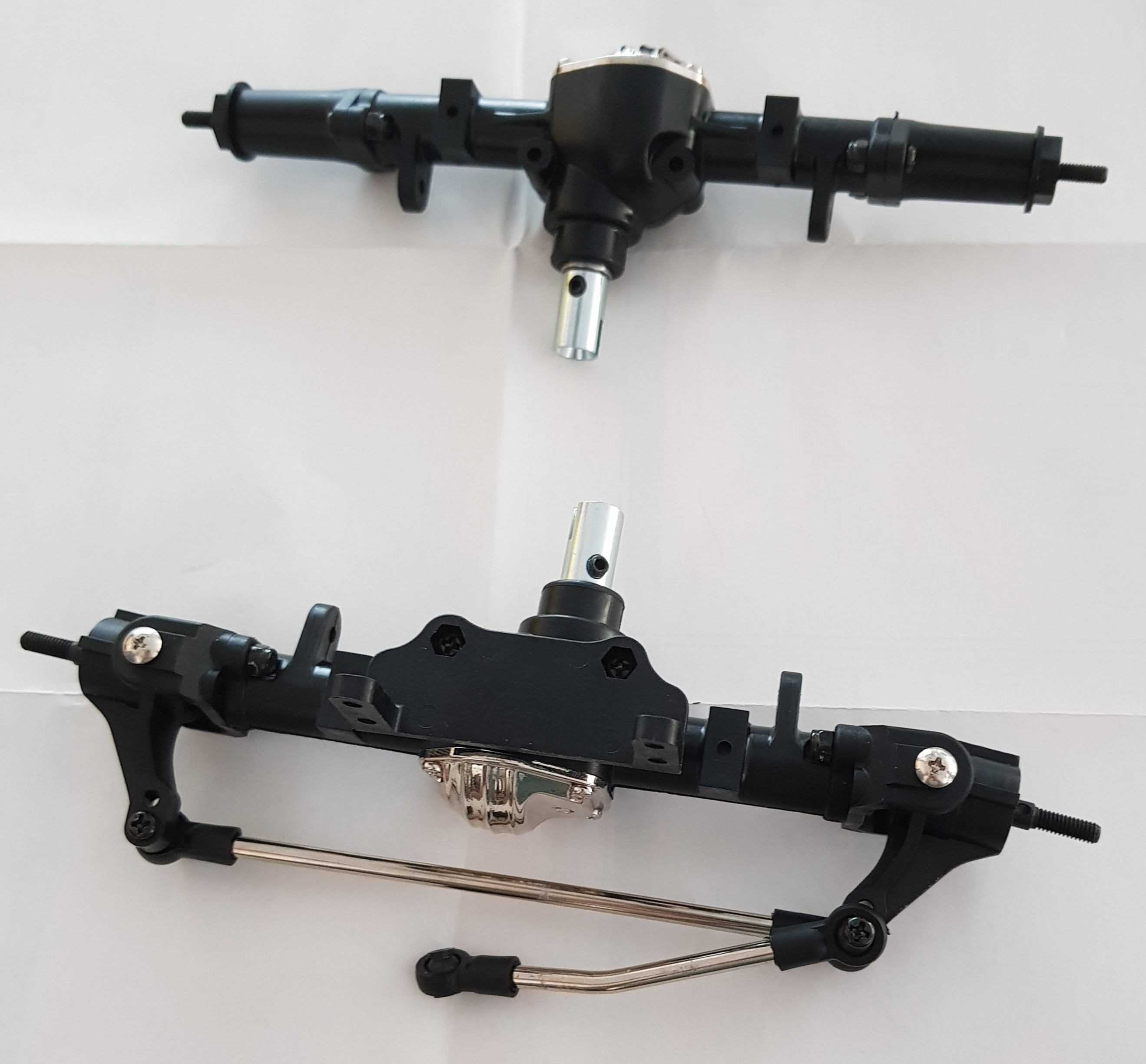
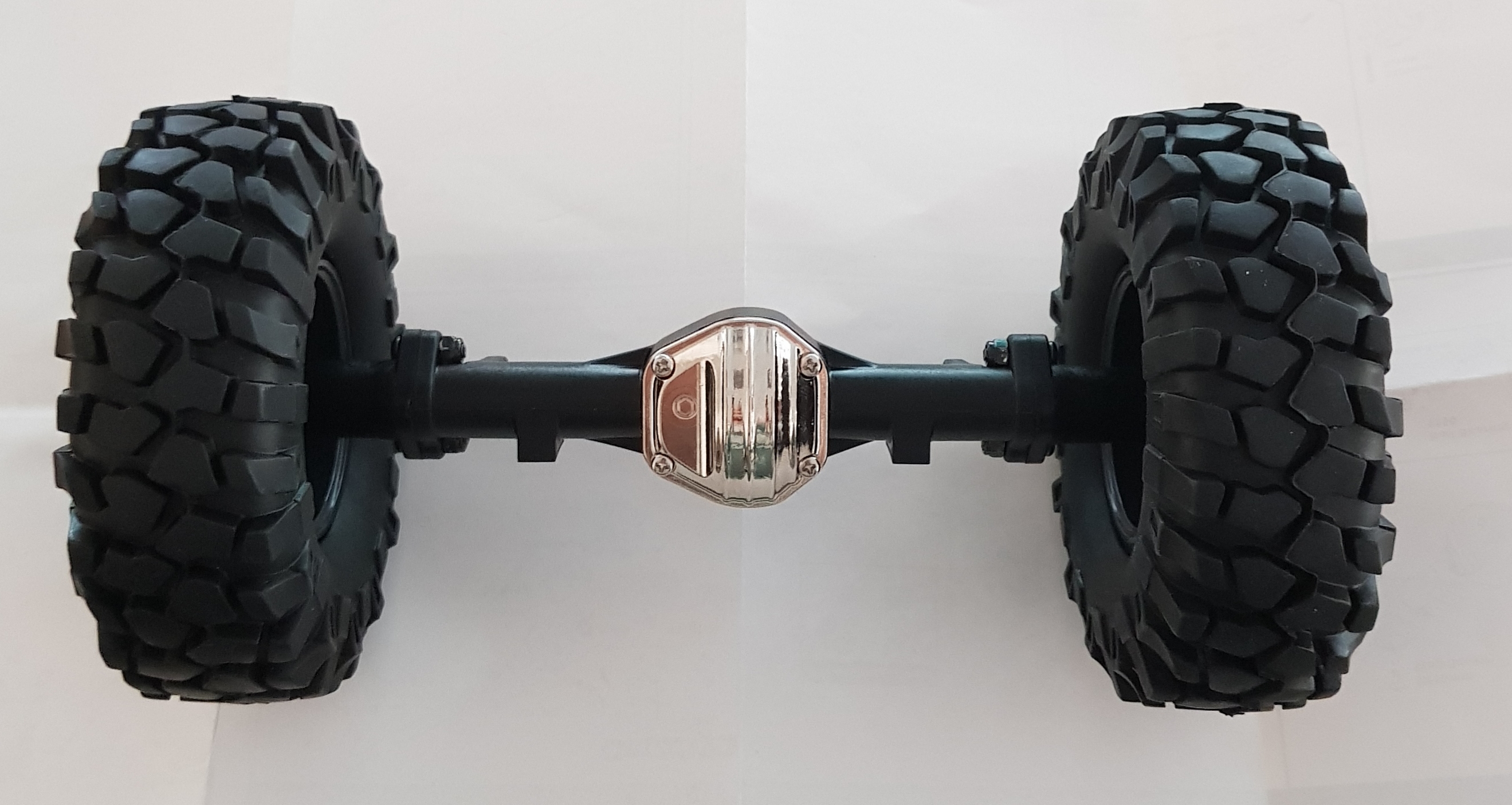
Pont avant et arrière

Pont arrière + roues
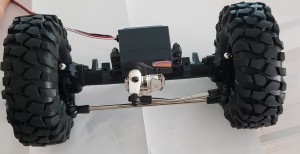
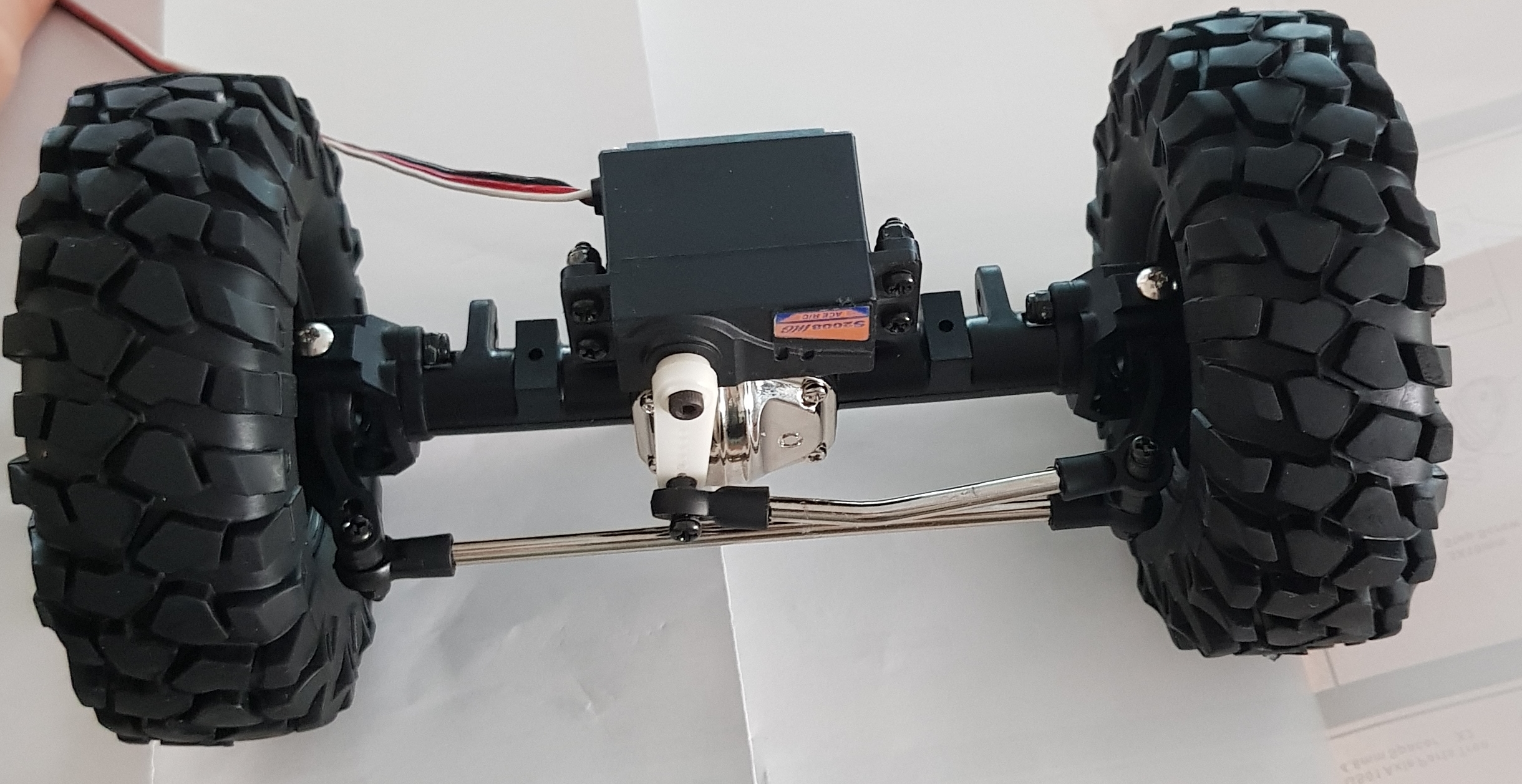
Pont avant + servomoteur + roues
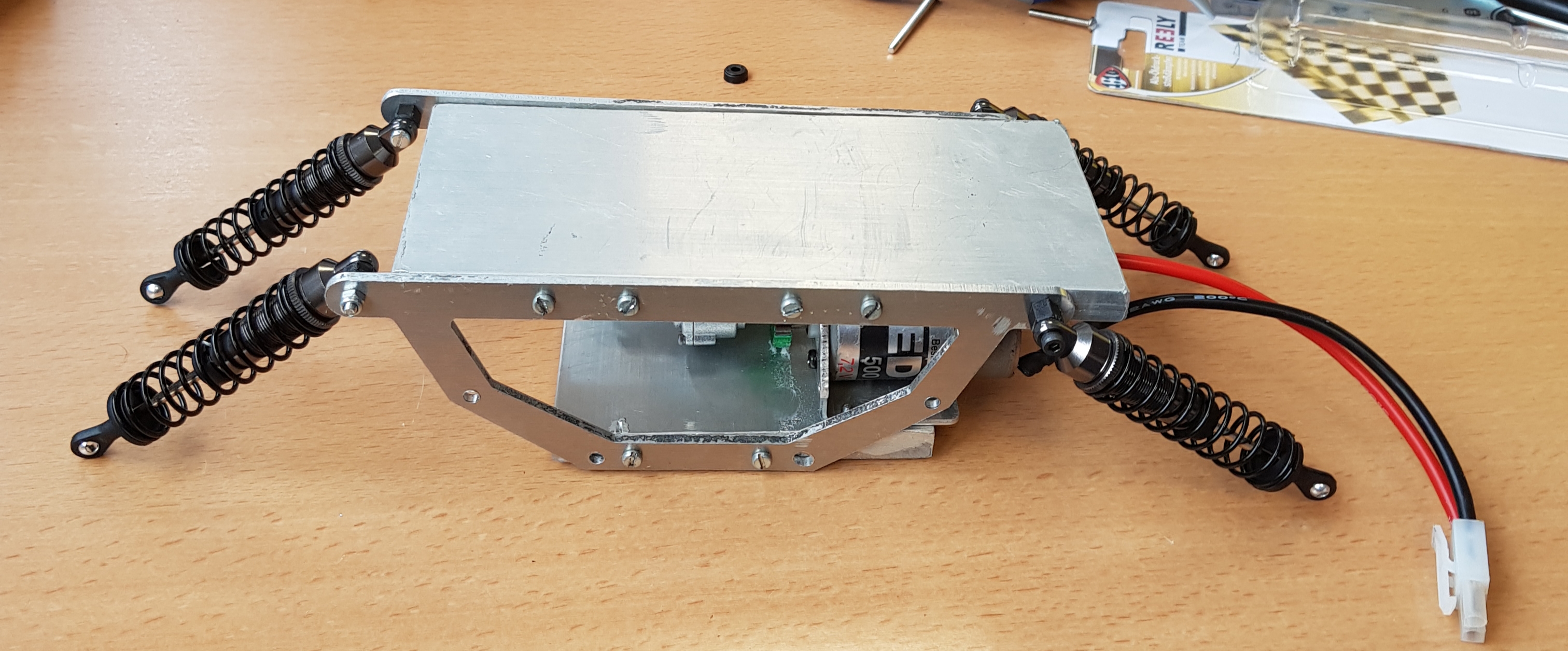
- Enfin dernière étape, nous avons fabriqué les dernières pièces et réalisé l’assemblage.
- Cette étape nous a permis d’utiliser la fraiseuse numérique ainsi que la perceuse à colonne. Nous avons aussi appris de nouvelles techniques que nous n’avions jamais utilisé comme le taraudage.

RC Crawler
Extrait de : http://www.rcscrapyard.net/fr/xtm-x-crawler.htm
L’objectif de ce projet est de pouvoir gravir des obstacles, notamment un rocher situé devant l’un des bâtiments de notre école.
Plus concrètement, cliquez ici pour voir comment fonctionne un crawler !
Avant tout, ne connaissant que très peu de choses au sujet des véhicules radiocommandés, nous avons dû nous documenter en conséquence. Après plusieurs propositions au sein du groupe, nous avons choisi de concevoir un crawler composé d’un châssis avec les éléments mécaniques (moteur et boîte de transfert) fixés sur une plaque inférieure et les éléments électroniques (batterie, variateur de vitesse et récepteur) fixés sur une plaque supérieure. Ensuite, des arbres de transmissions partant du centre du véhicule sont reliés aux ponts avant et arrière afin d’entraîner les roues en rotation. Cela correspond donc à l’architecture d’un MOB (Motor On Board) comme cela:

Architecture d’un MOB
Extrait de : http://rcshafty.fr/category/generalite-sur-un-crawler/
Ensuite le déroulement de notre projet a suivi trois étapes clés:
-
C’est l’étape la plus longue, puisqu’il faut trouver les bonnes coupes et dimensions pour que tous les composants puissent s’assembler correctement. Par chance, lors de nos recherches, nous avons trouvé un RC Crawler modélisé sous SolidWorks, ce qui nous a permis de reprendre certaines pièces et de s’aider des autres pour concevoir les notres.
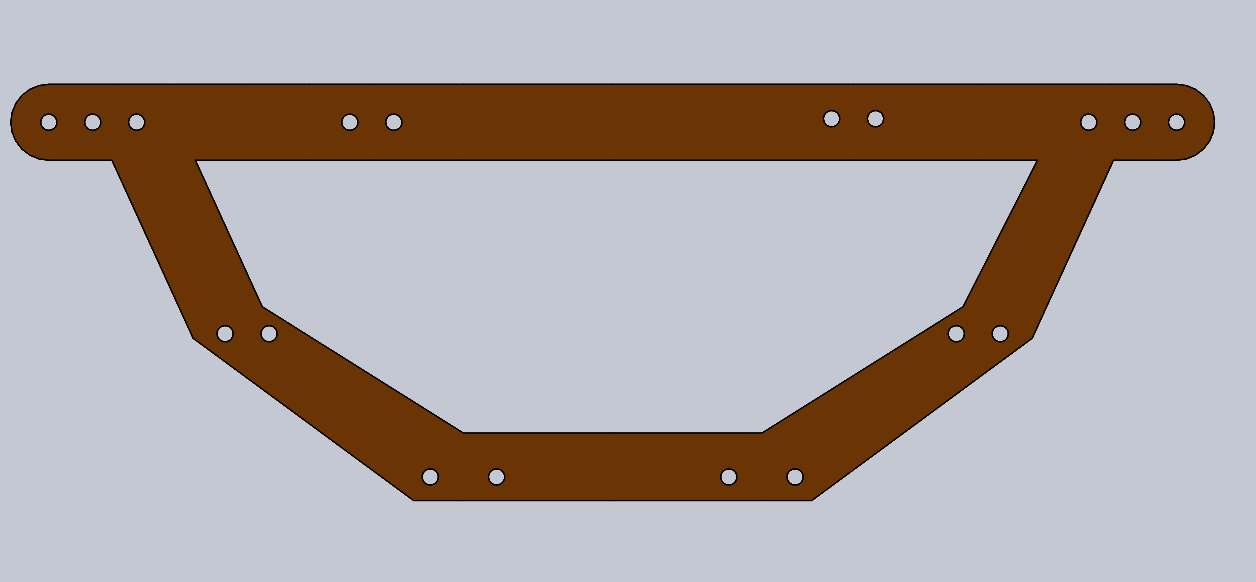
En outre, la pièce la plus importante était donc le châssis, puisque l’objectif était de l’usiner sur les machines disponible au FabLab.
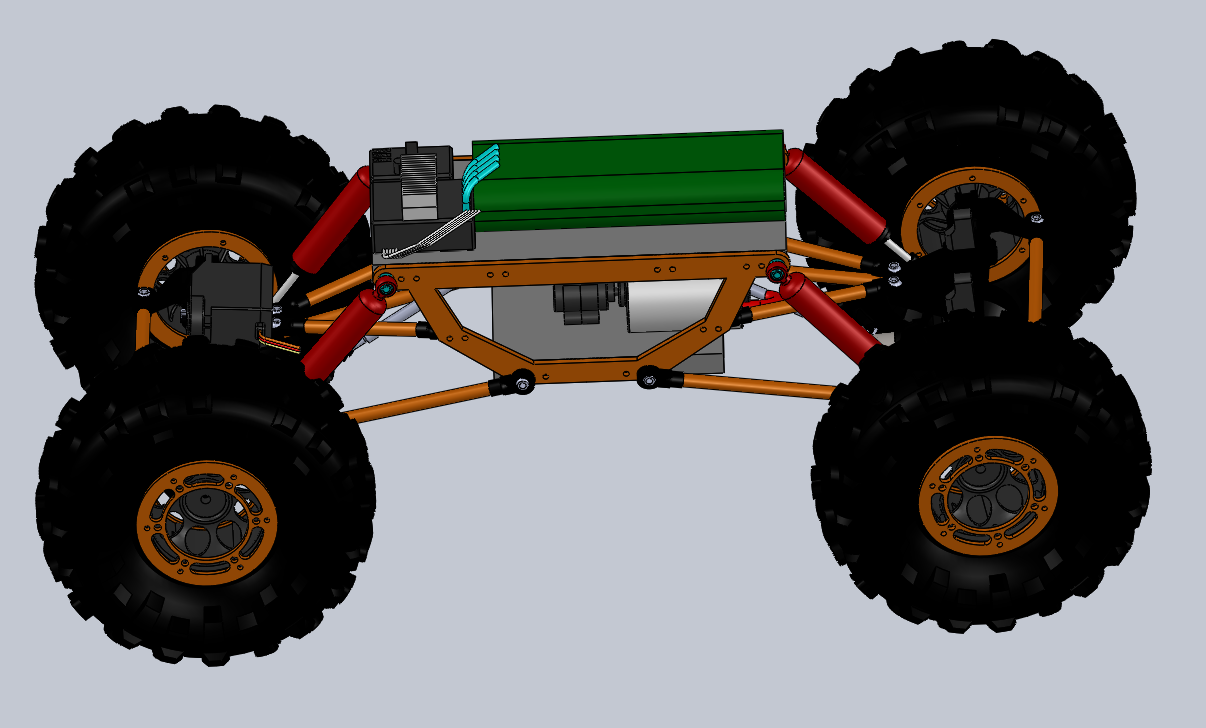
- Une fois que toutes les pièces ont été réalisées puis assemblées, nous avons obtenu ce résultat final:

Perçage du châssis
-
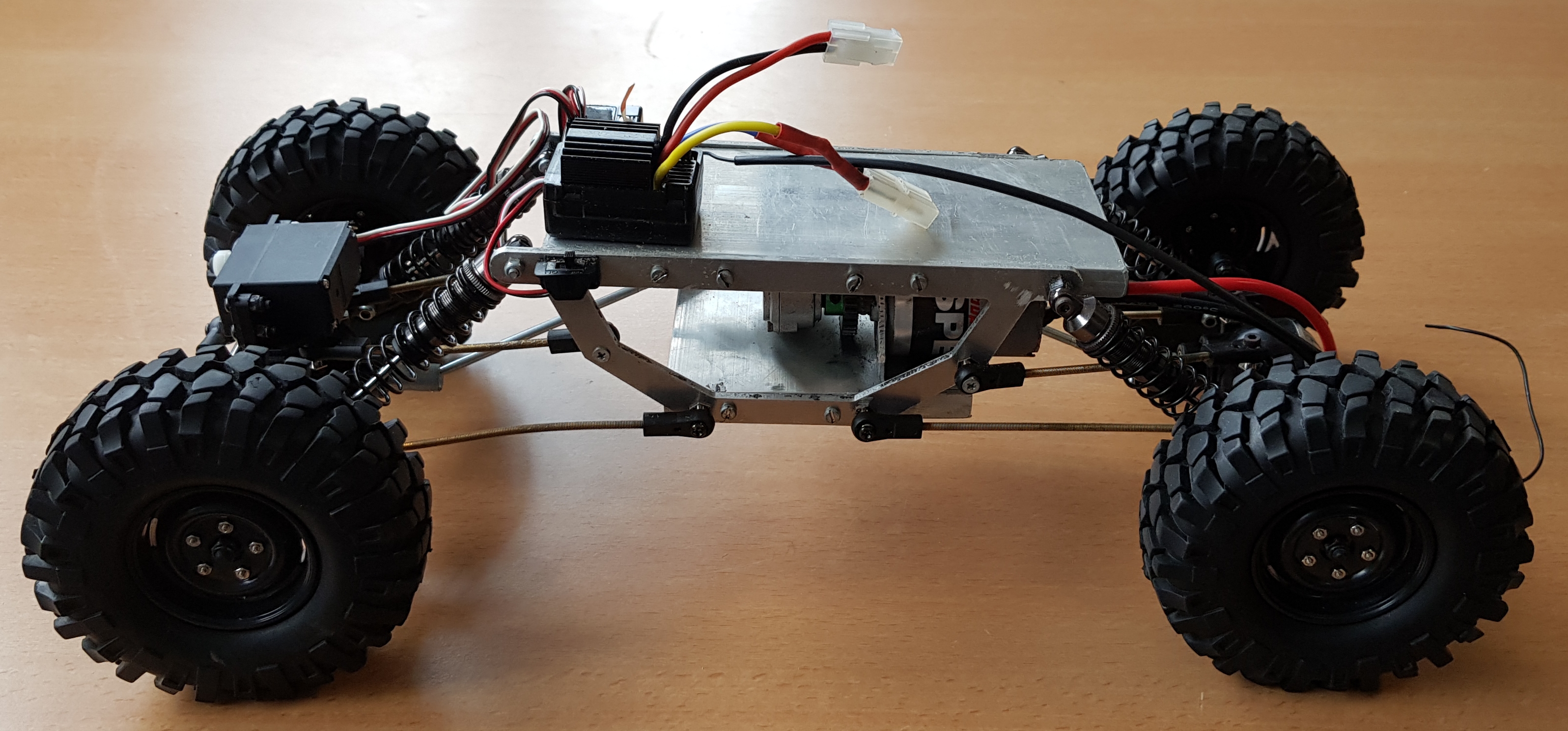
Pour finir cette présentation du projet RC Crawler, voici une photo de notre prototype assemblé (Sans la batterie)
- Nous tenons à remercier notre professeur référent M. VERRON pour nous avoir accompagné tout au long du projet, ainsi que M. MERCIER et M. BOULJROUFI pour leur aide précieuse.