
Bonjour à vous !
Actuellement en deuxième année de cycle préparatoire ingénieur, nous avons comme choisi comme projet la conception d’une pince robot pour le robot Kuka. On est trois étudiants à faire ce projet : Alexis, Gabriel et Ahmed. Intéressés par le domaine de la mécanique et de la robotique, ce projet nous semblait une bonne approche pour mieux comprendre ces derniers. On a pu découvrir le fonctionnement de certains logiciels comme SolidWorks ou alors Arduino, le fonctionnement des imprimantes 3D ainsi que des microcontrôleurs de la pince. On a été accompagner par Monsieur Boimond tout au long de notre projet.

Source : “https://www.kuka.com/fr-ch/produits-et-prestations/syst%C3%A8mes-de-robots/robots-industriels/kr-3-agilus”
Objectif :
Notre objectif principal était de réaliser une pince robot que l’on peut fixer au robot Kuka et que l’on peut piloter afin de pouvoir saisir des objets de petite dimension.
Nous devions donc :
– Créer une pince ou alors adapter une pince qui existe au préalable.
– Créer un code nous permettant de contrôler la pince.
– Créer une flasque qui se mettra entre la base de la pince et l’extrémité du Kuka.
– Mettre en relation la pince et le robot Kuka.
La première étape était d’actionner une pince d’un autre robot, celle du braccio (voir photo ci-dessous).

Robot Braccio
On a désassemblé la pince du bras pour pouvoir la simuler toute seule. On est parvenu à la faire fonctionner sauf qu’on avait un petit problème avec le code de l’Arduino. Le code créer au préalable était celui des 6 servo-moteurs du Braccio (vu qu’il possède 6 servo-moteurs pour ses différentes articulations), on a dû isoler celui de la pince. Aussi, les valeurs des angles d’ouvertures et de fermetures n’étaient pas correctes, on peut entendre un bruit de résistance dans la vidéo ci-contre.
Il faut savoir que le servo-moteur de la pince ne peut faire qu’une rotation de 180°. On les a donc changés pour des valeurs plus correctes tout en s’assurant à ne pas casser la pince. On a créé un nouveau code Arduino tout en s’inspirant de l’ancien pour faire en sorte que la pince se ferme quand on applique une tension sur l’une des pins libres de l’Arduino, pour que ça fonctionne comme un bouton poussoir. Si la tension de la pin 5 par exemple est de 5V alors elle passe à 1, la pince se ferme. Si la tension de la pin 6 passe à 5V alors la pince se met en position ouverte. Après quelques tests, la pince semble fonctionner correctement.
L’étape suivante consiste à créer une flasque qui permettra de relier la base de la pince à l’extrémité du robot Kuka. Pour ce faire on a utilisé SolidWorks. À l’aide de la documentation ci-dessous, on a pu créer la pièce que l’on a imprimée en 3D par la suite.

Schéma de l’éxtremité du robot Kuka
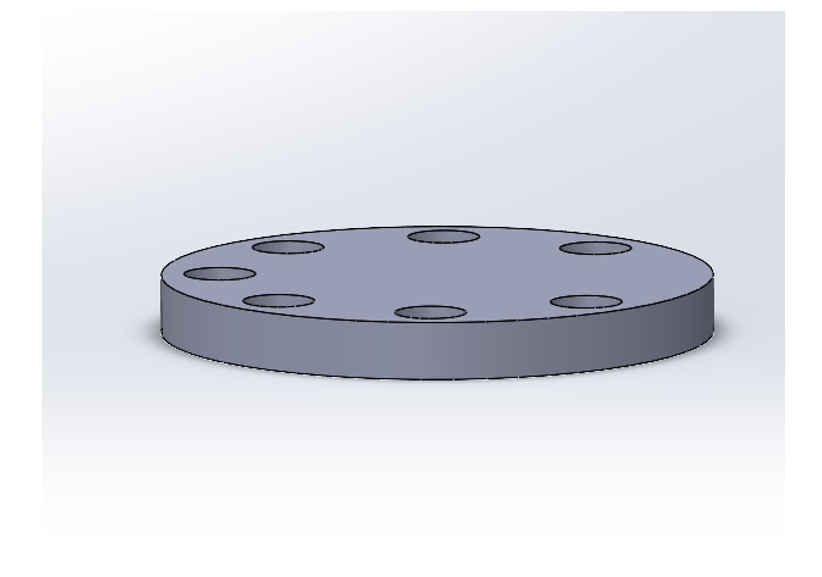
Flasque sous SolidWorks

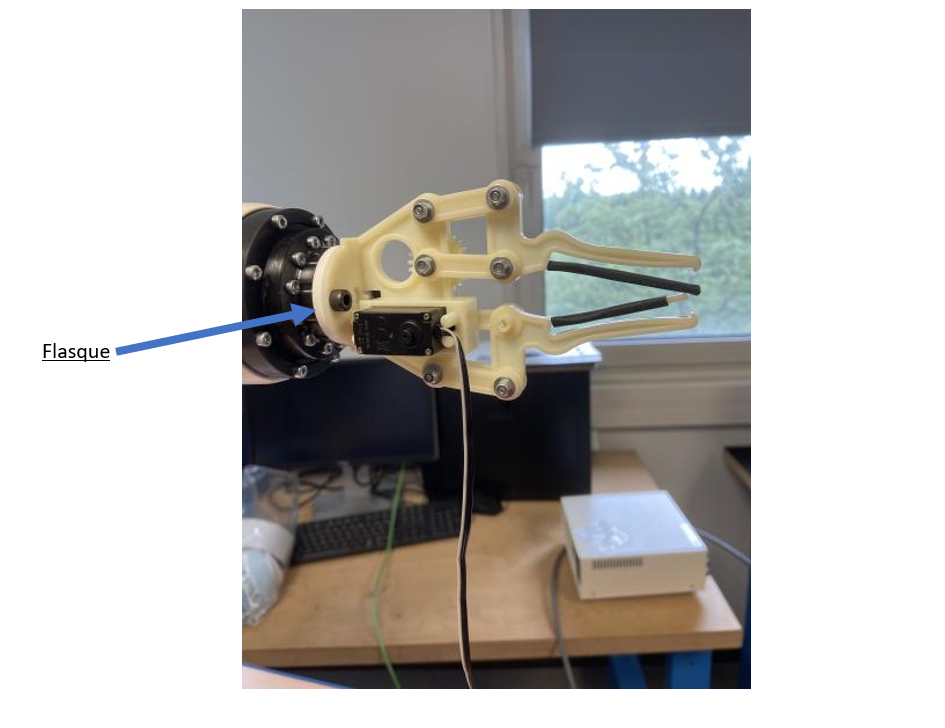
Pince avec la flasque fixée sur le robot
Une fois ces étapes terminées, on a commencé à chercher comment connecter la pince robot avec l’Arduino au robot Kuka et son boitier de commande. On n’a pas pu trouver comment relier directement les entrées de l’Arduino au boitier de commande du Kuka. On a trouvé une solution alternative qui consiste à utiliser des bus. Ce sont des systèmes qui permettent la transmission d’informations entre différents composants. Ils assurent la liaison et la communication entre ces différents composants. Cependant, on a pu recevoir à temps la pièce nécessaire qui permet de relier l’Arduino au boitier de commande du Kuka. On a donc pas pu les relier entre eux.
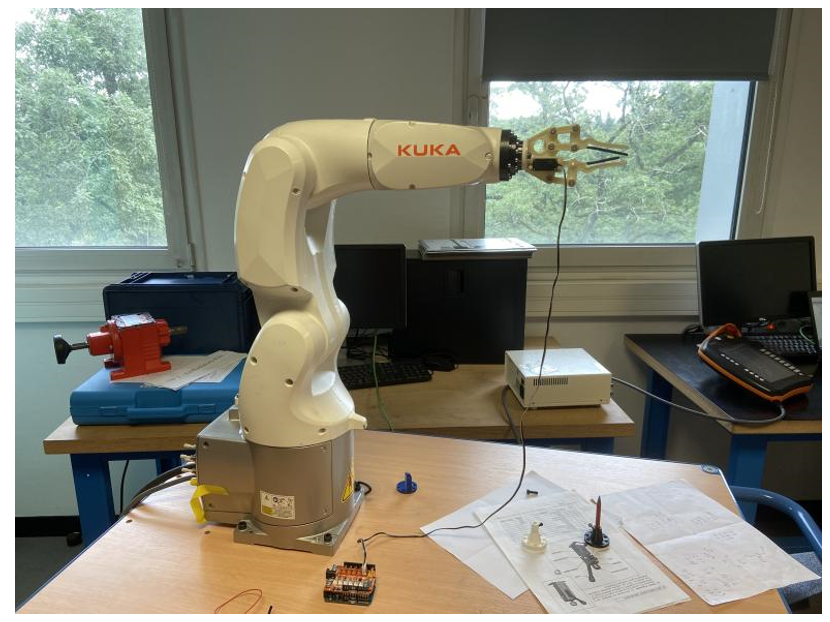
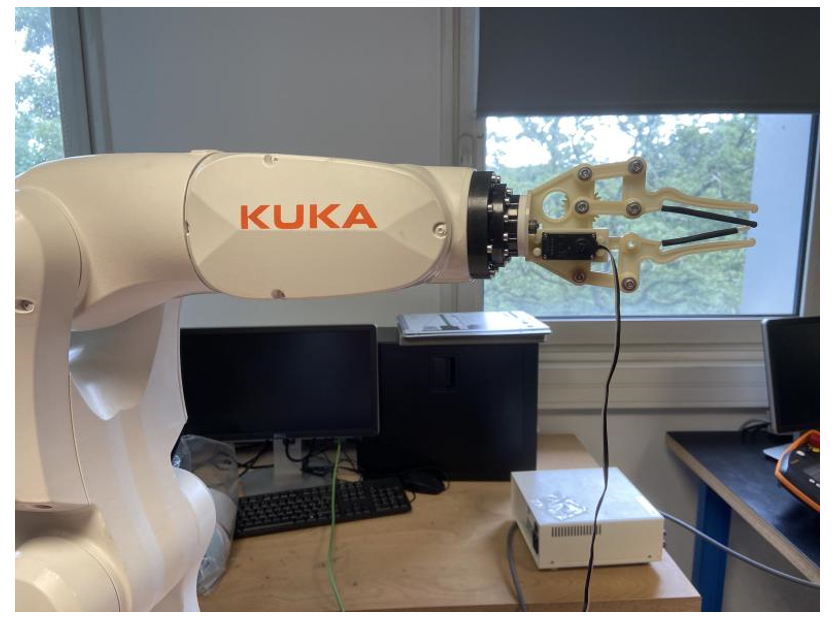
Rendu Final
Conclusion
L’expérience fut enrichissante et stimulante, nous avons pu découvrir les différentes étapes pour la conception d’une pince robot, de la conception en CAO à la création du code Arduino. Nous avons pu apprendre davantage sur des sujets qui nous passionnent, et d’expérimenter dans ces domaines. Ce projet nous a permis d’approfondir nos connaissances en ce qui concerne la programmation (en C++ et en Arduino) ainsi que la conception 3D en CAO (notamment via SolidWorks et TinkerCad).
D’un point de vue global, ce projet nous a permis de progresser sur notre manière d’appréhender un travail de groupe, sur la diffusion des connaissances et sur notre organisation.
Merci d’avoir lu jusqu’au bout !